En física , una fuerza es una influencia que puede hacer que un objeto cambie su velocidad , es decir, que acelere , es decir, un cambio de velocidad o dirección, a menos que esté contrarrestado por otras fuerzas. El concepto de fuerza hace que la noción cotidiana de empujar o tirar sea matemáticamente precisa. Como la magnitud y la dirección de una fuerza son importantes, la fuerza es una cantidad vectorial . La unidad de fuerza en el SI es el newton (N) , y la fuerza suele representarse con el símbolo F. [1]
La fuerza juega un papel central en la mecánica clásica, figurando en las tres leyes del movimiento de Newton , que especifican que la fuerza sobre un objeto con una masa invariable es igual al producto de la masa del objeto por la aceleración que sufre. Los tipos de fuerzas que se encuentran a menudo en la mecánica clásica incluyen fuerzas elásticas , de fricción , de contacto o "normales" y gravitacionales . La versión rotacional de la fuerza es el torque , que produce cambios en la velocidad de rotación de un objeto. En un cuerpo extendido, cada parte suele aplicar fuerzas sobre las partes adyacentes; la distribución de tales fuerzas a través del cuerpo es la tensión mecánica interna . En equilibrio, estas tensiones no causan aceleración del cuerpo ya que las fuerzas se equilibran entre sí. Si estos no están en equilibrio pueden causar deformación de materiales sólidos o flujo en fluidos .
En la física moderna , que incluye la relatividad y la mecánica cuántica , las leyes que gobiernan el movimiento se revisan para basarse en las interacciones fundamentales como origen último de la fuerza. Sin embargo, la comprensión de la fuerza proporcionada por la mecánica clásica es útil para fines prácticos. [2]
Los filósofos de la antigüedad utilizaron el concepto de fuerza en el estudio de objetos estacionarios y en movimiento y máquinas simples , pero pensadores como Aristóteles y Arquímedes mantuvieron errores fundamentales en la comprensión de la fuerza. En parte, esto se debió a una comprensión incompleta de la fuerza de fricción , a veces no obvia, y, en consecuencia, a una visión inadecuada de la naturaleza del movimiento natural. [3] Un error fundamental fue la creencia de que se requiere una fuerza para mantener el movimiento, incluso a una velocidad constante. La mayoría de los malentendidos anteriores sobre el movimiento y la fuerza fueron finalmente corregidos por Galileo Galilei y Sir Isaac Newton . Con su visión matemática, Newton formuló leyes del movimiento que no fueron mejoradas durante más de doscientos años. [1]
A principios del siglo XX, Einstein desarrolló una teoría de la relatividad que predijo correctamente la acción de fuerzas sobre objetos con momentos crecientes cercanos a la velocidad de la luz y también proporcionó información sobre las fuerzas producidas por la gravitación y la inercia . Con conocimientos modernos sobre la mecánica cuántica y la tecnología que puede acelerar partículas cercanas a la velocidad de la luz, la física de partículas ha ideado un modelo estándar para describir las fuerzas entre partículas más pequeñas que los átomos. El modelo estándar predice que las partículas intercambiadas llamadas bosones de calibre son el medio fundamental por el cual se emiten y absorben fuerzas. Sólo se conocen cuatro interacciones principales: en orden de fuerza decreciente, son: fuerte , electromagnética , débil y gravitacional . [4] : 2–10 [5] : 79 Las observaciones de la física de partículas de alta energía realizadas durante las décadas de 1970 y 1980 confirmaron que las fuerzas débil y electromagnética son expresiones de una interacción electrodébil más fundamental . [6]

Desde la antigüedad el concepto de fuerza ha sido reconocido como parte integral del funcionamiento de cada una de las máquinas simples . La ventaja mecánica proporcionada por una máquina simple permitió utilizar menos fuerza a cambio de que esa fuerza actuara a mayor distancia por la misma cantidad de trabajo . El análisis de las características de las fuerzas finalmente culminó en el trabajo de Arquímedes , quien fue especialmente famoso por formular un tratamiento de las fuerzas de flotación inherentes a los fluidos . [3]
Aristóteles proporcionó una discusión filosófica sobre el concepto de fuerza como parte integral de la cosmología aristotélica . En opinión de Aristóteles, la esfera terrestre contenía cuatro elementos que descansan en diferentes "lugares naturales" de la misma. Aristóteles creía que los objetos inmóviles en la Tierra, aquellos compuestos principalmente por los elementos tierra y agua, estaban en su lugar natural cuando estaban en el suelo, y que permanecían así si se los dejaba solos. Distinguió entre la tendencia innata de los objetos a encontrar su "lugar natural" (por ejemplo, la caída de cuerpos pesados), que conducía al "movimiento natural", y el movimiento antinatural o forzado, que requería la aplicación continua de una fuerza. [7] Esta teoría, basada en la experiencia cotidiana de cómo se mueven los objetos, como la aplicación constante de una fuerza necesaria para mantener un carro en movimiento, tenía problemas conceptuales para explicar el comportamiento de los proyectiles , como el vuelo de las flechas. Un arquero hace que la flecha se mueva al inicio del vuelo, y luego navega por el aire aunque ninguna causa eficiente discernible actúe sobre ella. Aristóteles era consciente de este problema y propuso que el aire desplazado a lo largo de la trayectoria del proyectil lo lleva hasta su objetivo. Esta explicación requiere un medio continuo como el aire para sostener el movimiento. [8]
Aunque la física aristotélica fue criticada ya en el siglo VI, [9] [10] sus deficiencias no se corregirían hasta el trabajo del siglo XVII de Galileo Galilei , quien fue influenciado por la idea medieval tardía de que los objetos en movimiento forzado llevaban una fuerza innata. de impulso . Galileo construyó un experimento en el que se hacían rodar piedras y balas de cañón por una pendiente para refutar la teoría aristotélica del movimiento . Demostró que los cuerpos eran acelerados por la gravedad en un grado que era independiente de su masa y argumentó que los objetos retienen su velocidad a menos que actúe sobre ellos una fuerza, por ejemplo la fricción . [11] La idea de Galileo de que se necesita fuerza para cambiar el movimiento en lugar de mantenerlo, mejorada aún más por Isaac Beeckman , René Descartes y Pierre Gassendi , se convirtió en un principio clave de la física newtoniana. [12]
