En dinámica de fluidos , la teoría de ondas de Airy (a menudo denominada teoría de ondas lineales ) ofrece una descripción linealizada de la propagación de ondas de gravedad en la superficie de una capa de fluido homogénea . La teoría supone que la capa de fluido tiene una profundidad media uniforme y que el flujo de fluido es no viscoso , incompresible e irrotacional . Esta teoría fue publicada por primera vez, en su forma correcta, por George Biddell Airy en el siglo XIX. [1]
La teoría de las ondas aéreas se aplica a menudo en la ingeniería oceánica y costera para el modelado de estados aleatorios del mar , brindando una descripción de la cinemática y dinámica de las olas con una precisión suficientemente alta para muchos propósitos. [2] [3] Además, a partir de sus resultados se pueden estimar varias propiedades no lineales de segundo orden de las ondas de gravedad superficiales y su propagación. [4] La teoría de las ondas aéreas también es una buena aproximación a las ondas de tsunami en el océano, antes de que se intensifiquen cerca de la costa.
Esta teoría lineal se utiliza a menudo para obtener una estimación rápida y aproximada de las características de las olas y sus efectos. Esta aproximación es precisa para relaciones pequeñas entre la altura de la ola y la profundidad del agua (para olas en aguas poco profundas ) y entre la altura de la ola y la longitud de onda (para olas en aguas profundas).


La teoría de las ondas de aire utiliza un enfoque de flujo potencial (o potencial de velocidad ) para describir el movimiento de las ondas de gravedad sobre una superficie fluida. El uso del flujo potencial (no viscoso e irrotacional) en ondas de agua es notablemente exitoso, dado que no describe muchos otros flujos de fluidos donde a menudo es esencial tener en cuenta la viscosidad , la vorticidad , la turbulencia o la separación del flujo . Esto se debe al hecho de que para la parte oscilatoria del movimiento del fluido, la vorticidad inducida por ondas está restringida a algunas delgadas capas límite oscilatorias de Stokes en los límites del dominio del fluido. [5]
La teoría de las ondas aéreas se utiliza a menudo en ingeniería oceánica e ingeniería costera . Especialmente en el caso de las olas aleatorias , a veces llamadas turbulencias de las olas , la evolución de las estadísticas de las olas, incluido el espectro de las olas , se predice bien en distancias no demasiado largas (en términos de longitudes de onda) y en aguas no demasiado poco profundas. La difracción es uno de los efectos de las ondas que se puede describir con la teoría de ondas de Airy. Además, utilizando la aproximación WKBJ , se pueden predecir los bancos de olas y la refracción . [2]
Los intentos anteriores de describir las ondas de gravedad superficiales utilizando el flujo potencial fueron realizados, entre otros, por Laplace , Poisson , Cauchy y Kelland . Pero Airy fue el primero en publicar la derivación y formulación correctas en 1841. [1] Poco después, en 1847, Stokes amplió la teoría lineal de Airy para el movimiento ondulatorio no lineal , conocida como teoría ondulatoria de Stokes , correcta hasta tercer orden en la inclinación de la onda. [6] Incluso antes de la teoría lineal de Airy, Gerstner derivó en 1802 una teoría de ondas trocoidales no lineales , que sin embargo no es irrotacional . [1]
La teoría de las ondas aéreas es una teoría lineal para la propagación de ondas en la superficie de un flujo potencial y sobre un fondo horizontal. La elevación de la superficie libre η ( x , t ) de una componente de onda es sinusoidal , en función de la posición horizontal x y el tiempo t :
dónde
Las ondas se propagan a lo largo de la superficie del agua con la velocidad de fase c p :
El número de onda angular k y la frecuencia ω no son parámetros independientes (y por tanto tampoco la longitud de onda λ y el período T son independientes), sino que están acoplados. Las ondas de gravedad superficiales en un fluido son ondas dispersivas (que exhiben dispersión de frecuencia), lo que significa que cada número de onda tiene su propia frecuencia y velocidad de fase.
