

Una pantalla táctil (o pantalla táctil ) es un tipo de pantalla que puede detectar la entrada táctil de un usuario. Consta de un dispositivo de entrada (un panel táctil) y un dispositivo de salida (una pantalla visual). El panel táctil suele estar situado en la parte superior de la pantalla visual electrónica de un dispositivo. Las pantallas táctiles se encuentran comúnmente en teléfonos inteligentes , tabletas , computadoras portátiles y otros dispositivos electrónicos.
La pantalla suele ser una pantalla LCD , AMOLED u OLED .
Un usuario puede dar entrada o controlar el sistema de procesamiento de información a través de gestos simples o multitáctiles tocando la pantalla con un lápiz especial o uno o más dedos. [1] Algunas pantallas táctiles utilizan guantes comunes o con un revestimiento especial para funcionar, mientras que otras pueden funcionar solo con un lápiz o bolígrafo especial. El usuario puede usar la pantalla táctil para reaccionar a lo que se muestra y, si el software lo permite, para controlar cómo se muestra; por ejemplo, haciendo zoom para aumentar el tamaño del texto.
Una pantalla táctil permite al usuario interactuar directamente con lo que se muestra, en lugar de utilizar un mouse , un panel táctil u otros dispositivos similares (excepto un lápiz óptico, que es opcional para la mayoría de las pantallas táctiles modernas). [2]
Las pantallas táctiles son comunes en dispositivos como teléfonos inteligentes , consolas de juegos portátiles y computadoras personales . Son comunes en sistemas de punto de venta (POS), cajeros automáticos (ATM) y máquinas de votación electrónica . También pueden conectarse a computadoras o, como terminales, a redes. Desempeñan un papel destacado en el diseño de dispositivos digitales como asistentes digitales personales (PDA) y algunos lectores electrónicos . Las pantallas táctiles son importantes en entornos educativos como aulas o en campus universitarios. [3]
La popularidad de los teléfonos inteligentes, las tabletas y muchos tipos de dispositivos informáticos ha impulsado la demanda y la aceptación de pantallas táctiles comunes para dispositivos electrónicos portátiles y funcionales. Las pantallas táctiles se encuentran en el campo médico, la industria pesada , los cajeros automáticos (ATM) y los quioscos, como las exhibiciones de museos o la automatización de salas , donde los sistemas de teclado y mouse no permiten una interacción lo suficientemente intuitiva, rápida o precisa por parte del usuario con el contenido de la pantalla.
Históricamente, el sensor de pantalla táctil y el firmware basado en controlador que lo acompaña han sido puestos a disposición por una amplia gama de integradores de sistemas en el mercado secundario , y no por fabricantes de pantallas, chips o placas base . Los fabricantes de pantallas y chips han reconocido la tendencia hacia la aceptación de las pantallas táctiles como un componente de interfaz de usuario y han comenzado a integrar pantallas táctiles en el diseño fundamental de sus productos.
Un predecesor de la pantalla táctil moderna incluye sistemas basados en lápiz óptico.
1946 LÁPIZ DE LUZ DIRECTA - Philco Company presentó una patente para un lápiz diseñado para retransmisiones deportivas que, cuando se colocaba sobre una pantalla intermedia de tubo de rayos catódicos (CRT), amplificaba y mejoraba la señal original. En efecto, se utilizaba para dibujar flechas o círculos temporalmente en una retransmisión televisiva en directo, como se describe en la patente estadounidense 2487641A, Denk, William E, "Puntero electrónico para imágenes de televisión", publicada el 8 de noviembre de 1949 .
1962 ÓPTICA - La primera versión de una pantalla táctil que funcionaba independientemente de la luz producida por la pantalla fue patentada por AT&T Corporation US 3016421A, Harmon, Leon D, "Transmisor electrográfico", publicado el 9 de enero de 1962. Esta pantalla táctil utilizaba una matriz de luces colimadas que brillaban ortogonalmente a lo largo de la superficie táctil. Cuando un haz se interrumpe con un lápiz, los fotodetectores que ya no reciben una señal se pueden utilizar para determinar dónde está la interrupción. Las iteraciones posteriores de pantallas táctiles basadas en matrices se basaron en esto agregando más emisores y detectores para mejorar la resolución, emisores pulsantes para mejorar la relación señal óptica a ruido y una matriz no ortogonal para eliminar las lecturas de sombras cuando se usa multitáctil.
1963 LÁPIZ DE LUZ INDIRECTA: Invenciones posteriores se basaron en este sistema para liberar a los lápices de teleescritura de sus ataduras mecánicas. Al transcribir lo que un usuario dibuja en una computadora, se puede guardar para uso futuro. Véase US 3089918A, Graham, Robert E, "Telewriting apparatus", publicado el 14 de mayo de 1963 .
1965 CAPACITANCIA Y RESISTENCIA - La primera pantalla táctil controlada por el dedo fue desarrollada por Eric Johnson, del Royal Radar Establishment ubicado en Malvern , Inglaterra, quien describió su trabajo en pantallas táctiles capacitivas en un breve artículo publicado en 1965 [8] [9] y luego de manera más completa, con fotografías y diagramas, en un artículo publicado en 1967. [10]
CORTINA ULTRASÓNICA DE MEDIADOS DE LOS AÑOS 60 -Otro precursor de las pantallas táctiles, un dispositivo de puntero basado en una cortina ultrasónica situado delante de la pantalla de un terminal, había sido desarrollado por un equipo dirigido por Rainer Mallebrein en Telefunken Konstanz para un sistema de control del tráfico aéreo. [11] En 1970, esto evolucionó hasta convertirse en un dispositivo denominado "Touchinput- Einrichtung " ("dispositivo de entrada táctil") para el terminal SIG 50 que utilizaba una pantalla de vidrio con revestimiento conductor delante de la pantalla. [12] [11] Esto se patentó en 1971 y la patente se concedió un par de años después. [12] [11] El mismo equipo ya había inventado y comercializado el ratón Rollkugel RKS 100-86 para el SIG 100-86 un par de años antes. [12]
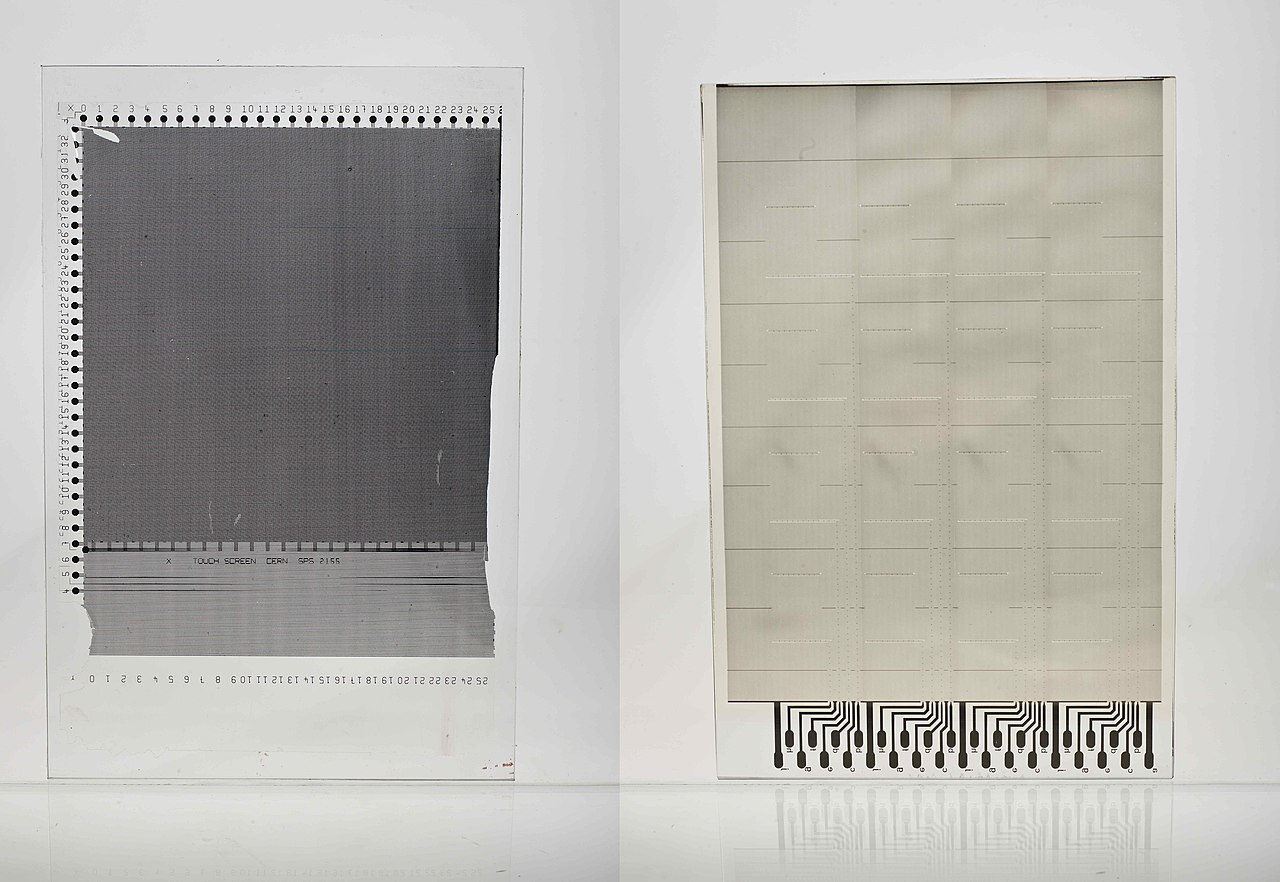
1968 CAPACITANCIA - La aplicación de la tecnología táctil para el control del tráfico aéreo fue descrita en un artículo publicado en 1968. [13] Frank Beck y Bent Stumpe , ingenieros del CERN (Organización Europea para la Investigación Nuclear), desarrollaron una pantalla táctil transparente a principios de los años 1970, [14] basándose en el trabajo de Stumpe en una fábrica de televisores a principios de los años 1960. Luego fue fabricada por el CERN, y poco después por socios de la industria, [15] y se puso en uso en 1973. [16]
1972 ÓPTICA - Un grupo de la Universidad de Illinois presentó una solicitud de patente para una pantalla táctil óptica [17] que se convirtió en una parte estándar de la terminal para estudiantes Magnavox Plato IV y se construyeron miles para este propósito. Estas pantallas táctiles tenían una matriz cruzada de sensores de posición infrarrojos de 16x16 , cada uno compuesto por un LED en un borde de la pantalla y un fototransistor correspondiente en el otro borde, todos montados frente a un panel de pantalla de plasma monocromático . Esta disposición podía detectar cualquier objeto opaco del tamaño de la punta de un dedo que estuviera cerca de la pantalla.
1973 CAPACITANCIA MULTITÁCTIL - En 1973, Beck y Stumpe publicaron otro artículo en el que describían su pantalla táctil capacitiva. En él se indicaba que era capaz de realizar funciones multitáctiles, pero esta función se inhibió a propósito, probablemente porque no se consideraba útil en ese momento ("Una... variable... llamada BUT cambia su valor de cero a cinco cuando se toca un botón. El toque de otros botones daría otros valores de BUT distintos de cero, pero esto está protegido por software" (página 6, sección 2.6). [18] "El contacto real entre un dedo y el condensador se evita mediante una fina lámina de plástico" (página 3, sección 2.3). En ese momento, la capacitancia proyectada aún no se había inventado.
1977 RESISTIVO - Una empresa estadounidense, Elographics, en asociación con Siemens, comenzó a trabajar en el desarrollo de una implementación transparente de una tecnología de panel táctil opaco existente, patente estadounidense n.° 3.911.215, del 7 de octubre de 1975, que había sido desarrollada por el fundador de Elographics, George Samuel Hurst . [19] La pantalla táctil con tecnología resistiva resultante se mostró por primera vez en la Feria Mundial de Knoxville en 1982. [20]
CÁMARA MULTITÁCTIL 1982 - La tecnología multitáctil comenzó en 1982, cuando el Grupo de Investigación de Entrada de la Universidad de Toronto desarrolló el primer sistema multitáctil con entrada humana, utilizando un panel de vidrio esmerilado con una cámara colocada detrás del vidrio.
ÓPTICA 1983 - A partir de 1983 se utilizó una pantalla táctil óptica en la HP-150 . La HP 150 fue una de las primeras computadoras comerciales con pantalla táctil del mundo. [21] HP montó sus transmisores y receptores infrarrojos alrededor del bisel de un tubo de rayos catódicos (CRT) Sony de 9 pulgadas .
1983 PANTALLA TÁCTIL MULTITÁCTIL CON DETECCIÓN DE FUERZA: Bob Boie, de AT&T Bell Labs, utilizó capacitancia para rastrear los cambios mecánicos en el espesor de una membrana superpuesta suave y deformable cuando uno o más objetos físicos interactúan con ella; [22] la superficie flexible se puede reemplazar fácilmente si es dañada por estos objetos. La patente establece que "los dispositivos de sensores táctiles pueden utilizarse como una pantalla táctil".
Muchas fuentes derivadas [23] [24] [25] describen retrospectivamente a Boie como un gran avance con su tecnología de pantalla táctil; pero no se ha encontrado evidencia de que Boie haya desarrollado o patentado una pantalla táctil capacitiva multitáctil resistente, que pudiera detectar a través de una capa protectora rígida (el tipo que luego se requirió para un teléfono móvil). [26] Muchas de estas citas se basan en evidencia anecdótica de Bill Buxton de Bell Labs. [27] Sin embargo, Bill Buxton no tuvo mucha suerte al conseguir esta tecnología. Como afirma en la cita: "Nuestra suposición (falsa, como resultó) era que la tecnología de Boie estaría disponible para nosotros en un futuro cercano. Alrededor de 1990 llevé a un grupo de Xerox a ver esta tecnología porque sentí que sería apropiada para la interfaz de usuario de nuestros grandes procesadores de documentos. Esto no funcionó".
HASTA 1984 CAPACITANCIA - Aunque, como se mencionó anteriormente, a Johnson se le atribuye el desarrollo de las primeras pantallas táctiles capacitivas y resistivas operadas con los dedos en 1965, estas funcionaban tocando directamente cables a lo largo del frente de la pantalla. [9] Stumpe y Beck desarrollaron una pantalla táctil de autocapacitancia en 1972 y una pantalla táctil de capacitancia mutua en 1977. Ambos dispositivos solo podían detectar el dedo mediante el tacto directo o a través de una fina película aislante. [28] Esta tenía 11 micrones de espesor según el informe de Stumpe de 1977. [29]

