Cartas sobre SO(3)
Las diversas cartas sobre SO(3) configuran sistemas de coordenadas rivales: en este caso, no se puede decir que exista un conjunto preferido de parámetros que describan cualquier rotación.
El grupo de rotación a menudo se denota SO(3) por las razones explicadas más adelante.
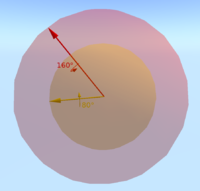
La forma en que se puede usar el radio para especificar el ángulo de rotación no es directa.
Puede relacionarse con círculos de latitud en una esfera con un polo norte definido, y se explica a continuación.
Una rotación con su eje contenido en el plano xy y un ángulo de rotación muy pequeño se puede especificar mediante un corte a través de la esfera paralela al plano xy y muy cerca del polo norte.
Dos rotaciones sucesivas con ejes en el plano xy no darán necesariamente una rotación cuyo eje se encuentre en el plano xy, por lo que no se pueden representar como un punto en la esfera.
Este no será el caso con una rotación general en el espacio de tres dimensiones, que forma un conjunto cerrado bajo la composición.
Por ejemplo, si se usan tres ángulos (los ángulos de Euler), dicha parametrización está degenerada en algunos puntos de la hiperesfera, lo que lleva al problema del bloqueo del cardán.
Se puede evitar este problema utilizando cuatro coordenadas euclídeas w, x, y, z, con w2 + x2 + y2 + z2 = 1.
Las posibles parametrizaciones candidatas incluyen: Existen problemas al usar estas representaciones más allá de un ámbito localizado, que tienen que ver con su naturaleza de valores múltiples y sus singularidades.
Es decir, se debe tener cuidado sobre todo para trabajar solo con difeomorfismos en la definición de una carta.
Los problemas de este tipo son inevitables, ya que SO(3) es difeomorfo con respecto al espacio proyectivo real P3 (R), que es un cociente de S3 al identificar puntos antipodales, y las cartas intentan modelar una variedad usando R3.
Esto explica por qué, por ejemplo, los ángulos de Euler parecen dar una variable en el 3-toro, y los cuaterniones unitarios una 3-esfera.
La singularidad de la representación por los ángulos de Euler se descompone en algunos puntos (véase bloqueo del cardán), mientras que la representación del cuaternión es siempre un doble recubrimiento, con q y -q dando la misma rotación.
Es posible restringir estas matrices a una bola alrededor del origen en R3 para que las rotaciones no excedan los 180 grados, y esto habilitará una correspondencia uno a uno, excepto en las rotaciones de 180 grados, que corresponden hasta el límite S2, y estos identifican puntos antipodales; esto es, el lugar geométrico de corte.
Una situación similar es válida para aplicar una transformada de Cayley a una matriz antisimétrica.
Las transformaciones lineales fraccionarias utilizan cuatro parámetros complejos, a, b, c y d, con la condición de que ad-bc no sea cero.
Pero no todas estas matrices producen rotaciones: también se incluyen aplicaciones conformes en S2.
En última instancia, dado que R3 no es P3(R), habrá un problema con cada uno de estos enfoques.
Por lo tanto, cualquier movimiento rígido del cuerpo conduce directamente a SO(3), cuando se factoriza la parte de traslación.