Tenga en cuenta que en ingeniería se utiliza a menudo la altura de ola H (la diferencia de elevación entre la cresta y el valle ):
válido en el presente caso de ondas periódicas lineales.
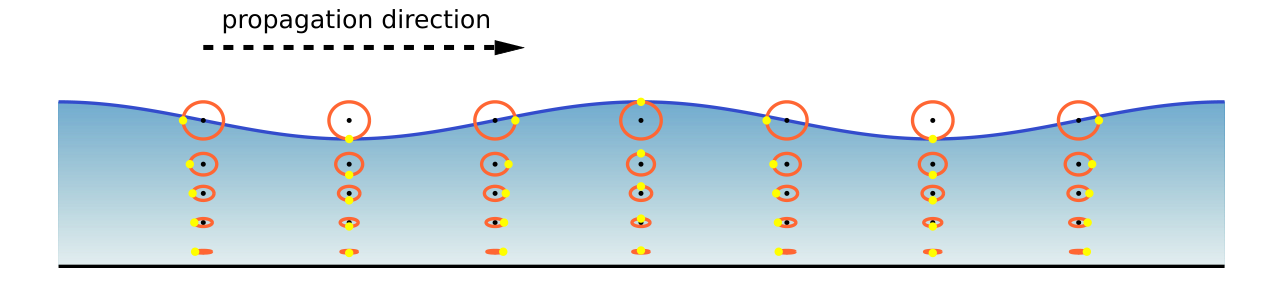

Debajo de la superficie hay un movimiento fluido asociado con el movimiento de la superficie libre. Mientras que la elevación de la superficie muestra una onda que se propaga, las partículas del fluido se encuentran en un movimiento orbital. Dentro del marco de la teoría de ondas de Airy, las órbitas son curvas cerradas: círculos en aguas profundas y elipses en profundidad finita; los círculos desaparecen antes de llegar al fondo de la capa de fluido y las elipses se vuelven más planas cerca del fondo de la capa de fluido. . Entonces, mientras la onda se propaga, las partículas del fluido simplemente orbitan (oscilan) alrededor de su posición promedio . Durante la propagación del movimiento ondulatorio, las partículas del fluido transfieren energía en la dirección de propagación de la onda, sin tener una velocidad media. El diámetro de las órbitas se reduce con la profundidad debajo de la superficie libre. En aguas profundas, el diámetro de la órbita se reduce al 4% de su valor en superficie libre a una profundidad de media longitud de onda.
De manera similar, también hay una oscilación de presión debajo de la superficie libre, y las oscilaciones de presión inducidas por las ondas se reducen con la profundidad debajo de la superficie libre, de la misma manera que ocurre con el movimiento orbital de las parcelas de fluido.
Las ondas se propagan en dirección horizontal, con coordenadas x , y un dominio fluido limitado arriba por una superficie libre en z = η ( x , t ) , siendo z la coordenada vertical (positiva en dirección ascendente) y t siendo el tiempo. [7] El nivel z = 0 corresponde a la elevación media de la superficie. El lecho impermeable debajo de la capa fluida está en z = − h . Además, se supone que el flujo es incompresible e irrotacional (una buena aproximación del flujo en el interior del fluido para ondas en una superficie líquida) y se puede utilizar la teoría del potencial para describir el flujo. El potencial de velocidad Φ( x , z , t ) está relacionado con los componentes de la velocidad del flujo u x y u z en las direcciones horizontal ( x ) y vertical ( z ) mediante:
Entonces, debido a la ecuación de continuidad para un flujo incompresible, el potencial Φ debe satisfacer la ecuación de Laplace :
Se necesitan condiciones de frontera en el lecho y la superficie libre para cerrar el sistema de ecuaciones. Para su formulación en el marco de la teoría lineal, es necesario especificar cuál es el estado base (o solución de orden cero ) del flujo. Aquí, asumimos que el estado base es reposo, lo que implica que las velocidades medias del flujo son cero.