1984 PRIMERA PATENTE DE PANTALLA TÁCTIL CAPACITANTE PROYECTADA: un inventor británico, Ron Binstead, inventó un teclado y una pantalla táctil capacitivos, capaces de realizar funciones multitáctiles, que podían "proyectar" la detección táctil a través de varios centímetros de aire y otros materiales no conductores. [30] Esto permitió la detección precisa de dedos a través de un vidrio muy grueso e incluso de doble acristalamiento (consulte el teclado para ver la imagen). [31] La funcionalidad enormemente aumentada se debió a que en ese momento se disponía de una potencia de procesamiento mucho mayor y al uso de una forma simple de inteligencia artificial (consulte la reivindicación de patente 1). Inicialmente, se utilizó una computadora Acorn BBC para procesar los datos. Esta técnica más tarde se conoció como capacitancia proyectada .
La capacitancia proyectada utiliza una forma simple de inteligencia artificial para medir los cambios en la capacitancia causados por uno o más dedos, al perfilar específicamente los efectos de capacitancia esperados para el tacto de los dedos y eliminar cualquier cambio de capacitancia medido atribuible a otros eventos globales y/o locales. [32]
En lugar de un teclado, el dispositivo podría utilizarse como un área de detección continua x/y (véase la reivindicación 9). Se podía utilizar una versión transparente como pantalla táctil de capacitancia proyectada (véase la reivindicación 10), pero su tamaño era limitado debido a la alta resistencia de las pistas estrechas y transparentes de óxido de indio y estaño (numeradas 96 en la imagen) utilizadas para vincular todas las zonas de detección (80, 82, 84, 86, 88, 90) de forma independiente a un borde común.
1984 TOUCHPAD - Fujitsu lanzó un panel táctil para el Micro 16 para adaptarse a la complejidad de los caracteres kanji , que se almacenaban como gráficos en mosaico . [33]
TABLETA GRÁFICA DE 1986: se lanzó una tableta gráfica táctil para Sega AI Computer . [34] [35]
EVALUACIÓN DE PRINCIPIOS DE LOS 80 PARA AVIONES - A principios de los años 80 se evaluaron las unidades de control y visualización (CDU) sensibles al tacto para las cabinas de vuelo de los aviones comerciales. Las investigaciones iniciales demostraron que una interfaz táctil reduciría la carga de trabajo del piloto, ya que la tripulación podría seleccionar puntos de referencia, funciones y acciones, en lugar de estar "con la cabeza agachada" escribiendo latitudes, longitudes y códigos de puntos de referencia en un teclado. Una integración eficaz de esta tecnología tenía como objetivo ayudar a las tripulaciones de vuelo a mantener un alto nivel de conocimiento de la situación de todos los aspectos principales de las operaciones del vehículo, incluida la ruta de vuelo, el funcionamiento de varios sistemas de la aeronave y las interacciones humanas momento a momento. [36]
PRINCIPIOS DE LOS 80 EVALUACIÓN PARA AUTOMÓVILES - también, a principios de los 80, General Motors encargó a su división Delco Electronics un proyecto destinado a reemplazar las funciones no esenciales de un automóvil (es decir, distintas del acelerador , la transmisión , el frenado y la dirección ) de los sistemas mecánicos o electromecánicos con alternativas de estado sólido siempre que fuera posible. El dispositivo terminado se denominó ECC por "Centro de control electrónico", un sistema de control de software y computadora digital conectado a varios sensores periféricos , servomecanismos , solenoides , antena y una pantalla táctil CRT monocromática que funcionaba como pantalla y único método de entrada. [37] El ECC reemplazó los controles y pantallas mecánicos tradicionales del estéreo , el ventilador, la calefacción y el aire acondicionado , y fue capaz de proporcionar información muy detallada y específica sobre el estado operativo acumulativo y actual del vehículo en tiempo real . El ECC era un equipo estándar en el Buick Riviera 1985-1989 y más tarde en el Buick Reatta 1988-1989 , pero era impopular entre los consumidores, en parte debido a la tecnofobia de algunos clientes tradicionales de Buick , pero principalmente debido a los costosos problemas técnicos que sufría la pantalla táctil del ECC que hacía imposible el control del clima o el funcionamiento del estéreo. [38]
TABLETA GRÁFICA DE 1985 - Sega lanzó la Terebi Oekaki, también conocida como Sega Graphic Board, para la consola de videojuegos SG-1000 y la computadora doméstica SC-3000 . Consistía en un lápiz de plástico y una placa de plástico con una ventana transparente donde se detectaban las pulsaciones del lápiz. Se usaba principalmente con una aplicación de software de dibujo. [39]
1985 CAPACITANCIA MULTITÁCTIL: el grupo de la Universidad de Toronto, incluido Bill Buxton, desarrolló una tableta multitáctil que utilizaba capacitancia en lugar de voluminosos sistemas de detección óptica basados en cámaras (ver Historia del multitáctil ).
1985 USO PARA PUNTO DE VENTA: El primer software gráfico de punto de venta (POS) disponible comercialmente se demostró en la computadora a color Atari 520ST de 16 bits . Presentaba una interfaz de widgets con pantalla táctil a color. [40] El software de punto de venta ViewTouch [41] fue mostrado por primera vez por su desarrollador, Gene Mosher, en el área de demostración de Atari Computer de la exposición COMDEX de otoño de 1986. [42]
1987 SE INVENTA LA PRIMERA PANTALLA TÁCTIL CAPACITANTE PROYECTADA DE GRAN TAMAÑO - El inventor británico Ron Binstead inventó una gran pantalla táctil capacitiva proyectada. [43] Esta pantalla detectaba los dedos a través de un vidrio muy grueso y doble acristalamiento, lo que permitía que las pantallas táctiles se pudieran manejar a través de los escaparates de las tiendas. Se conectaron 16 zonas de detección táctil directamente a los cuatro bordes de la pantalla táctil (ver imagen insertada), evitando así la necesidad de pistas estrechas que unieran las zonas de detección al borde. Se realizó un pedido de 0,7 millones de dólares de estas pantallas táctiles para su uso en una cadena hotelera estadounidense. [44]
TECLAS TÁCTILES CAPACITANTES DE 1987 - Casio lanzó la computadora de bolsillo Casio PB-1000 con una pantalla táctil que consta de una matriz de 4×4, lo que da como resultado 16 áreas táctiles en su pequeña pantalla gráfica LCD.
1988 SELECCIONAR EN "DESPEGUE" - Las pantallas táctiles tenían mala reputación de ser imprecisas hasta 1988. La mayoría de los libros de interfaz de usuario afirmaban que las selecciones de pantalla táctil se limitaban a objetivos más grandes que el dedo promedio. En ese momento, las selecciones se hacían de tal manera que se seleccionaba un objetivo tan pronto como el dedo pasaba sobre él, y la acción correspondiente se realizaba inmediatamente. Los errores eran comunes, debido a problemas de paralaje o calibración, lo que conducía a la frustración del usuario. La "estrategia de despegue" [45] fue introducida por investigadores del Laboratorio de Interacción Hombre-Computadora (HCIL) de la Universidad de Maryland. A medida que los usuarios tocan la pantalla, se proporciona retroalimentación sobre lo que se seleccionará: los usuarios pueden ajustar la posición del dedo, y la acción se lleva a cabo solo cuando el dedo se levanta de la pantalla. Esto permitió la selección de objetivos pequeños, hasta un solo píxel en una pantalla de matriz de gráficos de video (VGA) de 640 × 480 (un estándar de esa época).
EXPOSICIÓN MUNDIAL DE 1988 - De abril a octubre de 1988, la ciudad de Brisbane , Australia, albergó la Expo 88 , cuyo tema fue "el ocio en la era de la tecnología". Para apoyar el evento y proporcionar información a los visitantes de la exposición, Telecom Australia (ahora Telstra ) erigió 8 quioscos alrededor del sitio de la exposición con un total de 56 consolas de información de pantalla táctil, que eran estaciones de trabajo Sony Videotex especialmente modificadas . Cada sistema también estaba equipado con un reproductor de videodisco, parlantes y un disco duro de 20 MB. Para mantener la información actualizada durante el evento, la base de datos de información de los visitantes se actualizaba y se transfería de forma remota a las terminales de computadora cada noche. Usando las pantallas táctiles, los visitantes podían encontrar información sobre las atracciones, espectáculos, instalaciones y áreas circundantes de la exposición. Los visitantes también podían seleccionar entre información mostrada en inglés y japonés; un reflejo del mercado turístico extranjero de Australia en la década de 1980. Vale la pena señalar que el sistema Expo Info de Telecom se basó en un sistema anterior empleado en la Expo 86 en Vancouver , Canadá . [46]
GESTOS DE TOQUE MÚLTIPLE Y MÚLTIPLE EN 1990 - Sears et al. (1990) [47] hicieron una revisión de la investigación académica sobre la interacción humano-computadora de toque único y múltiple de la época, describiendo gestos como girar perillas, ajustar controles deslizantes y deslizar la pantalla para activar un interruptor (o un gesto en forma de U para un interruptor de palanca). El equipo de HCIL desarrolló y estudió pequeños teclados de pantalla táctil (incluido un estudio que mostró que los usuarios podían escribir a 25 ppm en un teclado de pantalla táctil), lo que ayudó a su introducción en dispositivos móviles. También diseñaron e implementaron gestos multitáctiles como seleccionar un rango de una línea, conectar objetos y un gesto de "tocar y hacer clic" para seleccionar mientras se mantiene la ubicación con otro dedo.
DESLIZADOR DE PANTALLA TÁCTIL E INTERRUPTORES DE PALANCA DE 1990 - HCIL demostró un deslizador de pantalla táctil, [48] que luego se citó como técnica anterior en el litigio de patentes de pantalla de bloqueo entre Apple y otros proveedores de teléfonos móviles con pantalla táctil (en relación con la patente estadounidense 7.657.849 ). [49]
1991 SE CONCEDE LA PRIMERA PATENTE DE CAPACITANCIA PROYECTADA: La solicitud de patente de capacitancia proyectada de 1984 se concede a Binstead Designs de Nottingham, Inglaterra. [30]
1991 CONTROL INERCIAL - De 1991 a 1992, el prototipo PDA Sun Star7 implementó una pantalla táctil con desplazamiento inercial . [50]
RATÓN/TECLADO CAPACITANTE DE 1993: Bob Boie, de AT&T Bell Labs, patentó un ratón o teclado sencillo que detectaba de forma capacitiva un solo dedo a través de un aislante delgado. [51] Aunque no se reivindica ni se menciona en la patente, esta tecnología podría haberse utilizado potencialmente como una pantalla táctil capacitiva.
1993 PRIMER TELÉFONO CON PANTALLA TÁCTIL RESISTIVA: IBM lanzó el IBM Simon , que es el primer teléfono con pantalla táctil.
CONTROLADOR DE JUEGOS ABANDONADO DE PRINCIPIOS DE LOS 90: un primer intento de una consola de juegos portátil con controles de pantalla táctil fue el sucesor previsto por Sega para el Game Gear , aunque el dispositivo finalmente fue archivado y nunca lanzado debido al alto costo de la tecnología de pantalla táctil a principios de los 90.