A principios del siglo XVII, antes de los Principia de Newton , el término "fuerza" ( latín : vis ) se aplicaba a muchos fenómenos físicos y no físicos, por ejemplo, la aceleración de un punto. Leibniz denominó vis viva (fuerza viva) al producto de una masa puntual por el cuadrado de su velocidad . El concepto moderno de fuerza corresponde al vis motrix (fuerza aceleradora) de Newton. [13]
Sir Isaac Newton describió el movimiento de todos los objetos utilizando los conceptos de inercia y fuerza. En 1687, Newton publicó su obra maestra, Philosophiæ Naturalis Principia Mathematica . [1] [14] En este trabajo, Newton estableció tres leyes del movimiento que han dominado la forma en que se describen las fuerzas en la física hasta el día de hoy. [14] Las formas precisas en que se expresan las leyes de Newton han evolucionado a la par de los nuevos enfoques matemáticos. [15]
La primera ley del movimiento de Newton establece que el comportamiento natural de un objeto en reposo es continuar estando en reposo, y el comportamiento natural de un objeto que se mueve a velocidad constante en línea recta es continuar moviéndose a esa velocidad constante a lo largo de esa línea recta. [14] Este último se deriva del primero debido al principio de que las leyes de la física son las mismas para todos los observadores inerciales , es decir, todos los observadores que no se sienten en movimiento. Un observador que se mueve en tándem con un objeto lo verá en reposo. Así, su comportamiento natural será permanecer en reposo respecto a ese observador, lo que significa que un observador que lo vea moverse a velocidad constante en línea recta verá que continúa haciéndolo. [16] : 1–7

Según la primera ley, el movimiento en línea recta con velocidad constante no necesita causa. Es el cambio de movimiento lo que requiere una causa, y la segunda ley de Newton proporciona la relación cuantitativa entre fuerza y cambio de movimiento. La segunda ley de Newton establece que la fuerza neta que actúa sobre un objeto es igual a la velocidad a la que su impulso cambia con el tiempo . Si la masa del objeto es constante, esta ley implica que la aceleración de un objeto es directamente proporcional a la fuerza neta que actúa sobre el objeto, está en la dirección de la fuerza neta y es inversamente proporcional a la masa del objeto. [17] : 204-207
Una declaración moderna de la segunda ley de Newton es una ecuación vectorial:
En aplicaciones de ingeniería comunes, la masa en un sistema permanece constante, lo que permite una forma algebraica simple para la segunda ley. Según la definición de impulso,
Siempre que un cuerpo ejerce una fuerza sobre otro, este último ejerce simultáneamente una fuerza igual y opuesta sobre el primero. En forma vectorial, si es la fuerza del cuerpo 1 sobre el cuerpo 2 y la del cuerpo 2 sobre el cuerpo 1, entonces
La Tercera Ley de Newton es el resultado de aplicar la simetría a situaciones en las que las fuerzas pueden atribuirse a la presencia de diferentes objetos. La tercera ley significa que todas las fuerzas son interacciones entre diferentes cuerpos. [18] [19] y, por lo tanto, que no existe una fuerza unidireccional o una fuerza que actúa sobre un solo cuerpo.
En un sistema compuesto por el objeto 1 y el objeto 2, la fuerza neta sobre el sistema debido a sus interacciones mutuas es cero:
Combinando la Segunda y Tercera Ley de Newton, es posible demostrar que el momento lineal de un sistema se conserva en cualquier sistema cerrado . En un sistema de dos partículas, si es el momento del objeto 1 y el momento del objeto 2, entonces
Algunos libros de texto utilizan la segunda ley de Newton como definición de fuerza. [20] [21] [22] [23] Sin embargo, para que la ecuación para una masa constante tenga algún contenido predictivo, debe combinarse con más información. [24] [4] : 12-1 Además, inferir que hay una fuerza presente porque un cuerpo está acelerando solo es válido en un marco de referencia inercial. [5] : 59 La pregunta de qué aspectos de las leyes de Newton tomar como definiciones y cuáles considerar como contenidos físicos ha sido respondida de varias maneras, [25] [26] : vii que en última instancia no afectan cómo se usa la teoría. en la práctica. [25] Entre los físicos, filósofos y matemáticos notables que han buscado una definición más explícita del concepto de fuerza se encuentran Ernst Mach y Walter Noll . [27] [28]

Las fuerzas actúan en una dirección particular y tienen tamaños que dependen de qué tan fuerte sea el empujón o el tirón. Por estas características, las fuerzas se clasifican como " magnitudes vectoriales ". Esto significa que las fuerzas siguen un conjunto de reglas matemáticas diferente al de las cantidades físicas que no tienen dirección (denotadas cantidades escalares ). Por ejemplo, a la hora de determinar qué sucede cuando dos fuerzas actúan sobre el mismo objeto, es necesario conocer tanto la magnitud como la dirección de ambas fuerzas para calcular el resultado . Si no se conocen estos dos datos para cada fuerza, la situación es ambigua. [17] : 197
Históricamente, las fuerzas se investigaron cuantitativamente por primera vez en condiciones de equilibrio estático donde varias fuerzas se anulaban entre sí. Tales experimentos demuestran las propiedades cruciales de que las fuerzas son cantidades vectoriales aditivas : tienen magnitud y dirección. [1] Cuando dos fuerzas actúan sobre una partícula puntual , la fuerza resultante, la resultante (también llamada fuerza neta ), se puede determinar siguiendo la regla del paralelogramo de la suma de vectores : la suma de dos vectores representados por los lados de un paralelogramo, da un vector resultante equivalente que es igual en magnitud y dirección a la transversal del paralelogramo. La magnitud de la resultante varía desde la diferencia de las magnitudes de las dos fuerzas hasta su suma, dependiendo del ángulo entre sus líneas de acción. [4] : capítulo 12 [5]

Los diagramas de cuerpo libre se pueden utilizar como una forma conveniente de realizar un seguimiento de las fuerzas que actúan sobre un sistema. Idealmente, estos diagramas se dibujan conservando los ángulos y las magnitudes relativas de los vectores de fuerza para que se pueda realizar una suma gráfica de vectores para determinar la fuerza neta. [29]