Al ser el lecho impermeable, se llega a la condición de contorno del lecho cinemático :
En el caso de aguas profundas (lo que significa profundidad de agua infinita , desde un punto de vista matemático), las velocidades del flujo tienen que llegar a cero en el límite a medida que la coordenada vertical llega a menos infinito: z → −∞ .
En la superficie libre, para ondas infinitesimales , el movimiento vertical del flujo debe ser igual a la velocidad vertical de la superficie libre. Esto conduce a la condición de contorno cinemática de superficie libre:
Si la elevación de la superficie libre η ( x , t ) fuera una función conocida, esto sería suficiente para resolver el problema de flujo. Sin embargo, la elevación de la superficie es una incógnita adicional, para la cual se necesita una condición de contorno adicional. Esto lo proporciona la ecuación de Bernoulli para un flujo potencial inestable. Se supone que la presión sobre la superficie libre es constante. Esta presión constante se toma igual a cero, sin pérdida de generalidad, ya que el nivel de dicha presión constante no altera el flujo. Después de la linealización, esto da la condición de contorno dinámica de superficie libre:
Debido a que esta es una teoría lineal, en ambas condiciones de contorno de superficie libre – la cinemática y la dinámica, ecuaciones ( 3 ) y ( 4 ) – el valor de Φ y∂Φ/∂ zen el nivel medio fijo se utiliza z = 0 .
Para una onda que se propaga de una sola frecuencia (una onda monocromática ), la elevación de la superficie es de la forma: [7]
El potencial de velocidad asociado, que satisface la ecuación de Laplace (1) en el interior del fluido, así como las condiciones de contorno cinemáticas en la superficie libre (2) y el lecho (3), es:
con sinh y cosh la función seno hiperbólico y coseno hiperbólico , respectivamente. Pero η y Φ también tienen que satisfacer la condición de frontera dinámica, lo que da como resultado valores no triviales (distintos de cero) para la amplitud de onda a solo si se satisface la relación de dispersión lineal :
con tanh la tangente hiperbólica . Por lo tanto, la frecuencia angular ω y el número de onda k (o, equivalentemente, el período T y la longitud de onda λ ) no se pueden elegir de forma independiente, sino que están relacionados. Esto significa que la propagación de ondas en una superficie de fluido es un problema propio . Cuando ω y k satisfacen la relación de dispersión, la amplitud de la onda a se puede elegir libremente (pero lo suficientemente pequeña como para que la teoría de ondas de Airy sea una aproximación válida).
En la siguiente tabla se dan varias cantidades de flujo y parámetros según la teoría de ondas de Airy. [7] Las cantidades dadas son para una situación un poco más general que para la solución dada anteriormente. En primer lugar, las ondas pueden propagarse en una dirección horizontal arbitraria en el plano x = ( x , y ) . El vector del número de onda es k , y es perpendicular a las levas de las crestas de las ondas . En segundo lugar, se tiene en cuenta una velocidad de flujo media U , en dirección horizontal y uniforme en (independiente de) la profundidad z . Esto introduce un desplazamiento Doppler en las relaciones de dispersión. En una ubicación fija en la Tierra, la frecuencia angular observada (o frecuencia angular absoluta ) es ω . Por otro lado, en un sistema de referencia que se mueve con la velocidad media U (por lo que la velocidad media observada desde este sistema de referencia es cero), la frecuencia angular es diferente. Se llama frecuencia angular intrínseca (o frecuencia angular relativa ), denotada por σ . Entonces, en el movimiento ondulatorio puro, con U = 0 , ambas frecuencias ω y σ son iguales. El número de onda k (y la longitud de onda λ ) son independientes del marco de referencia y no tienen desplazamiento Doppler (para ondas monocromáticas).
La tabla solo proporciona las partes oscilatorias de las cantidades de flujo (velocidades, excursiones de partículas y presión) y no su valor medio o deriva. Las excursiones de las partículas oscilatorias ξ x y ξ z son las integrales de tiempo de las velocidades del flujo oscilatorio u x y u z respectivamente.