1994 PRIMERA PATENTE DE PANTALLA TÁCTIL CON CAPACIDAD PROYECTADA X/Y: el inventor británico Ron Binstead inventó un detector de proximidad de entrada múltiple, capacitancia proyectada multiplexada x/y y un panel táctil/pantalla táctil. Este dispositivo era capaz de realizar múltiples toques y podía detectar dedos de manera precisa y confiable a través de capas gruesas de plástico y vidrio. [52] Junto con la patente anterior de los inventores, [30] esta era muy similar a una patente de Apple obtenida 10 años después en 2004. [53]

1994 PRIMERA CAPACITANCIA PROYECTADA BASADA EN CABLES: las pantallas táctiles de Stumpe y Beck (1972/1977, ya citadas) utilizaban pistas de cobre conductoras opacas que oscurecían aproximadamente el 50% de la pantalla (pista de 80 micrones / espacio de 80 micrones). Sin embargo, la llegada de la capacitancia proyectada en 1984, con su capacidad de detección mejorada, indicó que la mayoría de estas pistas podrían eliminarse. Esto resultó ser así y condujo a la invención de una pantalla táctil basada en cables en 1994, donde un cable de 25 micrones de diámetro recubierto de aislamiento reemplazó aproximadamente 30 de estas pistas de 80 micrones de ancho y también podía detectar dedos con precisión a través de un vidrio grueso. El enmascaramiento de la pantalla, causado por el cobre, se redujo del 50% a menos del 0,5%.
El uso de alambre fino significó que pantallas táctiles muy grandes, de varios metros de ancho, podían trazarse sobre una película de soporte de poliéster delgada con un simple trazador de lápiz x/y, [54] eliminando la necesidad de recubrimiento por pulverización catódica, ablación láser, serigrafía o grabado costosos y complicados. La película de pantalla táctil resultante, increíblemente flexible, de menos de 100 micrones de espesor, podía adherirse mediante un adhesivo débil estático o no fijador a un lado de una hoja de vidrio, para detectar a través de ese vidrio. [55] Las primeras versiones de este dispositivo estaban controladas por el microchip PIC16C54.
1994 PRIMER JUEGO DE PUB CON PANTALLA TÁCTIL - El Monopoly SWP (habilidad con premios) de JPM, que apareció en los pubs en 1994, fue la primera máquina en utilizar tecnología de pantalla táctil en lugar de botones (ver Máquina de preguntas / Historia). Utilizaba una versión de 14 pulgadas de esta pantalla táctil de capacitancia proyectada basada en cables de reciente invención y tenía 64 áreas de detección; el patrón de cableado era similar al que se muestra en el diagrama inferior. El patrón en zigzag se introdujo para minimizar los reflejos visuales y evitar la interferencia de muaré entre los cables y los escaneos de línea del monitor. Se vendieron alrededor de 600 de estos para este propósito, a un precio minorista de 50 libras cada uno, lo que era muy barato para la época. [44] Trabajar a través de un vidrio muy grueso lo hacía ideal para su funcionamiento en un entorno "hostil", como un pub. Aunque la luz reflejada de los cables de cobre era perceptible en determinadas condiciones de iluminación, este problema se eliminó utilizando vidrio tintado. El problema de los reflejos se resolvió más tarde utilizando cables más finos (de 10 micrones de diámetro) y recubiertos de negro. A lo largo de la década siguiente, JPM siguió utilizando pantallas táctiles para muchos otros juegos, como "Cluedo" y "Quién quiere ser millonario". [56]
LICENCIAS DE CAPACITANCIA PROYECTADAS PARA 1998: Esta tecnología fue licenciada cuatro años más tarde a Romag Glass Products, que luego se convertiría en Zytronic Displays y Visual Planet en 2003 (consulte la página 4). [57]
PATENTE DE CAPACITANCIA PROYECTADA MULTITÁCTIL PARA MÓVILES DE 2004: Apple patenta su pantalla táctil capacitiva multitáctil para dispositivos móviles. [53]
VIDEOJUEGOS DE 2004 CON PANTALLAS TÁCTILES: Las pantallas táctiles no se empezaron a utilizar de forma popular para los videojuegos hasta el lanzamiento de la Nintendo DS en 2004. [58]
TELÉFONO MÓVIL CON CAPACITANCIA 2007 - El primer teléfono móvil con pantalla táctil capacitiva fue LG Prada , lanzado en mayo de 2007 (que fue antes del lanzamiento del primer iPhone ). [59] Para 2009, los teléfonos móviles con pantalla táctil se estaban poniendo de moda y ganando popularidad rápidamente tanto en dispositivos básicos como avanzados. [60] [61] En el cuarto trimestre de 2009, por primera vez, la mayoría de los teléfonos inteligentes (es decir, no todos los teléfonos móviles) se enviaron con pantallas táctiles en lugar de no táctiles. [62]
VENTAS DE CAPACIDAD RESISTIVA VERSUS CAPACIDAD PROYECTADA EN 2013: en 2007, el 93 % de las pantallas táctiles vendidas eran resistivas y solo el 4 % eran de capacitancia proyectada. En 2013, el 3 % de las pantallas táctiles vendidas eran resistivas y el 96 % eran de capacitancia proyectada (consulte la página 5). [63]
PANTALLAS TÁCTILES CON DETECCIÓN DE FUERZA DE 2015: hasta hace poco, [ ¿cuándo? ] la mayoría de las pantallas táctiles de consumo solo podían detectar un punto de contacto a la vez, y pocas tenían la capacidad de detectar la fuerza con la que se tocaba. Esto ha cambiado con la comercialización de la tecnología multitáctil y el lanzamiento del Apple Watch con una pantalla sensible a la fuerza en abril de 2015.


