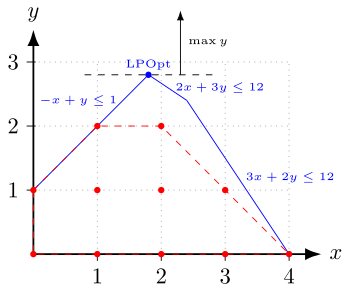
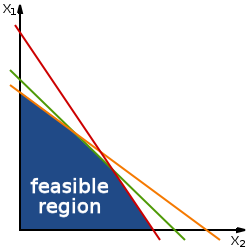
Región factible
Por ejemplo, considere el problema con respecto a las variables
En muchos problemas, el conjunto factible refleja una restricción de que una o más variables deben ser no negativas.
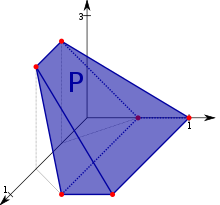
En los problemas de programación lineal, el conjunto factible es un politopo convexo: una región en el espacio multidimensional cuyos límites están formados por hiperplanos y cuyas esquinas son vértices.
Si las restricciones de un problema de optimización son mutuamente contradictorias, no hay puntos que satisfagan todas las restricciones y, por lo tanto, la región factible es el conjunto nulo.
En este caso, el problema no tiene solución y se dice que es inviable.
Los conjuntos factibles pueden ser delimitados o ilimitados.
es ilimitado porque en algunas direcciones no hay límite sobre qué tan lejos se puede llegar y aún estar en la región factible.
variables, una condición necesaria, pero insuficiente para que el conjunto factible esté acotado es que el número de restricciones sea al menos
Si el conjunto factible no está acotado, puede haber o no un óptimo, dependiendo de las características específicas de la función objetivo.
Por ejemplo, si la región factible se define por el conjunto de restricciones
no tiene óptima, ya que cualquier solución candidato puede ser mejorada mediante el aumento de
Una solución candidata no tiene que ser una solución probable o razonable al problema — simplemente está en el conjunto que satisface todas las restricciones; es decir, está en el conjunto de soluciones factibles.
Los algoritmos para resolver varios tipos de problemas de optimización a menudo reducen el conjunto de soluciones candidatas a un subconjunto de las soluciones factibles, cuyos puntos permanecen como soluciones candidatas, mientras que las otras soluciones factibles se excluyen de ahora en adelante como candidatas.
Este es el conjunto de todas las posibles soluciones que satisfacen las limitaciones del problema.
En el caso del algoritmo genético, las soluciones candidatas son los individuos de la población que el algoritmo está desarrollando.
[2] En cálculo, se busca una solución óptima utilizando la prueba de la primera derivada: la primera derivada de la función que se está optimizando se equipara a cero, y cualquier valor de la(s) variable(s) de elección que satisfaga esta ecuación se considera como soluciones candidatas (mientras que aquellos que no se descartan como candidatos).
Primero, podría dar un mínimo cuando se busca un máximo (o viceversa), y segundo, puede que no dé ni un mínimo ni un máximo, sino más bien un punto de silla o un punto de inflexión, en el que se produce una pausa temporal en la subida local o se produce la caída de la función.
Tales soluciones candidatas pueden descartarse mediante el uso de la prueba de la segunda derivada, cuya satisfacción es suficiente para que la solución candidata sea al menos localmente óptima.
Esta solución candidata es de hecho correcta excepto cuando
En el método simplex para resolver problemas de programación lineal, se selecciona un vértice del politopo factible como la solución candidata inicial y se prueba su optimalidad; si se rechaza como el óptimo, un vértice adyacente se considera como la siguiente solución candidata.