La profundidad del agua se clasifica en tres regímenes: [8]

En los casos límite de aguas profundas y poco profundas, se pueden realizar aproximaciones simplificadoras a la solución. Mientras que para profundidad intermedia se deben utilizar las formulaciones completas.

Debido a la tensión superficial , la relación de dispersión cambia a: [11]
siendo γ la tensión superficial en newtons por metro. Todas las ecuaciones anteriores para ondas lineales siguen siendo las mismas, si la aceleración gravitacional g se reemplaza por [12]
Como resultado de la tensión superficial, las ondas se propagan más rápido. La tensión superficial sólo influye en las ondas cortas, con longitudes de onda inferiores a unos pocos decímetros en el caso de una interfaz agua-aire. Para longitudes de onda muy cortas (2 mm o menos, en el caso de la interfaz entre el aire y el agua), los efectos de la gravedad son insignificantes. Tenga en cuenta que los tensioactivos pueden alterar la tensión superficial .
La velocidad del grupo ∂Ω/∂ kde ondas capilares, dominadas por efectos de tensión superficial, es mayor que la velocidad de fase Ω/k. Esto es lo opuesto a la situación de las ondas de gravedad superficiales (con una tensión superficial insignificante en comparación con los efectos de la gravedad) donde la velocidad de fase excede la velocidad del grupo. [13]
Las ondas superficiales son un caso especial de ondas interfaciales, en la interfaz entre dos fluidos de diferente densidad .
Consideremos dos fluidos separados por una interfaz y sin mayores límites. Entonces su relación de dispersión ω 2 = Ω 2 ( k ) está dada por [11] [14] [15]
donde ρ y ρ ′ son las densidades de los dos fluidos, debajo ( ρ ) y arriba ( ρ ′ ) de la interfaz, respectivamente. Además , γ es la tensión superficial en la interfaz.
Para que existan ondas interfaciales, la capa inferior tiene que ser más pesada que la superior, ρ > ρ ′ . De lo contrario, la interfaz es inestable y se desarrolla una inestabilidad de Rayleigh-Taylor .

Para dos capas homogéneas de fluidos, de espesor medio h debajo de la interfaz y h ′ arriba – bajo la acción de la gravedad y delimitadas arriba y abajo por paredes rígidas horizontales – se proporciona la relación de dispersión ω 2 = Ω 2 ( k ) para ondas de gravedad. por: [16]
donde nuevamente ρ y ρ ′ son las densidades por debajo y por encima de la interfaz, mientras que coth es la función cotangente hiperbólica . Para el caso de que ρ ′ sea cero, esto se reduce a la relación de dispersión de las ondas de gravedad superficiales en agua de profundidad finita h .
En este caso, la relación de dispersión permite dos modos: un modo barotrópico donde la amplitud de la superficie libre es grande en comparación con la amplitud de la onda interfacial, y un modo baroclínico donde ocurre lo contrario: la onda interfacial es más alta y en antifase. con la onda de superficie libre. La relación de dispersión para este caso es de una forma más complicada. [17]
Varias propiedades de las ondas de segundo orden , que son cuadráticas en la amplitud de la onda a , pueden derivarse directamente de la teoría de las ondas de Airy. Son de importancia en muchas aplicaciones prácticas, como las predicciones de las condiciones de las olas. [18] Utilizando una aproximación WKBJ , las propiedades de las olas de segundo orden también encuentran sus aplicaciones en la descripción de olas en caso de batimetría que varía lentamente y variaciones del flujo medio de las corrientes y la elevación de la superficie. Así como en la descripción de las interacciones entre onda y flujo medio debidas a variaciones temporales y espaciales en la amplitud, frecuencia, longitud de onda y dirección del propio campo ondulatorio.