Además de sumarse, las fuerzas también se pueden descomponer en componentes independientes en ángulo recto entre sí. Por lo tanto, una fuerza horizontal que apunta al noreste se puede dividir en dos fuerzas, una que apunta al norte y otra que apunta al este. La suma de estas fuerzas componentes mediante la suma de vectores produce la fuerza original. Resolver los vectores de fuerza en componentes de un conjunto de vectores base es a menudo una forma matemáticamente más limpia de describir fuerzas que usar magnitudes y direcciones. [30] Esto se debe a que, para componentes ortogonales , los componentes de la suma vectorial están determinados únicamente por la suma escalar de los componentes de los vectores individuales. Las componentes ortogonales son independientes entre sí porque las fuerzas que actúan a noventa grados entre sí no tienen efecto sobre la magnitud o dirección de la otra. La elección de un conjunto de vectores de base ortogonales a menudo se realiza considerando qué conjunto de vectores de base hará que las matemáticas sean más convenientes. Es deseable elegir un vector base que esté en la misma dirección que una de las fuerzas, ya que esa fuerza tendría entonces solo un componente distinto de cero. Los vectores de fuerza ortogonales pueden ser tridimensionales y el tercer componente forma ángulo recto con los otros dos. [4] : capítulo 12 [5]
Cuando todas las fuerzas que actúan sobre un objeto están equilibradas, entonces se dice que el objeto está en estado de equilibrio . [17] : 566 Por lo tanto, el equilibrio ocurre cuando la fuerza resultante que actúa sobre una partícula puntual es cero (es decir, la suma vectorial de todas las fuerzas es cero). Cuando se trata de un cuerpo extendido, también es necesario que el par neto sea cero. Un cuerpo está en equilibrio estático con respecto a un sistema de referencia si está en reposo y no acelera, mientras que un cuerpo en equilibrio dinámico se mueve a velocidad constante en línea recta, es decir, se mueve pero no acelera. Lo que un observador ve como equilibrio estático, otro puede verlo como equilibrio dinámico y viceversa. [17] : 566
El equilibrio estático se entendía mucho antes de la invención de la mecánica clásica. Los objetos que están en reposo tienen una fuerza neta nula que actúa sobre ellos. [31]
El caso más simple de equilibrio estático ocurre cuando dos fuerzas son iguales en magnitud pero opuestas en dirección. Por ejemplo, un objeto en una superficie nivelada es arrastrado (atraído) hacia el centro de la Tierra por la fuerza de gravedad. Al mismo tiempo, la superficie aplica una fuerza que resiste la fuerza hacia abajo con igual fuerza hacia arriba (llamada fuerza normal ). La situación produce fuerza neta cero y, por tanto, ninguna aceleración. [1]
Empujar contra un objeto que descansa sobre una superficie de fricción puede resultar en una situación en la que el objeto no se mueve porque la fuerza aplicada se opone a la fricción estática , generada entre el objeto y la superficie de la mesa. Para una situación sin movimiento, la fuerza de fricción estática equilibra exactamente la fuerza aplicada, lo que no produce aceleración. La fricción estática aumenta o disminuye en respuesta a la fuerza aplicada hasta un límite superior determinado por las características del contacto entre la superficie y el objeto. [1]
Un equilibrio estático entre dos fuerzas es la forma más habitual de medir fuerzas, utilizando dispositivos sencillos como balanzas y balanzas de resorte . Por ejemplo, un objeto suspendido sobre una báscula de resorte vertical experimenta la fuerza de gravedad que actúa sobre el objeto equilibrado por una fuerza aplicada por la "fuerza de reacción del resorte", que es igual al peso del objeto. Utilizando tales herramientas, se descubrieron algunas leyes de fuerza cuantitativa: que la fuerza de gravedad es proporcional al volumen para objetos de densidad constante (ampliamente explotada durante milenios para definir pesos estándar); Principio de Arquímedes para la flotabilidad; Análisis de Arquímedes de la palanca ; Ley de Boyle para la presión del gas; y la ley de Hooke para resortes. Todas ellas fueron formuladas y verificadas experimentalmente antes de que Isaac Newton expusiera sus Tres Leyes del Movimiento . [1] [4] : capítulo 12 [5]

El equilibrio dinámico fue descrito por primera vez por Galileo, quien notó que ciertas suposiciones de la física aristotélica estaban contradichas por las observaciones y la lógica . Galileo se dio cuenta de que la simple suma de velocidades exige que el concepto de " marco en reposo absoluto " no exista. Galileo concluyó que el movimiento a velocidad constante era completamente equivalente al reposo. Esto era contrario a la noción de Aristóteles de un "estado natural" de reposo al que los objetos con masa se acercaban naturalmente. Experimentos simples demostraron que la comprensión de Galileo sobre la equivalencia de velocidad constante y reposo era correcta. Por ejemplo, si un marinero dejaba caer una bala de cañón desde la cofa de un barco que se movía a velocidad constante, la física aristotélica haría que la bala cayera hacia abajo mientras el barco se movía debajo de ella. Así, en un universo aristotélico, la bala de cañón caería detrás del pie del mástil de un barco en movimiento. Cuando realmente se realiza este experimento, la bala de cañón siempre cae al pie del mástil, como si supiera viajar con el barco a pesar de estar separada de él. Dado que no se aplica ninguna fuerza horizontal hacia adelante sobre la bala de cañón mientras cae, la única conclusión que queda es que la bala de cañón continúa moviéndose con la misma velocidad que el bote mientras cae. Por lo tanto, no se requiere fuerza para mantener la bala de cañón moviéndose a velocidad constante de avance. [11]
Además, cualquier objeto que viaje a velocidad constante debe estar sujeto a una fuerza neta cero (fuerza resultante). Esta es la definición de equilibrio dinámico: cuando todas las fuerzas sobre un objeto se equilibran pero aún se mueve a una velocidad constante. Un caso simple de equilibrio dinámico ocurre en un movimiento a velocidad constante a través de una superficie con fricción cinética . En tal situación, se aplica una fuerza en la dirección del movimiento mientras que la fuerza de fricción cinética se opone exactamente a la fuerza aplicada. Esto da como resultado una fuerza neta cero, pero como el objeto comenzó con una velocidad distinta de cero, continúa moviéndose con una velocidad distinta de cero. Aristóteles malinterpretó este movimiento como causado por la fuerza aplicada. Cuando se toma en consideración la fricción cinética, queda claro que no existe una fuerza neta que cause un movimiento a velocidad constante. [4] : capítulo 12 [5]
Algunas fuerzas son consecuencias de las fundamentales. En tales situaciones, se pueden utilizar modelos idealizados para obtener información física. Por ejemplo, cada objeto sólido se considera un cuerpo rígido . [ cita necesaria ]