2015 PRIMERA PATENTE DE PANTALLA TÁCTIL CON "CABLEADO" DIAGONAL - El inventor británico Ron Binstead inventó una nueva disposición de "cableado" diagonal para su uso con pantallas táctiles resistivas y de capacitancia proyectada multitáctil: todos los elementos de E/S provienen de un solo borde y no hay cables conectados ni "zona muerta" alrededor de los otros tres bordes (ver imagen superior a la derecha). La resolución táctil casi se duplica en comparación con la multiplexación x/y. Por ejemplo, 16 E/S x/y crean un máximo de 64 intersecciones de elementos de detección, mientras que 16 E/S diagonales crean 120 intersecciones. [64] [65]
CAPACITANCIA PROYECTADA BISTAT 2015: cuando se utiliza como una pantalla táctil de capacitancia proyectada, en modo de capacitancia mutua, el cableado diagonal requiere que cada línea de E/S sea capaz de cambiar entre dos estados (bistate), una salida algunas veces y una entrada otras veces. Las E/S son entradas la mayor parte del tiempo, pero, una vez en cada escaneo, una de las E/S tiene que tomar su turno para ser una salida, y las E/S de entrada restantes detectan cualquier señal que genere. Por lo tanto, las líneas de E/S pueden tener que cambiar de entrada a salida, y viceversa, muchas veces por segundo. Este nuevo diseño ganó un premio Elektra de Electronics Weekly en 2017. [66]
2021 PRIMERA PATENTE DE PANTALLA TÁCTIL "INFINITAMENTE ANCHA" - Con las pantallas táctiles de matriz x/y estándar, la longitud de los elementos de detección horizontales aumenta a medida que aumenta el ancho de la pantalla táctil. Finalmente, se alcanza un límite en el que la resistencia se vuelve tan grande que la pantalla táctil ya no puede funcionar correctamente.
La patente describe cómo el uso de elementos diagonales garantiza que la longitud de cualquier elemento nunca supere 1,414 veces la altura de la pantalla táctil, sin importar lo ancha que sea. [67] Esto podría reducirse a 1,15 veces la altura, si los elementos diagonales opuestos se intersecan a 60 grados en lugar de 90 grados. La pantalla táctil alargada podría ser controlada por un solo procesador, o los extremos distantes podrían ser controlados de forma totalmente independiente por diferentes procesadores, vinculados por un procesador de sincronización en la sección central superpuesta. El número de intersecciones únicas podría aumentarse permitiendo que los elementos de detección individuales funcionen en dos direcciones opuestas, como se muestra en el diagrama.
Hay varias tecnologías de pantalla táctil, con diferentes métodos de detección del tacto. [47]
Un panel de pantalla táctil resistivo se compone de varias capas delgadas, las más importantes de las cuales son dos capas transparentes eléctricamente resistivas enfrentadas con un espacio delgado entre ellas. La capa superior (la capa que se toca) tiene un revestimiento en la superficie inferior; justo debajo de ella hay una capa resistiva similar sobre su sustrato. Una capa tiene conexiones conductoras a lo largo de sus lados, mientras que la otra a lo largo de la parte superior e inferior. Se aplica un voltaje a una capa y lo detecta la otra. Cuando un objeto, como la punta de un dedo o de un lápiz, presiona hacia abajo sobre la superficie exterior, las dos capas se tocan para conectarse en ese punto. [68] El panel entonces se comporta como un par de divisores de voltaje , un eje a la vez. Al cambiar rápidamente entre cada capa, se puede detectar la posición de la presión en la pantalla.
La tecnología táctil resistiva se utiliza en restaurantes, fábricas y hospitales debido a su alta tolerancia a líquidos y contaminantes. Una de las principales ventajas de la tecnología táctil resistiva es su bajo coste. Además, se pueden utilizar con guantes o utilizando cualquier objeto rígido como sustituto de los dedos, ya que solo se necesita la presión suficiente para que se perciba el tacto. Las desventajas incluyen la necesidad de presionar hacia abajo y el riesgo de daños por objetos afilados. Las pantallas táctiles resistivas también sufren de un contraste más pobre, debido a que tienen reflejos adicionales (es decir, resplandor) de las capas de material colocadas sobre la pantalla. [69] Este tipo de pantalla táctil ha sido utilizado por Nintendo en la familia DS, la familia 3DS y el Wii U GamePad . [70]

Debido a su estructura simple, con muy pocas entradas, las pantallas táctiles resistivas se utilizan principalmente para operaciones de un solo toque, aunque también hay disponibles algunas versiones de dos toques (a menudo descritas como multitáctiles). [71] [72] Sin embargo, hay algunas pantallas táctiles resistivas verdaderamente multitáctiles disponibles. Estas necesitan muchas más entradas y dependen de la multiplexación x/y para mantener baja la cuenta de E/S.
Un ejemplo de una verdadera pantalla táctil resistiva multitáctil [73] puede detectar 10 dedos al mismo tiempo. Tiene 80 conexiones de E/S. Estas posiblemente estén divididas en 34 entradas x/46 salidas y, formando una pantalla táctil con una relación de aspecto estándar de 3:4 con 1564 nodos de detección táctil x/y que se cruzan.
Se podría haber utilizado la multiplexación triestado en lugar de la multiplexación x/y. Esto habría reducido el número de E/S de 80 a 60, creando al mismo tiempo 1770 nodos de detección táctil únicos, sin necesidad de un bisel y con todas las entradas provenientes de un solo borde. [74]
La tecnología de ondas acústicas de superficie (SAW) utiliza ondas ultrasónicas que pasan sobre el panel de la pantalla táctil. Cuando se toca el panel, se absorbe una parte de la onda. El controlador procesa el cambio en las ondas ultrasónicas para determinar la posición del evento táctil. Los paneles de pantalla táctil con ondas acústicas de superficie pueden resultar dañados por elementos externos. Los contaminantes en la superficie también pueden interferir con la funcionalidad de la pantalla táctil.
Los dispositivos SAW tienen una amplia gama de aplicaciones, incluidas líneas de retardo , filtros, correlacionadores y convertidores de CC a CC .