En la siguiente tabla se dan varias propiedades de las ondas de segundo orden, así como las ecuaciones dinámicas que satisfacen en caso de condiciones que varían lentamente en el espacio y el tiempo. Más detalles sobre estos se pueden encontrar a continuación. La tabla proporciona resultados para la propagación de ondas en una dimensión espacial horizontal. Más adelante en esta sección se dan descripciones y resultados más detallados para el caso general de propagación en un espacio horizontal bidimensional.
Las últimas cuatro ecuaciones describen la evolución de trenes de ondas que varían lentamente a lo largo de la batimetría en interacción con el flujo medio , y pueden derivarse de un principio variacional: el método lagrangiano promediado de Whitham . [19] En la ecuación del momento horizontal medio, d ( x ) es la profundidad del agua tranquila, es decir, el lecho debajo de la capa de fluido está ubicado en z = − d . Tenga en cuenta que la velocidad media del flujo en las ecuaciones de masa y momento es la velocidad de transporte de masa × , incluidos los efectos de la zona de salpicadura de las ondas sobre el transporte de masa horizontal, y no la velocidad euleriana media (por ejemplo, medida con un flujo fijo). metro).
La energía de las olas es una cantidad de interés primordial, ya que es una cantidad primaria que se transporta con los trenes de olas. [20] Como se puede ver arriba, muchas cantidades de ondas como la elevación de la superficie y la velocidad orbital son de naturaleza oscilatoria con media cero (dentro del marco de la teoría lineal). En las olas del agua, la medida de energía más utilizada es la densidad media de energía de las olas por unidad de área horizontal. Es la suma de la densidad de energía cinética y potencial , integrada a lo largo de la profundidad de la capa fluida y promediada a lo largo de la fase de onda. Lo más sencillo de derivar es la densidad de energía potencial media por unidad de área horizontal E pot de las ondas de gravedad superficiales, que es la desviación de la energía potencial debido a la presencia de las ondas: [21]
La barra superior indica el valor medio (que en el caso actual de las ondas periódicas puede tomarse como un promedio temporal o como un promedio sobre una longitud de onda en el espacio).
De manera similar, se encuentra que la densidad de energía cinética media por unidad de área horizontal E kin del movimiento ondulatorio es: [21]
con σ la frecuencia intrínseca, consulte la tabla de cantidades de onda. Usando la relación de dispersión, el resultado para las ondas de gravedad superficiales es:
Como puede verse, las densidades de energía cinética y potencial medias son iguales. Ésta es una propiedad general de las densidades de energía de ondas lineales progresivas en un sistema conservador . [22] [23] Sumando las contribuciones potenciales y cinéticas, E pot y E kin , la densidad de energía media por unidad de área horizontal E del movimiento ondulatorio es:
En el caso de que los efectos de la tensión superficial no sean despreciables, su contribución también se suma a las densidades de energía potencial y cinética, dando [22]
entonces
con γ la tensión superficial .
En general, puede haber una transferencia de energía entre el movimiento ondulatorio y el movimiento medio del fluido. Esto significa que la densidad de energía de las olas no es en todos los casos una cantidad conservada (despreciando los efectos disipativos ), pero la densidad de energía total (la suma de la densidad de energía por unidad de área del movimiento de las olas y el movimiento de flujo medio) sí lo es. Sin embargo, para trenes de olas que varían lentamente, que se propagan en campos batimétricos y de flujo medio que varían lentamente, existe una cantidad de olas similar y conservada, la acción de las olas A =mi/σ: [19] [24] [25]
con ( U + c g ) A el flujo de acción y c g = c g e k el vector de velocidad del grupo . La conservación de la acción constituye la base de muchos modelos de ondas de viento y modelos de turbulencia de olas . [26] También es la base de los modelos de ingeniería costera para el cálculo de la formación de bancos de olas . [27] Ampliando la ecuación de conservación de la acción de las olas anterior se obtiene la siguiente ecuación de evolución para la densidad de energía de las olas: [28]
con:
En esta ecuación en forma no conservativa, el producto interno de Frobenius S : (∇ U ) es el término fuente que describe el intercambio de energía del movimiento ondulatorio con el flujo medio. Sólo en el caso de que la velocidad de corte media sea cero, ∇ U = 0 , se conserva la densidad de energía de las olas media E. Los dos tensores S y ∇ U están en un sistema de coordenadas cartesiano de la forma: [29]
siendo k x y k y las componentes del vector de número de onda k y de manera similar U x y U y las componentes in del vector de velocidad media U .