Lo que ahora llamamos gravedad no fue identificado como una fuerza universal hasta el trabajo de Isaac Newton. Antes de Newton, no se entendía que la tendencia de los objetos a caer hacia la Tierra estuviera relacionada con los movimientos de los objetos celestes. Galileo jugó un papel decisivo en la descripción de las características de los objetos que caen al determinar que la aceleración de cada objeto en caída libre era constante e independiente de la masa del objeto. Hoy en día, esta aceleración debida a la gravedad hacia la superficie de la Tierra suele denominarse y tiene una magnitud de unos 9,81 metros por segundo al cuadrado (esta medida se toma desde el nivel del mar y puede variar según la ubicación), y apunta hacia el centro de la Tierra. la tierra. [32] Esta observación significa que la fuerza de gravedad sobre un objeto en la superficie de la Tierra es directamente proporcional a la masa del objeto. Así, un objeto que tiene una masa de experimentará una fuerza:
Para un objeto en caída libre, esta fuerza no tiene oposición y la fuerza neta sobre el objeto es su peso. Para los objetos que no están en caída libre, la fuerza de gravedad se opone a las fuerzas de reacción aplicadas por sus soportes. Por ejemplo, una persona parada en el suelo experimenta una fuerza neta cero, ya que el suelo ejerce una fuerza normal (una fuerza de reacción) hacia arriba sobre la persona que contrarresta su peso dirigido hacia abajo. [4] : capítulo 12 [5]
La contribución de Newton a la teoría gravitacional fue unificar los movimientos de los cuerpos celestes, que Aristóteles había supuesto que estaban en un estado natural de movimiento constante, con el movimiento descendente observado en la Tierra. Propuso una ley de gravedad que podría explicar los movimientos celestes que se habían descrito anteriormente utilizando las leyes del movimiento planetario de Kepler . [33]
Newton se dio cuenta de que los efectos de la gravedad podían observarse de diferentes maneras a distancias mayores. En particular, Newton determinó que la aceleración de la Luna alrededor de la Tierra podría atribuirse a la misma fuerza de gravedad si la aceleración debida a la gravedad disminuyera como una ley del cuadrado inverso . Además, Newton se dio cuenta de que la aceleración de un cuerpo debida a la gravedad es proporcional a la masa del otro cuerpo que se atrae. [33] Combinando estas ideas se obtiene una fórmula que relaciona la masa ( ) y el radio ( ) de la Tierra con la aceleración gravitacional:
En esta ecuación, se utiliza una constante dimensional para describir la fuerza relativa de la gravedad. Esta constante ha llegado a ser conocida como la constante newtoniana de gravitación , aunque su valor era desconocido durante la vida de Newton. No fue hasta 1798 que Henry Cavendish pudo realizar la primera medición utilizando una balanza de torsión ; esto fue ampliamente informado en la prensa como una medida de la masa de la Tierra, ya que conocerla podría permitir resolver la masa de la Tierra dada la ecuación anterior. Newton se dio cuenta de que, dado que todos los cuerpos celestes seguían las mismas leyes de movimiento , su ley de gravedad tenía que ser universal. En pocas palabras, la ley de gravitación de Newton establece que la fuerza sobre un objeto esférico de masa debido a la atracción gravitacional de la masa es
Esta fórmula fue lo suficientemente poderosa como para servir de base para todas las descripciones posteriores del movimiento dentro del sistema solar hasta el siglo XX. Durante ese tiempo, se inventaron métodos sofisticados de análisis de perturbaciones [34] para calcular las desviaciones de las órbitas debido a la influencia de múltiples cuerpos en un planeta , luna , cometa o asteroide . El formalismo era lo suficientemente exacto como para permitir a los matemáticos predecir la existencia del planeta Neptuno antes de que fuera observado. [35]
La fuerza electrostática fue descrita por primera vez en 1784 por Coulomb como una fuerza que existía intrínsecamente entre dos cargas . [36] : 519 Las propiedades de la fuerza electrostática eran que variaba como una ley del cuadrado inverso dirigida en la dirección radial , era a la vez atractiva y repulsiva (había polaridad intrínseca ), era independiente de la masa de los objetos cargados y seguía el principio de superposición . La ley de Coulomb unifica todas estas observaciones en una declaración sucinta. [37]
Los matemáticos y físicos posteriores descubrieron que la construcción del campo eléctrico era útil para determinar la fuerza electrostática sobre una carga eléctrica en cualquier punto del espacio. El campo eléctrico se basó en el uso de una " carga de prueba " hipotética en cualquier lugar del espacio y luego en la ley de Coulomb para determinar la fuerza electrostática. [38] : 4-6–4-8 Por lo tanto, el campo eléctrico en cualquier lugar del espacio se define como
El origen de los campos eléctricos y magnéticos no se explicaría completamente hasta 1864, cuando James Clerk Maxwell unificó varias teorías anteriores en un conjunto de 20 ecuaciones escalares, que luego fueron reformuladas en 4 ecuaciones vectoriales por Oliver Heaviside y Josiah Willard Gibbs . [41] Estas " ecuaciones de Maxwell " describían completamente las fuentes de los campos como cargas estacionarias y en movimiento, y las interacciones de los campos mismos. Esto llevó a Maxwell a descubrir que los campos eléctricos y magnéticos podían "autogenerarse" a través de una onda que viajaba a una velocidad que calculó que era la velocidad de la luz . Esta idea unió los campos nacientes de la teoría electromagnética con la óptica y condujo directamente a una descripción completa del espectro electromagnético . [42]
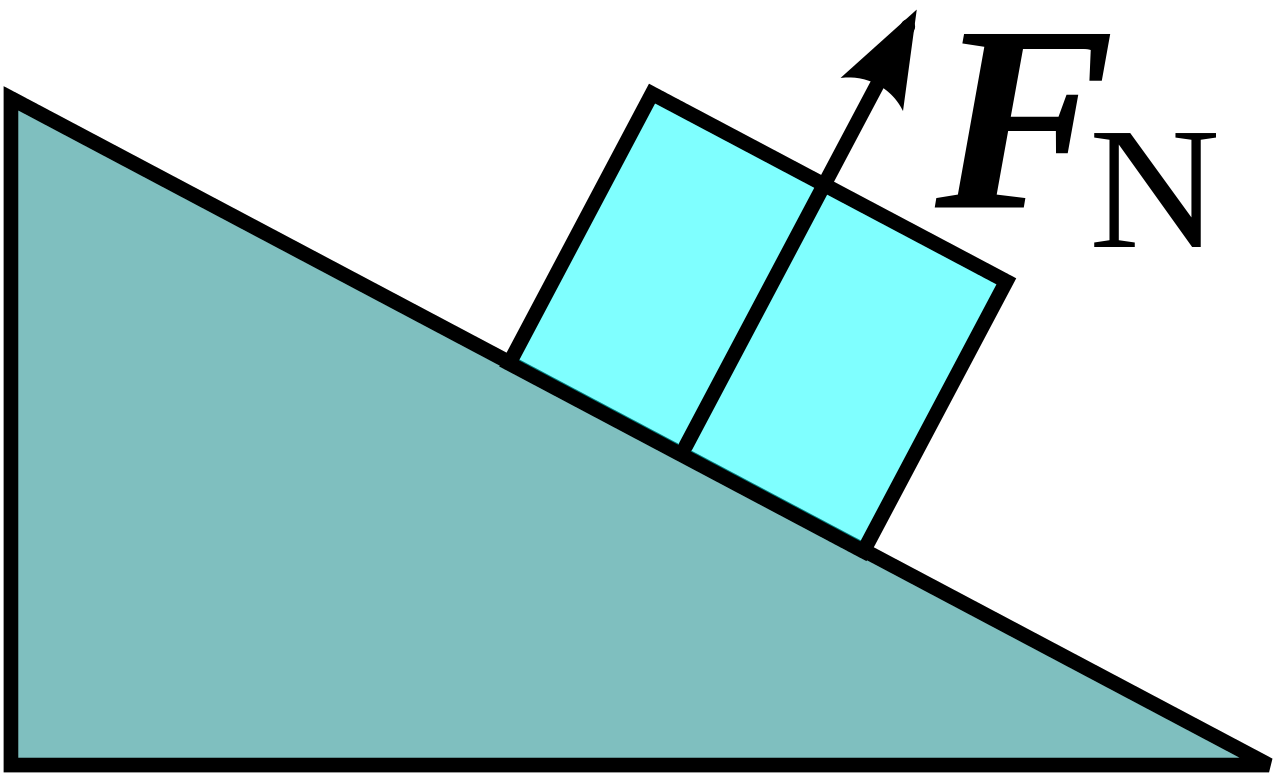
Cuando los objetos están en contacto, la fuerza directamente entre ellos se llama fuerza normal, el componente de la fuerza total en el sistema ejercida normal a la interfaz entre los objetos. [36] : 264 La fuerza normal está estrechamente relacionada con la tercera ley de Newton. La fuerza normal, por ejemplo, es responsable de la integridad estructural de mesas y pisos, además de ser la fuerza que responde cada vez que una fuerza externa empuja un objeto sólido. Un ejemplo de la fuerza normal en acción es la fuerza de impacto sobre un objeto que choca contra una superficie inmóvil. [4] : capítulo 12 [5]
La fricción es una fuerza que se opone al movimiento relativo de dos cuerpos. A escala macroscópica, la fuerza de fricción está directamente relacionada con la fuerza normal en el punto de contacto. Hay dos clasificaciones amplias de fuerzas de fricción: fricción estática y fricción cinética . [17] : 267