Un panel de pantalla táctil capacitiva consta de un aislante , como el vidrio , recubierto con un conductor transparente , como el óxido de indio y estaño (ITO). [75] Como el cuerpo humano también es un conductor eléctrico, tocar la superficie de la pantalla produce una distorsión del campo electrostático de la pantalla, medible como un cambio en la capacitancia . Se pueden utilizar diferentes tecnologías para determinar la ubicación del toque. Luego, la ubicación se envía al controlador para su procesamiento. Algunas pantallas táctiles utilizan plata en lugar de ITO, ya que el ITO causa varios problemas ambientales debido al uso de indio. [76] [77] [78] [79] El controlador es típicamente un chip de circuito integrado específico de aplicación (ASIC) de semiconductor de óxido de metal complementario (CMOS) , que a su vez generalmente envía las señales a un procesador de señal digital (DSP) CMOS para su procesamiento. [80] [81]
A diferencia de una pantalla táctil resistiva , algunas pantallas táctiles capacitivas no se pueden utilizar para detectar un dedo a través de material aislante eléctrico, como guantes. Esta desventaja afecta especialmente a la usabilidad en productos electrónicos de consumo, como tabletas táctiles y teléfonos inteligentes capacitivos en climas fríos, cuando las personas pueden usar guantes. Se puede superar con un lápiz capacitivo especial o un guante de aplicación especial con un parche bordado de hilo conductor que permita el contacto eléctrico con la punta del dedo del usuario.
Una fuente de alimentación conmutada de baja calidad con un voltaje inestable y ruidoso puede interferir temporalmente con la precisión, exactitud y sensibilidad de las pantallas táctiles capacitivas. [82] [83] [84]
Algunos fabricantes de pantallas capacitivas siguen desarrollando pantallas táctiles más finas y precisas. Las destinadas a dispositivos móviles se están produciendo ahora con tecnología 'in-cell', como en las pantallas Super AMOLED de Samsung , que elimina una capa construyendo los condensadores dentro de la propia pantalla. Este tipo de pantalla táctil reduce la distancia visible entre el dedo del usuario y lo que éste toca en la pantalla, reduciendo el grosor y el peso de la pantalla, algo deseable en los smartphones .
Un condensador de placas paralelas simple tiene dos conductores separados por una capa dieléctrica. La mayor parte de la energía en este sistema se concentra directamente entre las placas. Parte de la energía se derrama en el área fuera de las placas, y las líneas de campo eléctrico asociadas con este efecto se denominan campos de borde. Parte del desafío de hacer un sensor capacitivo práctico es diseñar un conjunto de trazas de circuito impreso que dirijan los campos de borde a un área de detección activa accesible para un usuario. Un condensador de placas paralelas no es una buena opción para un patrón de sensor de este tipo. Colocar un dedo cerca de campos eléctricos de borde agrega área de superficie conductora al sistema capacitivo. La capacidad de almacenamiento de carga adicional agregada por el dedo se conoce como capacitancia del dedo o CF. La capacitancia del sensor sin un dedo presente se conoce como capacitancia parásita o CP.
En esta tecnología básica, sólo un lado del aislante está recubierto con una capa conductora. Se aplica un pequeño voltaje a la capa, lo que da como resultado un campo electrostático uniforme. Cuando un conductor, como un dedo humano, toca la superficie sin revestimiento, se forma dinámicamente un condensador. El controlador del sensor puede determinar la ubicación del contacto indirectamente a partir del cambio en la capacitancia medida desde las cuatro esquinas del panel. Como no tiene partes móviles, es moderadamente duradero pero tiene una resolución limitada, es propenso a señales falsas por acoplamiento capacitivo parásito y necesita calibración durante la fabricación. Por lo tanto, se utiliza con mayor frecuencia en aplicaciones simples como controles industriales y quioscos . [85]
Aunque algunos métodos de detección de capacitancia estándar son proyectivos, en el sentido de que se pueden utilizar para detectar un dedo a través de una superficie no conductora, son muy sensibles a las fluctuaciones de temperatura, que expanden o contraen las placas de detección, lo que provoca fluctuaciones en la capacitancia de estas placas. [86] Estas fluctuaciones dan como resultado mucho ruido de fondo, por lo que se requiere una señal de dedo fuerte para una detección precisa. Esto limita las aplicaciones a aquellas en las que el dedo toca directamente el elemento sensor o se detecta a través de una superficie no conductora relativamente delgada.


La tecnología táctil capacitiva proyectada (PCT; también PCAP) es una variante de la tecnología táctil capacitiva, pero en la que la sensibilidad al tacto, la precisión, la resolución y la velocidad del tacto se han mejorado enormemente mediante el uso de una forma sencilla de inteligencia artificial. Este procesamiento inteligente permite proyectar la detección de los dedos, de forma precisa y fiable, a través de un vidrio muy grueso e incluso de un doble acristalamiento. [87]
La capacitancia proyectada es un método para detectar y rastrear con precisión una variable particular, o un grupo de variables (como dedos), mediante: a) el uso de una forma simple de inteligencia artificial para desarrollar un perfil de los efectos de cambio de capacitancia esperados para esa variable, b) la búsqueda específica de dichos cambios, y c) la eliminación de los cambios de capacitancia medidos que no coinciden con este perfil, atribuibles a variables globales (como temperatura/humedad, acumulación de suciedad, ruido eléctrico) y variables locales (como gotas de lluvia, sombra parcial y manos/codos). Los sensores de capacitancia pueden ser discretos, posiblemente (pero no necesariamente) en una matriz regular, o pueden estar multiplexados. [53]
Supuestos.
En la práctica, se hacen varias suposiciones, tales como: a) los dedos no tocarán la pantalla al "encender", b) un dedo no estará en el mismo lugar durante más de un período de tiempo fijo, y c) los dedos no tocarán todas partes al mismo tiempo.
a) Si un dedo está tocando la pantalla al "encender", entonces, tan pronto como se lo retire, se detectará un gran cambio de capacitancia "antitáctil". Esto le indica al procesador que restablezca los umbrales táctiles y almacene nuevos valores "sin contacto" para cada entrada.
b) La compensación de deriva a largo plazo se utiliza para aumentar o disminuir gradualmente estos umbrales (con tendencia a "no tocar"). Esto compensa los cambios globales de temperatura y humedad. También elimina la posibilidad de que parezca que se toca alguna posición durante demasiado tiempo debido a algún evento "no relacionado con los dedos". Esto podría deberse, por ejemplo, a una hoja mojada que cae sobre la pantalla y se queda pegada a ella.
c) Cuando se debe tomar una decisión sobre la validez de uno o más toques, entonces, el supuesto c) significa que el valor promedio de los cambios medidos para algunas de las entradas con el cambio más pequeño, se puede utilizar para "compensar" los umbrales de toque de las entradas en disputa. Esto minimiza la influencia de las manos y los brazos.
Mediante estos y otros medios, el procesador ajusta constantemente los umbrales táctiles y la sensibilidad táctil de cada entrada. Esto permite detectar con precisión cambios muy pequeños, provocados únicamente por los dedos, a través de capas gruesas o de varios centímetros de aire. [31]
Cuando un objeto conductor, como un dedo, entra en contacto con un panel PCT, distorsiona el campo electrostático local en ese punto. Esto se puede medir como un cambio en la capacitancia. Si un dedo cruza el espacio entre dos de las "pistas", el campo de carga se interrumpe aún más y es detectado por el controlador. La capacitancia se puede cambiar y medir en cada punto individual de la cuadrícula. Este sistema es capaz de rastrear con precisión los toques. [88]
Debido a que la capa superior de un PCT es de vidrio, es más resistente que la tecnología táctil resistiva, que es menos costosa. A diferencia de la tecnología táctil capacitiva tradicional, es posible que un sistema PCT detecte un lápiz óptico pasivo o dedos enguantados.
La humedad en la superficie del panel, la humedad alta o el polvo acumulado no son un problema, especialmente con pantallas táctiles basadas en "alambre fino" debido al hecho de que las pantallas táctiles basadas en alambre tienen una capacitancia "parásita" muy baja y hay una mayor distancia entre los conductores vecinos. La capacitancia proyectada tiene "compensación de deriva a largo plazo" incorporada. Esto minimiza los efectos de los factores ambientales que cambian lentamente, como la acumulación de suciedad y los efectos causados por los cambios en el clima. [87] Las gotas de lluvia tienen poco efecto, pero el agua que fluye, y especialmente el agua de mar que fluye (debido a su conductividad eléctrica), pueden causar problemas a corto plazo.
Se impone una señal de alta frecuencia (RF), posiblemente de 100 kHz a 1 MHz, en una pista a la vez, y se toman las mediciones de capacitancia apropiadas (como se describe más adelante en este artículo). [89] Este proceso se repite hasta que se hayan muestreado todas las pistas.
Las pistas conductoras suelen ser transparentes, un ejemplo es el óxido de indio y estaño (ITO), un conductor eléctrico transparente, pero estas pistas conductoras pueden estar hechas de una malla metálica muy fina y no transparente [90] o de cables finos individuales. [54]

El diseño puede variar dependiendo de si se debe detectar un solo dedo o varios.
Para poder detectar muchos dedos al mismo tiempo, algunas pantallas táctiles PCT modernas están compuestas por miles de teclas discretas, [53] cada una de las cuales está vinculada individualmente al borde de la pantalla táctil. Esto se logra grabando un patrón de rejilla de electrodos en un revestimiento conductor transparente en un lado de una lámina de vidrio o plástico.
Para reducir la cantidad de pistas de entrada, la mayoría de las pantallas táctiles PCT utilizan multiplexación. Esto permite, por ejemplo, reducir 100 (n) entradas de teclas discretas a 20 cuando se utiliza multiplexación x/y, o 15 si se utiliza multiplexación biestatal o multiplexación triestado .
La multiplexación por capacitancia requiere una red de pistas conductoras que se intersecan, pero que están eléctricamente aisladas. Esto se puede lograr de muchas maneras diferentes. Una de ellas es creando pistas conductoras paralelas en un lado de una película de plástico y pistas paralelas similares en el otro lado, orientadas a 90 grados con respecto al primer lado. [91] [92]
Otra forma es grabar pistas en láminas de vidrio separadas y unir estas láminas, con pistas en ángulos rectos entre sí, cara a cara utilizando una fina capa intermedia adhesiva no conductora. [93]
Una alternativa sencilla es incrustar una rejilla en diagonal o en x/y de cables conductores muy finos recubiertos de material aislante en una película fina de poliéster. Esta película puede luego adherirse a un lado de una lámina de vidrio para operar a través del vidrio. [54]
La resolución táctil y la cantidad de dedos que se pueden detectar simultáneamente están determinadas por la cantidad de puntos de cruce (x * y). Si x + y = n, entonces la cantidad máxima posible de cruces es (n/2) 2 . Sin embargo, la cantidad de puntos de cruce se puede casi duplicar utilizando un diseño de red diagonal (ver Diagramas de pantalla táctil de red/diagonal) donde, en lugar de que x elementos solo crucen y elementos, cada elemento conductor cruza todos los demás elementos. En estas circunstancias, la cantidad máxima de cruces es (n 2 -n)/2. [74] Todas las entradas del conector provienen de un solo borde.
Vea el video (arriba) de datos sin procesar de una pantalla táctil cableada en diagonal con 32 entradas.


