Comportamiento colectivo de los animales
Por ejemplo, determinar la reglas mediante las cuales un animal individual navega con relación a sus vecinos en un grupo puede conducir a avances en la disposición y control de grupos de micro-robots nadadores o voladores tales como UAVs (Vehículos aéreos no tripulados).
Esta teoría establece que en la medida que el tamaño del grupo aumenta, la tarea de vigilar el entorno para detectar depredadores puede ser compartida entre numerosos individuos.
En resumen, un individuo posee ventajas cuanto mayor es el grupo en el cual se encuentra, suponiendo que las probabilidades de detección y ataque no aumentan en forma desproporcionada con el tamaño del grupo.
[9] En este estudio, se determinó el tiempo que le requería a grupos de pececillos de la familia Gerreidae y peces dorados (Carassius spp.)
También se ha demostrado que los patos ahorran energía al nadar en una formación en fila.
Para poder determinar dicha estructura es preciso utilizar varias cámaras ubicadas en el volumen del espacio a estudiar, una técnica denominada estereofotogrametría.
Además, los animales se pueden solapar en la imagen fotográfica, un problema denominado oclusión.
Numerosos modelos actuales utilizan variaciones de estas reglas.
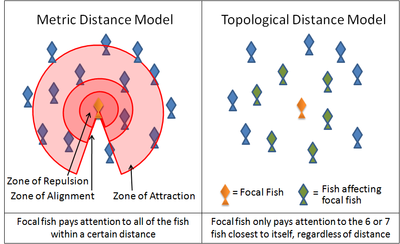
En la zona de atracción exterior, que se extiende tanto como alcanzan las señales que recogen sus órganos sensoriales, el animal focal trata de desplazarse hacia un vecino.
Sin embargo estudios recientes de bandadas de estorninos han concluido, que cada ave modifica su posición en forma relativa a los seis o siete animales que se encuentran en su entorno inmediato, sin importar cuan cerca o lejos se encuentren dichos animales.
No se ha demostrado todavía si esta misma regla es aplicable a otros animales.