La fuerza de fricción estática ( ) se opondrá exactamente a las fuerzas aplicadas a un objeto paralelo a una superficie hasta el límite especificado por el coeficiente de fricción estática ( ) multiplicado por la fuerza normal ( ). En otras palabras, la magnitud de la fuerza de fricción estática satisface la desigualdad:
La fuerza de fricción cinética ( ) suele ser independiente tanto de las fuerzas aplicadas como del movimiento del objeto. Por tanto, la magnitud de la fuerza es igual a:
donde es el coeficiente de fricción cinética . El coeficiente de fricción cinética normalmente es menor que el coeficiente de fricción estática. [17] : 267–271
Las fuerzas de tensión se pueden modelar utilizando cuerdas ideales que no tengan masa, no tengan fricción, sean irrompibles y no se estiren. Se pueden combinar con poleas ideales , que permiten que las cuerdas ideales cambien de dirección física. Las cuerdas ideales transmiten fuerzas de tensión instantáneamente en pares de acción-reacción, de modo que si dos objetos están conectados por una cuerda ideal, cualquier fuerza dirigida a lo largo de la cuerda por el primer objeto va acompañada de una fuerza dirigida a lo largo de la cuerda en dirección opuesta por el segundo objeto. . [43] Al conectar la misma cuerda varias veces al mismo objeto mediante el uso de una configuración que utiliza poleas móviles, la fuerza de tensión sobre una carga se puede multiplicar. Por cada cuerda que actúa sobre una carga, otro factor de la fuerza de tensión en la cuerda actúa sobre la carga. Tales máquinas ofrecen una ventaja mecánica para un aumento correspondiente en la longitud de la cuerda desplazada necesaria para mover la carga. Estos efectos en tándem dan como resultado en última instancia la conservación de la energía mecánica, ya que el trabajo realizado sobre la carga es el mismo sin importar cuán complicada sea la máquina. [4] : capítulo 12 [5] [44]

Una fuerza elástica simple actúa para devolver un resorte a su longitud natural. Se considera que un resorte ideal no tiene masa, no tiene fricción, es irrompible e infinitamente estirable. Estos resortes ejercen fuerzas que empujan cuando se contraen o tiran cuando se extienden, en proporción al desplazamiento del resorte desde su posición de equilibrio. [45] Esta relación lineal fue descrita por Robert Hooke en 1676, de quien lleva el nombre la ley de Hooke . Si es el desplazamiento, la fuerza ejercida por un resorte ideal es igual a:
Para un objeto en movimiento circular uniforme , la fuerza neta que actúa sobre el objeto es igual a: [46]

Las leyes de Newton y la mecánica newtoniana en general se desarrollaron por primera vez para describir cómo las fuerzas afectan a las partículas puntuales idealizadas en lugar de a los objetos tridimensionales. En la vida real, la materia tiene una estructura extendida y las fuerzas que actúan sobre una parte de un objeto pueden afectar a otras partes de un objeto. Para situaciones en las que la red que mantiene unidos los átomos de un objeto puede fluir, contraerse, expandirse o cambiar de forma, las teorías de la mecánica continua describen la forma en que las fuerzas afectan el material. Por ejemplo, en fluidos extendidos , las diferencias de presión dan como resultado fuerzas que se dirigen a lo largo de los gradientes de presión de la siguiente manera:
donde es el volumen del objeto en el fluido y es la función escalar que describe la presión en todos los lugares del espacio. Los gradientes y diferenciales de presión dan como resultado la fuerza de flotación de los fluidos suspendidos en campos gravitacionales, los vientos en la ciencia atmosférica y la sustentación asociada con la aerodinámica y el vuelo . [4] : capítulo 12 [5]
Un ejemplo específico de dicha fuerza asociada con la presión dinámica es la resistencia del fluido: una fuerza corporal que resiste el movimiento de un objeto a través de un fluido debido a la viscosidad . Para el llamado " arrastre de Stokes ", la fuerza es aproximadamente proporcional a la velocidad, pero de dirección opuesta:
Más formalmente, las fuerzas en la mecánica continua se describen completamente mediante un tensor de tensión con términos que se definen aproximadamente como
Hay fuerzas que son dependientes del marco , es decir que aparecen debido a la adopción de marcos de referencia no newtonianos (es decir, no inerciales ) . Tales fuerzas incluyen la fuerza centrífuga y la fuerza de Coriolis . [47] Estas fuerzas se consideran ficticias porque no existen en marcos de referencia que no se estén acelerando. [4] : cap.12 [5] Debido a que estas fuerzas no son genuinas, también se las conoce como "pseudofuerzas". [4] : 12-11
En la relatividad general , la gravedad se convierte en una fuerza ficticia que surge en situaciones en las que el espacio-tiempo se desvía de una geometría plana. [48]
Las fuerzas que hacen que los objetos extendidos giren están asociadas con pares . Matemáticamente, el par de una fuerza se define con respecto a un punto de referencia arbitrario como el producto vectorial :
El par es el equivalente de rotación de la fuerza de la misma manera que el ángulo es el equivalente de rotación de la posición , la velocidad angular de la velocidad y el momento angular del momento . Como consecuencia de la primera ley del movimiento de Newton, existe una inercia rotacional que garantiza que todos los cuerpos mantengan su momento angular a menos que actúe sobre ellos un par de torsión desequilibrado. Asimismo, la segunda ley del movimiento de Newton se puede utilizar para derivar una ecuación análoga para la aceleración angular instantánea del cuerpo rígido:
Esto proporciona una definición del momento de inercia, que es el equivalente rotacional de la masa. En tratamientos más avanzados de mecánica, donde se describe la rotación durante un intervalo de tiempo, el momento de inercia debe ser sustituido por el tensor que, cuando se analiza adecuadamente, determina completamente las características de las rotaciones, incluidas la precesión y la nutación . [26] : 96-113
De manera equivalente, la forma diferencial de la Segunda Ley de Newton proporciona una definición alternativa de par: [49]
La Tercera Ley del Movimiento de Newton requiere que todos los objetos que ejercen pares experimenten pares iguales y opuestos, [50] y por lo tanto también implica directamente la conservación del momento angular para sistemas cerrados que experimentan rotaciones y revoluciones a través de la acción de pares internos.