En 2015, Ron Binstead de Binstead Designs Ltd. inventó y patentó una nueva matriz diagonal adecuada para una variedad de tecnologías de pantalla táctil y teclado. [94] [65] [95]
El diagrama (izquierda) muestra cómo un grupo de 6 elementos conductores paralelos, plegados sobre sí mismos (en ángulos rectos), puede crear una matriz triangular de 15 intersecciones únicas. Una matriz x/y, con 6 elementos conductores, solo habría creado un máximo de 9 intersecciones únicas.
Aunque los elementos conductores normalmente están conectados a un terminal en un extremo del conductor, el diagrama de la izquierda muestra que estos elementos plegados pueden terminarse en el pliegue, formando así elementos divididos (o bifurcados).
Se puede formar una matriz diagonal cuadrada o rectangular doblando dos veces los conductores paralelos (véase el diagrama de la derecha). Se pueden colocar dos conectores en los pliegues, en lados opuestos de la matriz. Alternativamente, se puede colocar un solo conector en un extremo de la matriz (como se muestra en el diagrama). [64] [65] [96]
Pantallas táctiles cilíndricas.

Los elementos de detección diagonales también se pueden formar en una matriz cilíndrica sin costuras. El diagrama de la derecha muestra un diseño cilíndrico biestatal dividido con 9 E/S , con 36 intersecciones únicas: todas las líneas de E/S conectadas a un extremo del cilindro (una matriz x/y estándar requeriría líneas de E/S horizontales que ingresen por el costado del cilindro). Los elementos de detección diagonales sin dividir también se pueden formar en cilindros, pero 9 E/S solo crearían 20 intersecciones únicas (5x4). Estos cilindros se pueden transformar físicamente en formas tridimensionales complejas mediante una variedad de métodos diferentes, como moldeo por soplado, formación al vacío, etc.
Es posible un diseño similar para una pantalla LED cilíndrica complementaria: consulte Charlieplexing#Matrices diagonales .
Pantallas táctiles infinitamente anchas.
El ancho de la pantalla táctil normalmente está limitado por la resistencia del material conductor utilizado. A medida que aumenta el ancho de una pantalla táctil x/y, con el tiempo la resistencia de los conductores horizontales se vuelve demasiado grande para que la pantalla táctil funcione correctamente. Sin embargo, es posible obtener pantallas táctiles "infinitamente" anchas cuando se utiliza cableado diagonal, porque las longitudes de las pistas son siempre 1,414 x la altura de la pantalla táctil y son independientes del ancho de la pantalla táctil (consulte el diagrama de la derecha [97] ).
Existen dos tipos de PCT: capacitancia mutua y autocapacitancia.
Una señal eléctrica aplicada a un conductor eléctrico puede ser "detectada" capacitivamente por otro conductor eléctrico que se encuentra muy cerca, pero eléctricamente aislado, una característica que se aprovecha en las pantallas táctiles de capacitancia mutua. En una matriz de sensores capacitivos mutuos, el cruce "mutuo" de un conductor eléctrico con otro conductor eléctrico, pero sin contacto eléctrico directo, forma un capacitor (ver pantalla táctil#Construcción).
Se aplican pulsos de voltaje de alta frecuencia a estos conductores, uno a la vez. Estos pulsos se acoplan capacitivamente a cada conductor que los intersecta.
Al acercar un dedo o un lápiz conductor a la superficie del sensor, se modifica el campo electrostático local, lo que a su vez reduce la capacitancia entre estos conductores que se cruzan. Cualquier cambio significativo en la intensidad de la señal detectada se utiliza para determinar si hay un dedo o no en una intersección. [98]
Se puede medir el cambio de capacitancia en cada intersección de la cuadrícula para determinar con precisión una o más ubicaciones de contacto.
La capacitancia mutua permite una operación multitáctil donde se pueden rastrear con precisión varios dedos, palmas o lápices al mismo tiempo. Cuanto mayor sea el número de intersecciones, mejor será la resolución táctil y más dedos independientes se pueden detectar. [99] [100] Esto indica una clara ventaja del cableado diagonal sobre el cableado x/y estándar, ya que el cableado diagonal crea casi el doble de intersecciones.

Por ejemplo, una matriz x/y de 16×14 y 30 entradas/salidas tendría 224 de estas intersecciones/condensadores, y una matriz reticular diagonal de 30 entradas/salidas podría tener 435 intersecciones.
Cada traza de una matriz de capacitancia mutua x/y tiene una sola función: es una entrada o una salida. Las trazas horizontales pueden ser transmisores, mientras que las verticales son sensores, o viceversa.
Sin embargo, las trazas de una matriz de capacitancia mutua diagonal tienen que cambiar continuamente su funcionalidad, "sobre la marcha", mediante un proceso llamado multiplexación biestatal o multiplexación triestado . Algunas veces una traza será una salida, otras veces será una entrada o estará "conectada a tierra". Se puede utilizar una tabla de "consulta" para simplificar este proceso. Al distorsionar ligeramente los conductores en una matriz diagonal de E/S "n", se forma el equivalente de una matriz (n-1) por (n/2). Después de la decodificación de direcciones, esto se puede procesar como una matriz x/y estándar.
Los sensores de autocapacidad pueden tener la misma disposición de cuadrícula X/Y o diagonal [74] que los sensores de capacidad mutua, pero, con la autocapacidad, todas las trazas suelen funcionar de forma independiente, sin interacción entre las diferentes trazas. Junto con varios otros métodos, la carga capacitiva adicional de un dedo sobre un electrodo de traza se puede medir con un medidor de corriente o mediante el cambio de frecuencia de un oscilador RC. [101]
Se detectan los rastros uno tras otro hasta que se detectan todos. Se puede detectar un dedo en cualquier lugar a lo largo de un rastro (incluso "fuera de la pantalla"), pero no hay ninguna indicación de dónde se encuentra el dedo a lo largo de ese rastro. Sin embargo, si también se detecta un dedo a lo largo de otro rastro que se cruza, se supone que la posición del dedo está en la intersección de los dos rastros. Esto permite la detección rápida y precisa de un solo dedo.
Sin embargo, existe una ambigüedad si se debe detectar más de un dedo. [102] Dos dedos pueden tener cuatro posibles posiciones de detección, de las cuales solo dos son verdaderas, y las otras dos son "fantasmas". Sin embargo, al desensibilizar selectivamente los puntos de contacto en disputa, los resultados conflictivos se resuelven fácilmente. [103] Esto permite utilizar la autocapacitancia para la operación de dos toques.
Aunque la capacitancia mutua es más simple para el multitáctil, el multitáctil se puede lograr utilizando autocapacitancia.

Si el trazo que se está detectando se cruza con otro trazo que tiene una señal "desensibilizante", entonces esa intersección es insensible al tacto. Al imponer dicha señal "desensibilizante" en todos los trazos que se cruzan, excepto uno, a lo largo del trazo que se está detectando, entonces sólo una pequeña parte de ese trazo será sensible al tacto. [103] Al seleccionar una secuencia de estas secciones de detección a lo largo del trazo, es posible determinar la posición precisa de múltiples dedos a lo largo de un trazo. Este proceso puede repetirse luego para todos los demás trazos hasta que se haya escaneado toda la pantalla.
Las capas de pantalla táctil autocapacitivas se utilizan en teléfonos móviles como el Sony Xperia Sola , [104] el Samsung Galaxy S4 , el Galaxy Note 3 , el Galaxy S5 y el Galaxy Alpha .
La autocapacidad es mucho más sensible que la capacitancia mutua y se utiliza principalmente para un solo toque, gestos simples y detección de proximidad donde el dedo ni siquiera tiene que tocar la superficie de vidrio. La capacitancia mutua se utiliza principalmente para aplicaciones multitáctiles. [105] Muchos fabricantes de pantallas táctiles utilizan tecnologías de capacitancia propia y mutua en el mismo producto, combinando así sus beneficios individuales. [106]

Cuando se utiliza una matriz X/Y de 16 x 14 para determinar la posición de un solo dedo por autocapacidad, se requieren 30 mediciones de capacitancia (es decir, 16 + 14). El dedo se determina como la intersección de la más fuerte de las 16 mediciones x y la más fuerte de las 14 mediciones y. Sin embargo, cuando se utiliza la capacitancia mutua, es posible que se deban medir todas las intersecciones, lo que da un total de 224 mediciones de capacitancia (es decir, 16 x 14). En este ejemplo, por lo tanto, la capacitancia mutua requiere casi 7 veces más mediciones que la autocapacidad para detectar la posición de un dedo.
Muchas aplicaciones, como seleccionar elementos de una lista o menú, requieren solo un dedo, y la autocapacitancia es eminentemente adecuada para tales aplicaciones, debido a la carga de procesamiento relativamente baja, el método de procesamiento más simple, la capacidad de detectar a través de materiales dieléctricos gruesos o aire, y la posibilidad de reducir la cantidad de entradas requeridas, a través de diseños de pistas repetidas. [107]
Sin embargo, para muchas otras aplicaciones, como expandir o contraer elementos en la pantalla y para otros gestos, es necesario rastrear dos o más dedos.
Se pueden detectar y rastrear con precisión dos dedos mediante la autocapacidad, pero esto implica algunos cálculos adicionales y cuatro mediciones de capacitancia adicionales para eliminar las dos posiciones "fantasma". Un método consiste en realizar un escaneo completo de la autocapacidad para detectar las cuatro posiciones ambiguas de los dedos y, a continuación, utilizar solo cuatro mediciones de capacitancia mutua específicas para descubrir cuáles dos de las cuatro posiciones son válidas y cuáles dos no. Esto da un total de 34 mediciones, aún mucho menos que las 224 necesarias cuando se utiliza solo la capacitancia mutua.
Con 3 dedos, se requieren 9 desambiguaciones; con 4 dedos, 16 desambiguaciones, etc.
Si se dispone de más dedos, se puede decidir que el proceso de desambiguación es demasiado complicado. Si se dispone de suficiente potencia de procesamiento, se puede pasar a un escaneo de capacitancia mutua completo. [103]
Las pantallas táctiles capacitivas no tienen por qué manejarse necesariamente con el dedo, pero hasta hace poco los lápices especiales necesarios podían resultar bastante caros de adquirir. El coste de esta tecnología ha bajado mucho en los últimos años y ahora se pueden conseguir lápices capacitivos por un precio simbólico y, a menudo, se regalan con los accesorios móviles. Estos lápices consisten en un eje conductor de electricidad con una punta de goma conductora blanda, que conecta de forma resistiva los dedos a la punta del lápiz.

