Cardán
[1] Frente a otro tipo de articulaciones tiene la característica de ser una junta no homocinética; es decir, el eje al que se transmite el movimiento no gira a una velocidad angular constante.
La relación de transmisión instantánea oscila alrededor de la unidad, generando en el eje conducido una aceleración y un retraso por cada medio giro, cuya intensidad aumenta en función del ángulo formado por los árboles.
[2] Cuando es necesario proporcionar una velocidad de salida constante se utilizan juntas homocinéticas, cuyo tipo más simple está constituido precisamente por dos juntas cardánicas acopladas a un cuerpo común.
Las juntas homocinéticas Glaencer-Spicer también utilizan un sistema compacto de doble cardán.
[5] El mecanismo fue descrito más tarde en Technica curiosa sive mirabilia artis (1664) por Gaspar Schott, quien erróneamente afirmó que era una junta homocinética.
El primer uso registrado del término "unión universal" para este dispositivo fue realizado por Hooke en 1676, en su libro Helioscopios.
En 1841, el científico inglés Robert Willis analizó el movimiento de la articulación universal.
[14] En 1845, el ingeniero y matemático francés Jean-Victor Poncelet había analizado el movimiento de la articulación universal mediante trigonometría esférica.
[17] Charles Amidon utilizó una junta universal mucho más pequeña en su berbiquí patentado 1884.
[19] El término "junta de cardán" parece ser un préstamo en el idioma inglés.
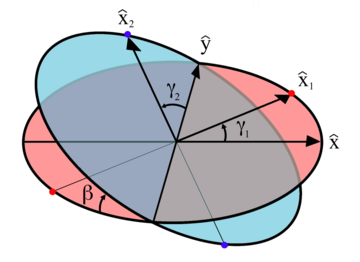
También se muestra un conjunto de coordenadas cartesianas fijo con vectores unitarios
Los dos ejes están unidos por un cardán que no se muestra.
Sin embargo, el eje 1 se une al cardán en los puntos rojos en el plano de rotación rojo en el diagrama, y el eje 2 se une en los puntos azules en el plano azul.
Los sistemas de coordenadas fijos con respecto a los ejes rotativos se definen teniendo sus vectores unitarios del eje x (
está confinado al "plano azul" en el diagrama y es el resultado del vector unitario en el eje x
es que, como están fijados en la suspensión cardán, deben permanecer en ángulos rectos entre ellos.
Esto es así cuando su producto escalar es igual a cero: Por lo tanto, la ecuación de movimiento que relaciona las dos posiciones angulares viene dada por: con una solución formal para
Por ejemplo, la siguiente solución explícita que utiliza la función atan2 (y, x) será válida para
: Como se muestra en las gráficas, las velocidades angulares no están relacionadas linealmente, sino que son periódicas, con un período de la mitad del de los ejes giratorios.
La ecuación de velocidad angular se puede diferenciar nuevamente para obtener la relación entre las aceleraciones angulares
Los cuatro extremos de la cruceta están montados sobre cojinetes encajados a presión en unos alojamientos en las horquillas y sujetos mediante bridas.
En estos sistemas suele emplearse un eje dividido en dos tramos para reducir el volumen del túnel de transmisión, siempre con dos juntas cardánicas, generalmente en el segundo tronco, y un flector a la salida de la caja de cambios para proporcionar un ligero efecto telescópico y absorber vibraciones.
Un uso secundario muy extendido está en las columnas de dirección colapsables.
En este sistema el árbol está sometido a unos requerimientos cinemáticos muy elevados, puesto que debe seguir el movimiento del diferencial integrado en el puente trasero a lo largo del recorrido de la suspensión.
Por esta razón estos árboles necesitan juntas muy robustas, que permitan grandes desplazamientos angulares y a la vez se adapten a las variaciones de longitud generadas por el movimiento del puente.
En el otro lado del tubo, la junta cardán va montada sobre una unión deslizante, formada por un manguito estriado interiormente que forma parte de una de las horquillas, acoplándose al estriado del tubo.
El conjunto así formado constituye una unión oscilante y deslizante.
Los semiejes que conectan el diferencial con las ruedas en los vehículos con suspensión independiente montaron originariamente juntas cardánicas, bien a la salida del diferencial (ejes oscilantes), bien en ambos extremos junto con un mecanismo telescópico en el resto de los sistemas.
Sin embargo, cuando se utilizaron en los primeros vehículos de tracción delantera, las juntas cardánicas se enfrentaron a su característica irregularidad periódica; como dicha irregularidad aumenta con el ángulo formado por los árboles, al ángulo entre el semieje y la rueda se suma el ángulo de giro de la rueda, que puede ser tan elevado que genere una vibración que afecte a semiejes y caja de cambios.
[24] Otra alternativa empleada en los primeros vehículos todo terreno fue asumir la irregularidad, empleando un eje con solo dos juntas cardánicas reforzadas, donde la falta de adherencia permitía el resbalamiento de la rueda sin afectar a la transmisión.