El tirón se define como la tasa de cambio de fuerza [51] : 131
El término se utiliza en análisis biomecánico, [52] evaluación atlética [53] y control robótico. [54] El segundo (llamado "tirón"), el tercero ("arrancar"), el cuarto ("sacudir") y los derivados superiores rara vez se utilizan. [51]
Las fuerzas se pueden utilizar para definir una serie de conceptos físicos integrando con respecto a variables cinemáticas . Por ejemplo, integrando con respecto al tiempo da la definición de impulso : [55]
De manera similar, integrar con respecto a la posición da una definición del trabajo realizado por una fuerza: [4] : 13-3
La potencia P es la tasa de cambio d W /d t del trabajo W , a medida que la trayectoria se extiende por un cambio de posición en un intervalo de tiempo d t : [4] : 13-2
En lugar de fuerza, a menudo se utiliza el concepto matemáticamente relacionado de campo de energía potencial . Por ejemplo, la fuerza gravitacional que actúa sobre un objeto puede verse como la acción del campo gravitacional presente en la ubicación del objeto. Retomando matemáticamente la definición de energía (a través de la definición de trabajo ), un campo escalar potencial se define como aquel campo cuyo gradiente es igual y opuesto a la fuerza producida en cada punto:
Las fuerzas se pueden clasificar en conservadoras o no conservadoras. Las fuerzas conservativas son equivalentes al gradiente de un potencial , mientras que las fuerzas no conservativas no lo son. [4] : capítulo 12 [5]
Una fuerza conservativa que actúa sobre un sistema cerrado tiene un trabajo mecánico asociado que permite que la energía se convierta sólo entre formas cinéticas o potenciales . Esto significa que para un sistema cerrado, la energía mecánica neta se conserva siempre que una fuerza conservativa actúa sobre el sistema. La fuerza, por lo tanto, está relacionada directamente con la diferencia de energía potencial entre dos lugares diferentes en el espacio, [56] y puede considerarse como un artefacto del campo potencial de la misma manera que la dirección y cantidad de un flujo de agua. Puede considerarse un artefacto del mapa de contorno de la elevación de un área. [4] : capítulo 12 [5]
Las fuerzas conservativas incluyen la gravedad , la fuerza electromagnética y la fuerza del resorte . Cada una de estas fuerzas tiene modelos que dependen de una posición dada a menudo como un vector radial que emana de potenciales esféricamente simétricos . [57] Ejemplos de esto son los siguientes:
Por gravedad:
Para fuerzas electrostáticas:
Para fuerzas de resorte:
Para ciertos escenarios físicos, es imposible modelar fuerzas como debidas a un simple gradiente de potenciales. Esto se debe a menudo a un promedio estadístico macroscópico de microestados . Por ejemplo, la fricción estática es causada por los gradientes de numerosos potenciales electrostáticos entre los átomos , pero se manifiesta como un modelo de fuerza que es independiente de cualquier vector de posición a macroescala. Las fuerzas no conservativas distintas de la fricción incluyen otras fuerzas de contacto , tensión , compresión y arrastre . Para cualquier descripción suficientemente detallada, todas estas fuerzas son el resultado de fuerzas conservadoras, ya que cada una de estas fuerzas macroscópicas es el resultado neto de los gradientes de potenciales microscópicos. [4] : capítulo 12 [5]
La conexión entre fuerzas macroscópicas no conservativas y fuerzas microscópicas conservadoras se describe mediante un tratamiento detallado con mecánica estadística . En sistemas macroscópicos cerrados, las fuerzas no conservativas actúan para cambiar las energías internas del sistema y, a menudo, están asociadas con la transferencia de calor. Según la Segunda ley de la termodinámica , las fuerzas no conservativas necesariamente resultan en transformaciones de energía dentro de sistemas cerrados desde condiciones ordenadas a condiciones más aleatorias a medida que aumenta la entropía . [4] : capítulo 12 [5]
La unidad de fuerza del SI es el newton (símbolo N), que es la fuerza necesaria para acelerar una masa de un kilogramo a razón de un metro por segundo al cuadrado, o kg·m·s −2 . La unidad CGS correspondiente es la dina. , la fuerza requerida para acelerar una masa de un gramo en un centímetro por segundo al cuadrado, o g·cm·s −2 . Por tanto, un newton equivale a 100.000 dinas. [58]
La unidad inglesa de fuerza gravitacional pie-libra-segundo es la libra-fuerza (lbf), definida como la fuerza ejercida por la gravedad sobre una libra-masa en el campo gravitacional estándar de 9,80665 m·s −2 . [58] La libra de fuerza proporciona una unidad de masa alternativa: un slug es la masa que acelerará un pie por segundo al cuadrado cuando actúa sobre ella una libra de fuerza. [58] Una unidad de fuerza alternativa en un sistema diferente de pie-libra-segundo, el sistema absoluto de fps, es el libra , definido como la fuerza requerida para acelerar una masa de una libra a una velocidad de un pie por segundo al cuadrado. [58]
La libra fuerza tiene una contraparte métrica, menos utilizada que el newton: el kilogramo fuerza (kgf) (a veces kilopondio), es la fuerza ejercida por la gravedad estándar sobre un kilogramo de masa. El kilogramo-fuerza conduce a una unidad de masa alternativa, pero rara vez utilizada: el slug métrico (a veces mug o hyl) es esa masa que acelera a 1 m·s −2 cuando se somete a una fuerza de 1 kgf. El kilogramo-fuerza no forma parte del sistema SI moderno y, en general, está en desuso; a veces se utiliza para expresar el peso de un avión, el empuje del jet, la tensión de los radios de la bicicleta, los ajustes de la llave dinamométrica y el par de salida del motor. [58]
A principios del siglo XX surgieron nuevas ideas físicas para explicar los resultados experimentales en los ámbitos astronómico y submicroscópico. Como se analiza más adelante, la relatividad altera la definición de impulso y la mecánica cuántica reutiliza el concepto de "fuerza" en contextos microscópicos donde las leyes de Newton no se aplican directamente.