El momento horizontal medio por unidad de área M inducido por el movimiento ondulatorio (y también por el flujo de masa o transporte de masa inducido por las olas ) es: [30]
que es un resultado exacto para ondas de agua progresivas periódicas, válido también para ondas no lineales . [31] Sin embargo, su validez depende en gran medida de la forma en que se definen el momento de la onda y el flujo de masa. Stokes ya identificó dos posibles definiciones de velocidad de fase para ondas periódicas no lineales: [6]
La relación anterior entre el momento de las olas M y la densidad de energía de las olas E es válida dentro del marco de la primera definición de Stokes.
Sin embargo, para olas perpendiculares a una línea costera o en un canal cerrado de olas de laboratorio , la segunda definición (S2) es más apropiada. Estos sistemas de ondas tienen cero flujo de masa y momento cuando se utiliza la segunda definición. [32] Por el contrario, según la primera definición de Stokes (S1), existe un flujo de masa inducido por las ondas en la dirección de propagación de las ondas, que debe equilibrarse con un flujo medio U en la dirección opuesta, llamado resaca .
Así que, en general, hay bastantes sutilezas involucradas. Por eso también se utiliza el término pseudo-momento de las ondas en lugar de momento de la onda. [33]
Para campos de batimetría , olas y flujo medio que varían lentamente, la evolución del flujo medio se puede describir en términos de la velocidad media de transporte de masa × definida como: [34]
Tenga en cuenta que para aguas profundas, cuando la profundidad media h llega al infinito, la velocidad euleriana media U y la velocidad de transporte media × se vuelven iguales.
La ecuación para la conservación de masa es: [19] [34]
donde h ( x , t ) es la profundidad media del agua, que varía lentamente en el espacio y el tiempo.
De manera similar, el momento horizontal medio evoluciona como: [19] [34]
con d la profundidad del agua tranquila (el fondo del mar está en z = – d ), S es el tensor de radiación-estrés de las olas , I es la matriz identidad y ⊗ es el producto diádico :
Tenga en cuenta que el momento horizontal medio sólo se conserva si el fondo del mar es horizontal (la profundidad del agua tranquila d es una constante), de acuerdo con el teorema de Noether .
El sistema de ecuaciones se cierra mediante la descripción de las ondas. La propagación de la energía de las olas se describe mediante la ecuación de conservación de la acción de las olas (sin disipación ni interacciones de olas no lineales): [19] [24]
La cinemática de la onda se describe mediante la ecuación de conservación de la cresta de la onda: [35]
con la frecuencia angular ω una función del número de onda (angular) k , relacionado a través de la relación de dispersión . Para que esto sea posible, el campo ondulatorio debe ser coherente . Al tomar el rizo de la conservación de la cresta de onda, se puede ver que un campo de número de onda inicialmente irrotacional permanece irrotacional.
