Las coordenadas cartesianas se usan por ejemplo para definir un sistema cartesiano o sistema de referencia respecto ya sea a un solo eje (línea recta), respecto a dos ejes (un plano, siendo así un sistema bidimensional) o respecto a tres ejes (en el espacio), perpendiculares entre sí (plano y espacio), que se cortan en un punto llamado origen de coordenadas.Las coordenadas cartesianas son también herramientas esenciales para la mayoría de las disciplinas aplicadas que tratan con geometría, incluyendo astronomía, física, ingeniería y muchas más.Se denominan coordenadas cartesianas en honor a René Descartes (1596-1650), el célebre filósofo y matemático francés que quiso fundamentar su pensamiento filosófico en el método de tomar un «punto de partida» evidente sobre el que edificaría todo el conocimiento.Estos comentaristas introdujeron varios conceptos a la vez que intentaban aclarar las ideas contenidas en la obra de Descartes.[1] El desarrollo del sistema de coordenadas cartesianas jugaría un papel fundamental en el desarrollo del cálculo por parte de Isaac Newton y Gottfried Wilhelm Leibniz.[2] La descripción del plano en dos coordenadas se generalizó posteriormente en el concepto de espacios vectoriales.Con un sistema de referencia conformado por dos rectas perpendiculares que se cortan en el origen , cada punto del plano puede "nombrarse" mediante dos números: (x, y), que son las coordenadas del punto, llamadas abscisa y ordenada, respectivamente, que son las distancias ortogonales de dicho punto respecto a los ejes cartesianos.Los ejes dividen el espacio en cuatro cuadrantes I, II, III y IV, en los que los signos de las coordenadas alternan de positivo a negativo (por ejemplo, las dos coordenadas del punto A serán positivas, mientras que las del punto B serán ambas negativas).La distancia entre dos puntos cualesquiera vendrá dada por la expresión: Aplicación del teorema de Pitágoras al triángulo rectángulo ABC.Un vector cualquiera AB se definirá restando, coordenada a coordenada, las del punto de origen de las del punto de destino: Evidentemente, el módulo del vector AB será la distancia dAB entre los puntos A y B antes calculada.Si tenemos un sistema de referencia formado por tres rectas perpendiculares entre sí (X, Y, Z) (abscisa, ordenada y cota), que se cortan en el origen (0, 0, 0), cada punto del espacio puede nombrarse mediante tres números: (x, y, z), denominados coordenadas del punto, que son las distancias ortogonales a los tres planos principales: los que contienen las parejas de ejes YZ, XZ e YX, respectivamente.Los planos de referencia XY (z = 0); XZ (y = 0); e YZ (x = 0) dividen el espacio en ocho octantes en los que, como en el caso anterior, los signos de las coordenadas pueden ser positivos o negativos.La generalización de las relaciones anteriores al caso espacial es inmediata considerando que ahora es necesaria una tercera coordenada (z) para definir la posición del punto.Las coordenadas del punto A serán: y el B: La distancia entre los puntos A y B será: El segmento AB será: Tanto en el caso plano como en el caso espacial pueden considerarse tres transformaciones elementales: traslación del origen, rotación alrededor de un eje y escalado., respecto al primero: y con una base ortonormal: Al cálculo de las coordenadas del punto A, respecto a este segundo sistema de referencia, girado respecto al primero, se llama rotación alrededor del origen, siendo su representación: Hay que tener en cuenta que el puntoEl valor de las coordenadas respecto a uno u otro sistema, sí son diferentes, y es lo que se pretende calcular.
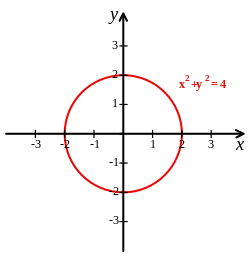
Sistema de coordenadas cartesianas con un círculo de radio 2 centrado en el origen marcado en rojo. La ecuación de un círculo es
(
x
-
a
)
2
+ (
y
-
b
)
2
=
r
2
donde
a
y
b
son las coordenadas del centro
(
a
,
b
)
y
r
es el radio.