Una pantalla táctil infrarroja utiliza una matriz de pares de fotodetectores y LED infrarrojos XY alrededor de los bordes de la pantalla para detectar una interrupción en el patrón de haces de LED. Estos haces de LED se cruzan entre sí en patrones verticales y horizontales. Esto ayuda a los sensores a detectar la ubicación exacta del toque. Una ventaja importante de un sistema de este tipo es que puede detectar esencialmente cualquier objeto opaco, incluido un dedo, un dedo enguantado, un lápiz o un bolígrafo. Generalmente se utiliza en aplicaciones al aire libre y sistemas POS que no pueden depender de un conductor (como un dedo desnudo) para activar la pantalla táctil. A diferencia de las pantallas táctiles capacitivas , las pantallas táctiles infrarrojas no requieren ningún patrón en el vidrio, lo que aumenta la durabilidad y la claridad óptica del sistema general. Las pantallas táctiles infrarrojas son sensibles a la suciedad y al polvo que pueden interferir con los rayos infrarrojos, y sufren paralaje en superficies curvas y pulsaciones accidentales cuando el usuario pasa un dedo sobre la pantalla mientras busca el elemento que desea seleccionar.
Se utiliza una lámina de acrílico translúcido como pantalla de retroproyección para mostrar información. Los bordes de la lámina de acrílico están iluminados por LED infrarrojos y las cámaras infrarrojas se enfocan en la parte posterior de la lámina. Los objetos colocados sobre la lámina son detectables por las cámaras. Cuando el usuario toca la lámina, la reflexión interna total frustrada da como resultado una fuga de luz infrarroja que alcanza su punto máximo en los puntos de máxima presión, lo que indica la ubicación del toque del usuario. Las tabletas PixelSense de Microsoft utilizan esta tecnología.
Las pantallas táctiles ópticas son un desarrollo relativamente moderno en la tecnología de pantallas táctiles, en la que se colocan dos o más sensores de imagen (como sensores CMOS ) alrededor de los bordes (principalmente las esquinas) de la pantalla. Las luces de fondo infrarrojas se colocan en el campo de visión del sensor en el lado opuesto de la pantalla. Un toque bloquea algunas luces de los sensores y se puede calcular la ubicación y el tamaño del objeto en contacto (consulte casco visual ). Esta tecnología está creciendo en popularidad debido a su escalabilidad, versatilidad y asequibilidad para pantallas táctiles más grandes.
Introducido en 2002 por 3M , este sistema detecta un toque mediante el uso de sensores para medir la piezoelectricidad en el vidrio. Algoritmos complejos interpretan esta información y proporcionan la ubicación real del toque. [108] La tecnología no se ve afectada por el polvo y otros elementos externos, incluidos los arañazos. Dado que no hay necesidad de elementos adicionales en la pantalla, también afirma proporcionar una excelente claridad óptica. Cualquier objeto se puede utilizar para generar eventos táctiles, incluidos los dedos enguantados. Una desventaja es que después del toque inicial, el sistema no puede detectar un dedo inmóvil. Sin embargo, por la misma razón, los objetos en reposo no interrumpen el reconocimiento táctil.
La clave de esta tecnología es que un toque en cualquier posición de la superficie genera una onda de sonido en el sustrato que luego produce una señal combinada única medida por tres o más transductores diminutos unidos a los bordes de la pantalla táctil. La señal digitalizada se compara con una lista correspondiente a cada posición en la superficie, determinando la ubicación del toque. Un toque en movimiento se rastrea mediante una rápida repetición de este proceso. Los sonidos extraños y ambientales se ignoran ya que no coinciden con ningún perfil de sonido almacenado. La tecnología se diferencia de otras tecnologías basadas en el sonido al utilizar un método de búsqueda simple en lugar de un costoso hardware de procesamiento de señales. Al igual que con el sistema de tecnología de señal dispersiva, no se puede detectar un dedo inmóvil después del toque inicial. Sin embargo, por la misma razón, el reconocimiento táctil no se ve interrumpido por ningún objeto en reposo. La tecnología fue creada por SoundTouch Ltd a principios de la década de 2000, como se describe en la familia de patentes EP1852772, y presentada al mercado por la división Elo de Tyco International en 2006 como Reconocimiento de pulsos acústicos. [109] La pantalla táctil que utiliza Elo está hecha de vidrio común, lo que le otorga una buena durabilidad y claridad óptica. La tecnología generalmente conserva la precisión a pesar de los rayones y el polvo en la pantalla. La tecnología también es adecuada para pantallas que son físicamente más grandes.
Existen varias formas principales de construir una pantalla táctil. Los objetivos principales son reconocer uno o más dedos que tocan una pantalla, interpretar el comando que esto representa y comunicar el comando a la aplicación correspondiente.
Pantallas de capacitancia proyectadas multitáctiles


