Navegación por estima
La navegación por estima es la navegación y ubicación de un vehículo (barco, avión u otros) por medios analíticos, teniendo en cuenta la situación de partida, su rumbo y su velocidad, calculando el llamado punto de fantasía,[1][2]Se utiliza en los siguientes ámbitos: La navegación por estima está sujeta a errores acumulativos.
Si bien la navegación por estima puede brindar la mejor información disponible sobre el puesto actual con poca matemática o análisis, está sujeta a errores de aproximación significativos.
Para obtener información de posición precisa, tanto la velocidad como la dirección deben conocerse con precisión en todo momento durante el viaje.
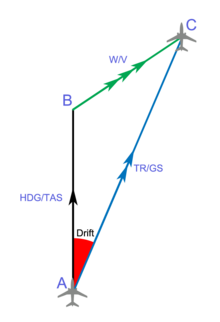
En particular, la navegación por estima no tiene en cuenta la deriva direccional durante el viaje a través de un medio fluido.
Pero un nodo sensor móvil, que cambia continuamente su ubicación geográfica con el tiempo, es difícil de localizar.
En estos escenarios, no se puede permitir un dispositivo GPS para cada nodo sensor.
En la literatura se han propuesto varios algoritmos de localización basados en el método Sequential Monte Carlo (SMC).
[4][5] A veces, un nodo en algunos lugares recibe solo dos ubicaciones conocidas y, por lo tanto, se vuelve imposible de localizar.
Para superar este problema, se utiliza la técnica de navegación por estima.
Con esta técnica, un nodo sensor utiliza su ubicación calculada previamente para la localización en intervalos de tiempo posteriores.
Se ha demostrado que animales como hormigas, roedores y gansos rastrean sus ubicaciones continuamente en relación con un punto de partida y regresan a él, una habilidad importante para los recolectores con un hogar fijo.
A bordo del barco, un gráfico de navegación a estima se considera importante para evaluar la información de posición y planificar el movimiento del barco.
Antes de la instrumentación moderna, se determinaba a bordo del barco usando una corredera.
Antes del desarrollo en el siglo XVIII del cronómetro marino por John Harrison y la distancia lunar, la navegación a estima era el método principal para determinar la longitud disponible para marineros como Cristóbal Colón y Juan Caboto en sus viajes transatlánticos.
La densidad del aire por el que se mueve la aeronave afecta su rendimiento, así como los ajustes de viento, peso y potencia.
Un avión que vuela a 250 nudos de velocidad durante 2 horas ha recorrido 500 millas náuticas por el aire.
[11] Se dibuja una línea de rumbo en la carta aeronáutica junto con posiciones estimadas a intervalos fijos (por ejemplo, cada ½ hora).
Las observaciones visuales de las características del suelo se utilizan para obtener correcciones.
[13] Por lo general, se utiliza para reducir la necesidad de tecnología de detección, como sensores ultrasónicos, GPS, o la colocación de algunos codificadores lineales y rotatorios, en un codificador autónomo robot, lo que reduce en gran medida el costo y la complejidad a expensas del rendimiento y la repetibilidad.
La navegación a estima no es totalmente precisa, lo que puede dar lugar a errores en las estimaciones de distancia que van desde unos pocos milímetros (en maquinado CNC) hasta kilómetros (en UAV), según la duración de la carrera, la velocidad del robot y varios otros factores.