En la teoría especial de la relatividad , masa y energía son equivalentes (como se puede comprobar calculando el trabajo necesario para acelerar un objeto). Cuando la velocidad de un objeto aumenta, también aumenta su energía y, por tanto, su masa equivalente (inercia). Por lo tanto, se requiere más fuerza para acelerarlo en la misma cantidad que a menor velocidad. Segunda ley de Newton,
La expresión que relaciona la fuerza y la aceleración para una partícula con masa en reposo constante distinta de cero que se mueve en la dirección a la velocidad es: [59] : 216
La teoría general de la relatividad incorpora una desviación más radical de la forma newtoniana de pensar sobre la fuerza, específicamente la fuerza gravitacional. Esta reinvención de la naturaleza de la gravedad se describe con más detalle a continuación.
La mecánica cuántica es una teoría de la física desarrollada originalmente para comprender los fenómenos microscópicos: el comportamiento a escala de moléculas, átomos o partículas subatómicas. En términos generales y generales, cuanto más pequeño es un sistema, más requerirá un modelo matemático adecuado para comprender los efectos cuánticos. El fundamento conceptual de la física cuántica es diferente del de la física clásica. En lugar de pensar en cantidades como la posición, el momento y la energía como propiedades que tiene un objeto , uno considera qué resultado podría aparecer cuando se realiza una medición de un tipo elegido. La mecánica cuántica permite al físico calcular la probabilidad de que una medición elegida produzca un resultado particular. [61] [62] El valor esperado para una medición es el promedio de los posibles resultados que podría arrojar, ponderados por sus probabilidades de ocurrencia. [63]
En mecánica cuántica, las interacciones normalmente se describen en términos de energía más que de fuerza. El teorema de Ehrenfest proporciona una conexión entre los valores esperados cuánticos y el concepto clásico de fuerza, una conexión que es necesariamente inexacta, ya que la física cuántica es fundamentalmente diferente de la clásica. En física cuántica, la regla de Born se utiliza para calcular los valores esperados de una medición de posición o de una medición de momento. Estos valores esperados generalmente cambiarán con el tiempo; es decir, dependiendo del momento en el que (por ejemplo) se realiza una medición de posición, las probabilidades de sus diferentes resultados posibles variarán. El teorema de Ehrenfest dice, en términos generales, que las ecuaciones que describen cómo estos valores esperados cambian con el tiempo tienen una forma que recuerda a la segunda ley de Newton, con una fuerza definida como la derivada negativa de la energía potencial. Sin embargo, cuanto más pronunciados sean los efectos cuánticos en una situación determinada, más difícil será derivar conclusiones significativas de esta semejanza. [64] [65]
La mecánica cuántica también introduce dos nuevas limitaciones que interactúan con fuerzas a escala submicroscópica y que son especialmente importantes para los átomos. A pesar de la fuerte atracción del núcleo, el principio de incertidumbre limita la extensión mínima de una distribución de probabilidad de un electrón [66] y el principio de exclusión de Pauli evita que los electrones compartan la misma distribución de probabilidad. [67] Esto da lugar a una presión emergente conocida como presión de degeneración . El equilibrio dinámico entre la presión de degeneración y la fuerza electromagnética de atracción da estabilidad a los átomos, moléculas, líquidos y sólidos . [68]

En la física de partículas moderna , las fuerzas y la aceleración de las partículas se explican como un subproducto matemático del intercambio de bosones calibre portadores de momento . Con el desarrollo de la teoría cuántica de campos y la relatividad general , se comprendió que la fuerza es un concepto redundante que surge de la conservación del momento ( momento 4 en relatividad y momento de partículas virtuales en electrodinámica cuántica ). La conservación del impulso puede derivarse directamente de la homogeneidad o simetría del espacio y, por lo tanto, suele considerarse más fundamental que el concepto de fuerza. Por lo tanto, las fuerzas fundamentales actualmente conocidas se consideran más exactamente " interacciones fundamentales ". [6] : 199-128
Si bien se necesitan descripciones matemáticas sofisticadas para predecir, con todo detalle, el resultado de tales interacciones, existe una manera conceptualmente simple de describirlas mediante el uso de diagramas de Feynman . En un diagrama de Feynman, cada partícula de materia se representa como una línea recta (ver línea mundial ) que viaja a través del tiempo, que normalmente aumenta hacia arriba o hacia la derecha en el diagrama. Las partículas de materia y antimateria son idénticas excepto por su dirección de propagación a través del diagrama de Feynman. Las líneas mundiales de partículas se cruzan en los vértices de interacción , y el diagrama de Feynman representa cualquier fuerza que surja de una interacción que ocurre en el vértice con un cambio instantáneo asociado en la dirección de las líneas mundiales de partículas. Los bosones de calibre se emiten lejos del vértice como líneas onduladas y, en el caso de intercambio virtual de partículas, se absorben en un vértice adyacente. [69] La utilidad de los diagramas de Feynman es que otros tipos de fenómenos físicos que forman parte de la imagen general de las interacciones fundamentales pero que están conceptualmente separados de las fuerzas también pueden describirse utilizando las mismas reglas. Por ejemplo, un diagrama de Feynman puede describir con sucinto detalle cómo un neutrón se desintegra en un electrón , un protón y un antineutrino , una interacción mediada por el mismo bosón de calibre que es responsable de la fuerza nuclear débil . [69]
Todas las fuerzas conocidas del universo se clasifican en cuatro interacciones fundamentales . Las fuerzas fuerte y débil actúan sólo a distancias muy cortas y son responsables de las interacciones entre partículas subatómicas , incluidos los nucleones y los núcleos compuestos . La fuerza electromagnética actúa entre cargas eléctricas y la fuerza gravitacional actúa entre masas . Todas las demás fuerzas de la naturaleza se derivan de estas cuatro interacciones fundamentales que operan dentro de la mecánica cuántica , incluidas las limitaciones introducidas por la ecuación de Schrödinger y el principio de exclusión de Pauli . [67] Por ejemplo, la fricción es una manifestación de la fuerza electromagnética que actúa entre átomos de dos superficies. Las fuerzas en los resortes , modeladas por la ley de Hooke , también son resultado de fuerzas electromagnéticas. Las fuerzas centrífugas son fuerzas de aceleración que surgen simplemente de la aceleración de sistemas de referencia giratorios . [4] : 12-11 [5] : 359