Una forma muy sencilla y de bajo coste de fabricar una pantalla táctil capacitiva proyectada multitáctil es intercalar una matriz x/y o diagonal de finos cables de cobre o tungsteno recubiertos de aislamiento entre dos capas de película de poliéster transparente. Esto crea una matriz de microcondensadores de detección de proximidad . Uno de estos microcondensadores cada 10 a 15 mm es probablemente suficiente espacio si los dedos están relativamente separados, pero la multitáctil con una discriminación muy alta puede necesitar un microcondensador cada 5 o 6 mm. Se puede utilizar un sistema similar para la detección de resolución ultraalta, como la detección de huellas dactilares. Los sensores de huellas dactilares requieren un espaciado de microcondensadores de aproximadamente 44 a 50 micrones. [110]
Las pantallas táctiles se pueden fabricar en casa, utilizando herramientas y materiales fácilmente disponibles, o se puede hacer de forma industrial.
En primer lugar, se genera un patrón de cableado de "traza continua" utilizando un sistema CAD simple.
El alambre se pasa a través de un bolígrafo trazador y se traza directamente, como un alambre continuo, sobre una lámina fina de película de poliéster transparente recubierta de adhesivo (como "película para ventanas"), utilizando un trazador de bolígrafo x/y estándar de bajo costo. [54] Después del trazado, el alambre único se corta suavemente en secciones individuales con un bisturí afilado, teniendo cuidado de no dañar la película.
Se lamina una segunda película de poliéster idéntica sobre la primera. A continuación, se recorta la película de pantalla táctil resultante para darle forma y se le coloca un conector.
El producto final es extremadamente flexible, con un grosor de aproximadamente 75 micrones (aproximadamente el grosor de un cabello humano). Incluso se puede doblar sin perder funcionalidad.
La película se puede montar sobre superficies no conductoras (o ligeramente conductoras) o detrás de ellas. Normalmente, se monta detrás de una lámina de vidrio de hasta 12 mm de espesor (o más), para detectar a través del vidrio.
Este método es adecuado para una amplia gama de tamaños de pantalla táctil, desde muy pequeñas hasta de varios metros de ancho, o incluso más anchas, si se utiliza una matriz cableada en diagonal. [74] [67]
El producto final es respetuoso con el medio ambiente, ya que utiliza poliéster reciclable y cantidades minúsculas de alambre de cobre. La película podría incluso tener una segunda vida como otro producto, como película para dibujar o para envolver. A diferencia de otras tecnologías de pantalla táctil, no se utilizan procesos complejos ni materiales raros.
Para aplicaciones que no sean de pantalla táctil, se pueden utilizar otros plásticos (por ejemplo, vinilo o ABS ). La película se puede moldear por soplado o por calor para darle formas tridimensionales complejas, como botellas, globos terráqueos o salpicaderos de automóviles. Como alternativa, los cables se pueden incrustar en plástico grueso, como paneles de carrocería de fibra de vidrio o fibra de carbono.
Pantallas táctiles resistivas de un solo toque
En el enfoque resistivo, que solía ser la técnica más popular, normalmente hay cuatro capas:
Cuando un usuario toca la superficie, el sistema registra el cambio en la corriente eléctrica que fluye a través de la pantalla.
Señal dispersiva
La tecnología de señal dispersiva mide el efecto piezoeléctrico : el voltaje generado cuando se aplica fuerza mecánica a un material que se produce químicamente cuando se toca un sustrato de vidrio reforzado.
Infrarrojo
Existen dos métodos basados en infrarrojos. En uno, una serie de sensores detectan el contacto o casi contacto de un dedo con la pantalla, interrumpiendo así los rayos de luz infrarroja proyectados sobre ella. En el otro, unas cámaras infrarrojas montadas en la parte inferior registran el calor producido por el contacto con la pantalla.
En cada caso, el sistema determina el comando deseado basándose en los controles que se muestran en la pantalla en ese momento y la ubicación del toque.
El desarrollo de pantallas multitáctiles facilitó el seguimiento de más de un dedo sobre la pantalla, por lo que se pueden realizar operaciones que requieren más de un dedo. Estos dispositivos también permiten que varios usuarios interactúen con la pantalla táctil simultáneamente.
Con el creciente uso de pantallas táctiles, el costo de la tecnología de pantallas táctiles se absorbe rutinariamente en los productos que la incorporan y se elimina casi por completo. La tecnología de pantallas táctiles ha demostrado ser confiable y se encuentra en aviones, automóviles, consolas de juegos, sistemas de control de máquinas, electrodomésticos y dispositivos de visualización portátiles, incluidos los teléfonos celulares; se proyectó que el mercado de pantallas táctiles para dispositivos móviles produciría 5 mil millones de dólares estadounidenses para 2009. [111] [ necesita actualización ]
La capacidad de apuntar con precisión sobre la pantalla también está avanzando con los híbridos de pantalla y tableta gráfica emergentes . El fluoruro de polivinilideno (PVDF) desempeña un papel importante en esta innovación debido a sus altas propiedades piezoeléctricas, que permiten que la tableta detecte la presión, haciendo que cosas como la pintura digital se comporten más como el papel y el lápiz. [112]
TapSense, anunciado en octubre de 2011, permite que las pantallas táctiles distingan qué parte de la mano se utilizó para la entrada de datos, como la punta del dedo, el nudillo o la uña. Esto podría utilizarse de diversas maneras, por ejemplo, para copiar y pegar, poner letras en mayúscula, activar diferentes modos de dibujo, etc. [113] [114]
Para que las pantallas táctiles sean dispositivos de entrada eficaces, los usuarios deben poder seleccionar objetivos con precisión y evitar la selección accidental de objetivos adyacentes. El diseño de las interfaces de las pantallas táctiles debe reflejar las capacidades técnicas del sistema, la ergonomía , la psicología cognitiva y la fisiología humana .
Las primeras directrices para el diseño de pantallas táctiles se desarrollaron en la década de 2000, basándose en investigaciones tempranas y en el uso real de sistemas más antiguos, que normalmente utilizaban rejillas infrarrojas, que dependían en gran medida del tamaño de los dedos del usuario. Estas directrices son menos relevantes para la mayor parte de los dispositivos táctiles modernos que utilizan tecnología táctil capacitiva o resistiva. [115] [116]
Desde mediados de la década de 2000, los fabricantes de sistemas operativos para teléfonos inteligentes han promulgado estándares, pero estos varían entre fabricantes y permiten una variación significativa en el tamaño según los cambios tecnológicos, por lo que no son adecuados desde una perspectiva de factores humanos . [117] [118] [119]
Mucho más importante es la precisión que tienen los humanos al seleccionar objetivos con el dedo o un lápiz óptico. La precisión de la selección del usuario varía según la posición en la pantalla: los usuarios son más precisos en el centro, menos en los bordes izquierdo y derecho, y menos precisos en el borde superior y especialmente en el borde inferior. La precisión R95 (radio necesario para una precisión del 95 % del objetivo) varía de 7 mm (0,28 pulgadas) en el centro a 12 mm (0,47 pulgadas) en las esquinas inferiores. [120] [121] [122] [123] [124] Los usuarios son conscientes de esto de forma subconsciente y tardan más en seleccionar objetivos más pequeños o en los bordes o esquinas de la pantalla táctil. [125]
Esta imprecisión del usuario es resultado de la paralaje , la agudeza visual y la velocidad del circuito de retroalimentación entre los ojos y los dedos. La precisión del dedo humano por sí solo es mucho, mucho mayor que esto, por lo que cuando se proporcionan tecnologías de asistencia, como lupas en pantalla, los usuarios pueden mover su dedo (una vez en contacto con la pantalla) con una precisión de tan solo 0,1 mm (0,004 pulgadas). [126] [ dudoso – discutir ]
Los usuarios de dispositivos portátiles de pantalla táctil los sostienen de distintas maneras y cambian con frecuencia su método de sujeción y selección para adaptarse a la posición y el tipo de entrada. Existen cuatro tipos básicos de interacción con dispositivos portátiles:
Las tasas de uso varían ampliamente. Si bien el toque con dos pulgares es poco frecuente (entre el 1 y el 3 %) en muchas interacciones generales, se utiliza en el 41 % de las interacciones de mecanografía. [127]
Además, los dispositivos suelen colocarse sobre superficies (escritorios o mesas) y las tabletas, en particular, se utilizan en soportes. El usuario puede señalar, seleccionar o hacer gestos en estos casos con el dedo o el pulgar, y variar el uso de estos métodos. [128]
Las pantallas táctiles se utilizan a menudo con sistemas de respuesta háptica . Un ejemplo común de esta tecnología es la retroalimentación vibratoria que se proporciona cuando se pulsa un botón de la pantalla táctil. La tecnología háptica se utiliza para mejorar la experiencia del usuario con las pantallas táctiles proporcionando una retroalimentación táctil simulada, y puede diseñarse para reaccionar de forma inmediata, contrarrestando en parte la latencia de respuesta en pantalla. Una investigación de la Universidad de Glasgow (Brewster, Chohan y Brown, 2007; y más recientemente Hogan) demuestra que los usuarios de pantallas táctiles reducen los errores de entrada (en un 20%), aumentan la velocidad de entrada (en un 20%) y reducen su carga cognitiva (en un 40%) cuando las pantallas táctiles se combinan con tecnología háptica o retroalimentación táctil. Además de esto, un estudio realizado en 2013 por Boston College exploró los efectos que tenía la estimulación háptica de las pantallas táctiles en el desencadenamiento de la propiedad psicológica de un producto. Su investigación concluyó que la capacidad de una pantalla táctil para incorporar grandes cantidades de participación háptica daba como resultado que los clientes sintieran una mayor apropiación de los productos que estaban diseñando o comprando. El estudio también informó que los consumidores que utilizan una pantalla táctil estaban dispuestos a aceptar un precio más alto por los artículos que compraban. [129]
La tecnología de pantalla táctil se ha integrado en muchos aspectos de la industria de servicio al cliente en el siglo XXI. [130] La industria de los restaurantes es un buen ejemplo de la implementación de la pantalla táctil en este dominio. Las cadenas de restaurantes como Taco Bell, [131] Panera Bread y McDonald's ofrecen pantallas táctiles como una opción cuando los clientes piden artículos del menú. [132] Si bien la incorporación de pantallas táctiles es un avance para esta industria, los clientes pueden optar por omitir la pantalla táctil y realizar el pedido a un cajero tradicional. [131] Para llevar esto un paso más allá, un restaurante en Bangalore ha intentado automatizar completamente el proceso de pedido. Los clientes se sientan en una mesa con pantallas táctiles integradas y piden de un extenso menú. Una vez que se realiza el pedido, se envía electrónicamente a la cocina. [133] Este tipo de pantallas táctiles se ajustan a los sistemas de punto de venta (POS) mencionados en la sección principal.
El uso prolongado de interfaces gestuales sin la posibilidad de que el usuario apoye el brazo se conoce como "brazo de gorila". [134] Puede provocar fatiga e incluso lesiones por estrés repetitivo cuando se utiliza de forma rutinaria en un entorno de trabajo. Algunas de las primeras interfaces basadas en lápiz exigían que el operador trabajara en esta posición durante gran parte de la jornada laboral. [135] Permitir que el usuario apoye la mano o el brazo en el dispositivo de entrada o en un marco que lo rodee es una solución para esto en muchos contextos. Este fenómeno se cita a menudo como un ejemplo de movimientos que se deben minimizar mediante un diseño ergonómico adecuado.
Las pantallas táctiles no compatibles aún son bastante comunes en aplicaciones como cajeros automáticos y quioscos de datos, pero no son un problema ya que el usuario típico solo las usa durante períodos breves y muy espaciados. [136]

Las pantallas táctiles pueden sufrir el problema de las huellas dactilares en la pantalla. Esto se puede mitigar mediante el uso de materiales con revestimientos ópticos diseñados para reducir los efectos visibles de los aceites de las huellas dactilares. La mayoría de los teléfonos inteligentes modernos tienen revestimientos oleofóbicos , que reducen la cantidad de residuos de aceite. Otra opción es instalar un protector de pantalla antirreflejos con acabado mate , que crea una superficie ligeramente rugosa que no retiene fácilmente las manchas.
Las pantallas táctiles capacitivas rara vez funcionan cuando el usuario usa guantes. El grosor de los guantes y el material del que están hechos juegan un papel importante en esto y en la capacidad de una pantalla táctil para captar un toque.
Algunos dispositivos tienen un modo que aumenta la sensibilidad de la pantalla táctil. Esto permite que la pantalla táctil se use de manera más confiable con guantes, pero también puede dar como resultado entradas poco confiables y fantasmas. Sin embargo, los guantes delgados, como los guantes médicos, son lo suficientemente delgados para que los usuarios los usen cuando usan pantallas táctiles; se aplican principalmente a tecnología y máquinas médicas.
{{cite journal}}: Requiere citar revista |journal=( ayuda ){{cite journal}}: Requiere citar revista |journal=( ayuda ){{cite journal}}: Requiere citar revista |journal=( ayuda ){{cite journal}}: Requiere citar revista |journal=( ayuda ){{cite journal}}: Requiere citar revista |journal=( ayuda ){{cite journal}}: Requiere citar revista |journal=( ayuda ){{cite book}}: CS1 maint: location missing publisher (link){{cite book}}: CS1 maint: location missing publisher (link){{cite book}}: CS1 maint: location missing publisher (link)