Cuando se sigue una sola partícula en movimiento ondulatorio puro ( U = 0 ), según la teoría lineal de ondas de Airy, una primera aproximación da órbitas elípticas cerradas para las partículas de agua. [36] Sin embargo, para las ondas no lineales, las partículas exhiben una deriva de Stokes para la cual se puede derivar una expresión de segundo orden a partir de los resultados de la teoría de ondas de Airy (consulte la tabla anterior sobre las propiedades de las ondas de segundo orden). [37] La velocidad de deriva de Stokes ū S , que es la deriva de partículas después de un ciclo de onda dividida por el período , se puede estimar utilizando los resultados de la teoría lineal: [38]
por lo que varía en función de la elevación. La fórmula dada corresponde a la primera definición de Stokes de celeridad de onda. Cuando ρ ū S se integra en profundidad, se recupera la expresión del momento medio de la onda M. [38]











![{\displaystyle {\begin{aligned}E_{\text{pot}}&={\overline {\int _{-h}^{\eta }\rho gz\,\mathrm {d} z}}-\ int _{-h}^{0}\rho gz\,\mathrm {d} z\\[6px]&={\overline {{\tfrac {1}{2}}\rho g\eta ^{2 }}}={\tfrac {1}{4}}\rho ga^{2}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/61b9d1f161bedb7c8cc470b8df4944d643a672e5)
![{\displaystyle {\begin{aligned}E_{\text{kin}}&={\overline {\int _{-h}^{0}{\tfrac {1}{2}}\rho \left[\ izquierda|\mathbf {U} +\mathbf {u} _{x}\right|^{2}+u_{z}^{2}\right]\,\mathrm {d} z}}-\int _ {-h}^{0}{\tfrac {1}{2}}\rho \left|\mathbf {U} \right|^{2}\,\mathrm {d} z\\[6px]&= {\tfrac {1}{4}}\rho {\frac {\sigma ^{2}}{k\tanh kh}}a^{2},\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4dc8cbb31729008fd59ba3f6348533138cc0d1ff)




![{\displaystyle {\frac {\partial {\mathcal {A}}}{\partial t}}+\nabla \cdot \left[\left(\mathbf {U} +\mathbf {c} _{g}\ derecha){\mathcal {A}}\right]=0,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/69ddfc6a2fe62df278e5dc4c91aca7963c249a19)
![{\displaystyle {\frac {\partial E}{\partial t}}+\nabla \cdot \left[\left(\mathbf {U} +\mathbf {c} _{g}\right)E\right] +{\boldsymbol {S}}:\left(\nabla \mathbf {U} \right)=0,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/383fb93bcfb3cac9b63ea74a0f984feaf18a91f0)
![{\displaystyle {\begin{aligned}{\boldsymbol {S}}&={\begin{pmatrix}S_{xx}&S_{xy}\\S_{yx}&S_{yy}\end{pmatrix}}={ \boldsymbol {I}}\left({\frac {c_{g}}{c_{p}}}-{\frac {1}{2}}\right)E+{\frac {1}{k^{ 2}}}{\begin{pmatrix}k_{x}k_{x}&k_{x}k_{y}\\[2ex]k_{y}k_{x}&k_{y}k_{y}\end{ pmatrix}}{\frac {c_{g}}{c_{p}}}E,\\[6px]{\boldsymbol {I}}&={\begin{pmatrix}1&0\\0&1\end{pmatrix} },\\[6px]\nabla \mathbf {U} &={\begin{pmatrix}\displaystyle {\frac {\partial U_{x}}{\partial x}}&\displaystyle {\frac {\partial U_{y}}{\partial x}}\\[2ex]\displaystyle {\frac {\partial U_{x}}{\partial y}}&\displaystyle {\frac {\partial U_{y}}{ \partial y}}\end{pmatrix}},\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f53bed8a24fc6734ea673b27c3c90c87df027b85)
![{\displaystyle {\begin{aligned}\mathbf {M} &={\overline {\int _{-h}^{\eta }\rho \left(\mathbf {U} +\mathbf {u} _{ x}\right)\,\mathrm {d} z}}-\int _{-h}^{0}\rho \mathbf {U} \,\mathrm {d} z\\[6px]&={ \frac {E}{c_{p}}}\mathbf {e} _{k},\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/488c9ce81a7c093b88bab3e8980c07f7d9544b56)




![{\displaystyle {\frac {\partial }{\partial t}}\left({\frac {E}{\sigma }}\right)+\nabla \cdot \left[\left(\mathbf {U} + \mathbf {c} _{g}\right){\frac {E}{\sigma }}\right]=0.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/73b7f9f91676efeb18f39b992a79a4a7cb3e8a7f)