Las teorías fundamentales de las fuerzas se desarrollaron a partir de la unificación de diferentes ideas. Por ejemplo, la teoría universal de la gravitación de Newton demostró que la fuerza responsable de la caída de los objetos cerca de la superficie de la Tierra es también la fuerza responsable de la caída de los cuerpos celestes alrededor de la Tierra (la Luna ) y alrededor del Sol (los planetas). Michael Faraday y James Clerk Maxwell demostraron que las fuerzas eléctricas y magnéticas estaban unificadas mediante una teoría del electromagnetismo. En el siglo XX, el desarrollo de la mecánica cuántica llevó a una comprensión moderna de que las tres primeras fuerzas fundamentales (todas excepto la gravedad) son manifestaciones de materia ( fermiones ) que interactúan mediante el intercambio de partículas virtuales llamadas bosones de calibre . [70] Este modelo estándar de física de partículas supone una similitud entre las fuerzas y llevó a los científicos a predecir la unificación de las fuerzas débiles y electromagnéticas en la teoría electrodébil , lo que posteriormente fue confirmado por observación. [71]

La ley de gravitación de Newton es un ejemplo de acción a distancia : un cuerpo, como el Sol, ejerce una influencia sobre cualquier otro cuerpo, como la Tierra, por muy lejos que estén. Además, esta acción a distancia es instantánea. Según la teoría de Newton, el cambio de posición de un cuerpo cambia la atracción gravitacional que sienten todos los demás cuerpos, todos en el mismo instante de tiempo. Albert Einstein reconoció que esto era inconsistente con la relatividad especial y su predicción de que las influencias no pueden viajar más rápido que la velocidad de la luz . Entonces, buscó una nueva teoría de la gravitación que fuera relativistamente consistente. [74] [75] La órbita de Mercurio no coincidía con la predicha por la ley de gravitación de Newton. Algunos astrofísicos predijeron la existencia de un planeta no descubierto ( Vulcano ) que podría explicar las discrepancias. Cuando Einstein formuló su teoría de la relatividad general (GR), se centró en la problemática órbita de Mercurio y descubrió que su teoría añadía una corrección que podría explicar la discrepancia . Esta fue la primera vez que se demostró que la teoría de la gravedad de Newton era inexacta. [76]
Desde entonces, la relatividad general ha sido reconocida como la teoría que mejor explica la gravedad. En GR, la gravitación no se ve como una fuerza, sino que los objetos que se mueven libremente en campos gravitacionales viajan bajo su propia inercia en líneas rectas a través del espacio-tiempo curvo , definido como el camino espacio-temporal más corto entre dos eventos espacio-temporales. Desde la perspectiva del objeto, todo movimiento ocurre como si no existiera gravitación alguna. Sólo cuando se observa el movimiento en un sentido global se puede observar la curvatura del espacio-tiempo y se puede inferir la fuerza a partir de la trayectoria curva del objeto. Por lo tanto, la trayectoria en línea recta en el espacio-tiempo se ve como una línea curva en el espacio y se denomina trayectoria balística del objeto. Por ejemplo, una pelota de baloncesto lanzada desde el suelo se mueve en parábola , como ocurre en un campo gravitacional uniforme. Su trayectoria espacio-temporal es casi una línea recta, ligeramente curvada (con un radio de curvatura del orden de unos pocos años luz ). La derivada temporal del impulso cambiante del objeto es lo que llamamos "fuerza gravitacional". [5]
Las ecuaciones de Maxwell y el conjunto de técnicas construidas en torno a ellas describen adecuadamente una amplia gama de física que involucra la fuerza en la electricidad y el magnetismo. Esta teoría clásica ya incluye efectos de relatividad. [77] Comprender las interacciones electromagnéticas cuantificadas entre partículas elementales requiere electrodinámica cuántica (o QED). En QED, los fotones son partículas de intercambio fundamentales que describen todas las interacciones relacionadas con el electromagnetismo, incluida la fuerza electromagnética. [78]
Hay dos "fuerzas nucleares", que hoy en día se suelen describir como interacciones que tienen lugar en las teorías cuánticas de la física de partículas. La fuerza nuclear fuerte es la fuerza responsable de la integridad estructural de los núcleos atómicos y recibe su nombre de su capacidad para superar la repulsión electromagnética entre protones. [36] : 940 [79]
Hoy en día se entiende que la fuerza fuerte representa las interacciones entre quarks y gluones como lo detalla la teoría de la cromodinámica cuántica (QCD). [80] La fuerza fuerte es la fuerza fundamental mediada por los gluones, que actúa sobre los quarks, antiquarks y los propios gluones. La fuerza fuerte sólo actúa directamente sobre partículas elementales. Se observa un residuo entre los hadrones (en particular, los nucleones en los núcleos atómicos), conocido como fuerza nuclear . Aquí la fuerza fuerte actúa indirectamente, transmitida como gluones que forman parte de los mesones virtuales pi y rho , los clásicos transmisores de la fuerza nuclear. El fracaso de muchas búsquedas de quarks libres ha demostrado que las partículas elementales afectadas no son directamente observables. Este fenómeno se llama confinamiento del color . [81] : 232
Única entre las interacciones fundamentales, la fuerza nuclear débil no crea estados vinculados. [82] La fuerza débil se debe al intercambio de los bosones pesados W y Z. Dado que la fuerza débil está mediada por dos tipos de bosones, se puede dividir en dos tipos de interacción o " vértices ": corriente cargada , que involucra los bosones W + y W − cargados eléctricamente , y corriente neutra , que involucra los bosones Z 0 eléctricamente neutros. . El efecto más conocido de la interacción débil es la desintegración beta (de los neutrones en los núcleos atómicos) y la radiactividad asociada . [36] : 951 Este es un tipo de interacción de corriente cargada. La palabra "débil" deriva del hecho de que la intensidad del campo es unas 10 13 veces menor que la de la fuerza fuerte . Aún así, es más fuerte que la gravedad en distancias cortas. También se ha desarrollado una teoría electrodébil consistente, que muestra que las fuerzas electromagnéticas y la fuerza débil son indistinguibles a temperaturas superiores a aproximadamente10 15 mil . [83] Tales temperaturas se produjeron en las colisiones de plasma en los primeros momentos del Big Bang . [82] : 201
Citando a Newton en los
Principia
: No es una acción por la que el Sol atrae a Júpiter y otra por la que Júpiter atrae al Sol; pero es una acción mediante la cual el Sol y Júpiter se esfuerzan mutuamente por acercarse.
Cualquier fuerza es sólo un aspecto de una interacción mutua entre dos cuerpos.
Es una doctrina cuántica fundamental que una medición, en general, no revela un valor preexistente de la propiedad medida.
el hecho de que si uno intenta comprimir una función de onda
en cualquier lugar
, la energía cinética aumentará. Este principio fue proporcionado por Sobolev (1938)...
La materia a granel es estable y tiene un volumen proporcional al número de partículas, debido al principio de exclusión de Pauli para los fermiones (es decir, los electrones). Efectivamente los electrones se comportan como un fluido con densidad de energía
, y esto limita la compresión provocada por las fuerzas electrostáticas de atracción.













































































