En geometría , un hiperboloide de revolución , a veces llamado hiperboloide circular , es la superficie generada al rotar una hipérbola alrededor de uno de sus ejes principales . Un hiperboloide es la superficie obtenida a partir de un hiperboloide de revolución al deformarlo mediante escalados direccionales o, más generalmente, de una transformación afín .
Un hiperboloide es una superficie cuadrática , es decir, una superficie definida como el conjunto cero de un polinomio de grado dos en tres variables. Entre las superficies cuadráticas, un hiperboloide se caracteriza por no ser un cono o un cilindro , tener un centro de simetría e intersecar muchos planos en hipérbolas. Un hiperboloide tiene tres ejes de simetría perpendiculares entre sí y tres planos de simetría perpendiculares entre sí .
Dado un hiperboloide, se puede elegir un sistema de coordenadas cartesianas tal que el hiperboloide esté definido por una de las siguientes ecuaciones: o Los ejes de coordenadas son los ejes de simetría del hiperboloide y el origen es el centro de simetría del hiperboloide. En cualquier caso, el hiperboloide es asintótico al cono de las ecuaciones:
Se tiene un hiperboloide de revolución si y sólo si En caso contrario, los ejes están definidos de forma única ( hasta el intercambio del eje x y el eje y ).
Existen dos tipos de hiperboloides. En el primer caso ( +1 en el lado derecho de la ecuación): un hiperboloide de una sola hoja , también llamado hiperboloide hiperbólico . Es una superficie conexa , que tiene una curvatura gaussiana negativa en cada punto. Esto implica que cerca de cada punto la intersección del hiperboloide y su plano tangente en el punto consta de dos ramas de curva que tienen tangentes distintas en el punto. En el caso del hiperboloide de una sola hoja, estas ramas de curvas son líneas y, por lo tanto, el hiperboloide de una sola hoja es una superficie doblemente reglada .
En el segundo caso ( −1 en el lado derecho de la ecuación): un hiperboloide de dos láminas , también llamado hiperboloide elíptico . La superficie tiene dos componentes conexas y una curvatura gaussiana positiva en cada punto. La superficie es convexa en el sentido de que el plano tangente en cada punto interseca la superficie solo en este punto.

Se pueden definir coordenadas cartesianas para los hiperboloides, de forma similar a las coordenadas esféricas , manteniendo el ángulo acimutal θ ∈ [0, 2 π ) , pero cambiando la inclinación v en funciones trigonométricas hiperbólicas :
Hiperboloide de una superficie: v ∈ (−∞, ∞)
Hiperboloide de dos superficies: v ∈ [0, ∞)


La siguiente representación paramétrica incluye hiperboloides de una lámina, dos láminas y su cono límite común, cada uno con el eje como eje de simetría:
Se puede obtener una representación paramétrica de un hiperboloide con un eje de coordenadas diferente al eje de simetría cambiando la posición del término al componente apropiado en la ecuación anterior.
De manera más general, un hiperboloide orientado arbitrariamente, centrado en v , se define mediante la ecuación donde A es una matriz y x , v son vectores .
Los vectores propios de A definen las direcciones principales del hiperboloide y los valores propios de A son los recíprocos de los cuadrados de los semiejes: , y . El hiperboloide de una hoja tiene dos valores propios positivos y un valor propio negativo. El hiperboloide de dos hojas tiene un valor propio positivo y dos valores propios negativos.
Si el hiperboloide tiene la ecuación entonces las líneas
están contenidos en la superficie.
En caso de que el hiperboloide sea una superficie de revolución y se pueda generar rotando una de las dos líneas o , que están sesgadas al eje de rotación (ver imagen). Esta propiedad se llama teorema de Wren . [1] La generación más común de un hiperboloide de revolución de una hoja es rotar una hipérbola alrededor de su semieje menor (ver imagen; rotar la hipérbola alrededor de su otro eje da una hipérbola de revolución de dos hojas).
Un hiperboloide de una hoja es proyectivamente equivalente a un paraboloide hiperbólico .
Para simplificar, se consideran las secciones planas del hiperboloide unitario con ecuación . Como un hiperboloide en posición general es una imagen afín del hiperboloide unitario, el resultado también se aplica al caso general.
Obviamente, cualquier hiperboloide de revolución de una sola hoja contiene círculos. Esto también es cierto, aunque menos obvio, en el caso general (véase la sección circular ).
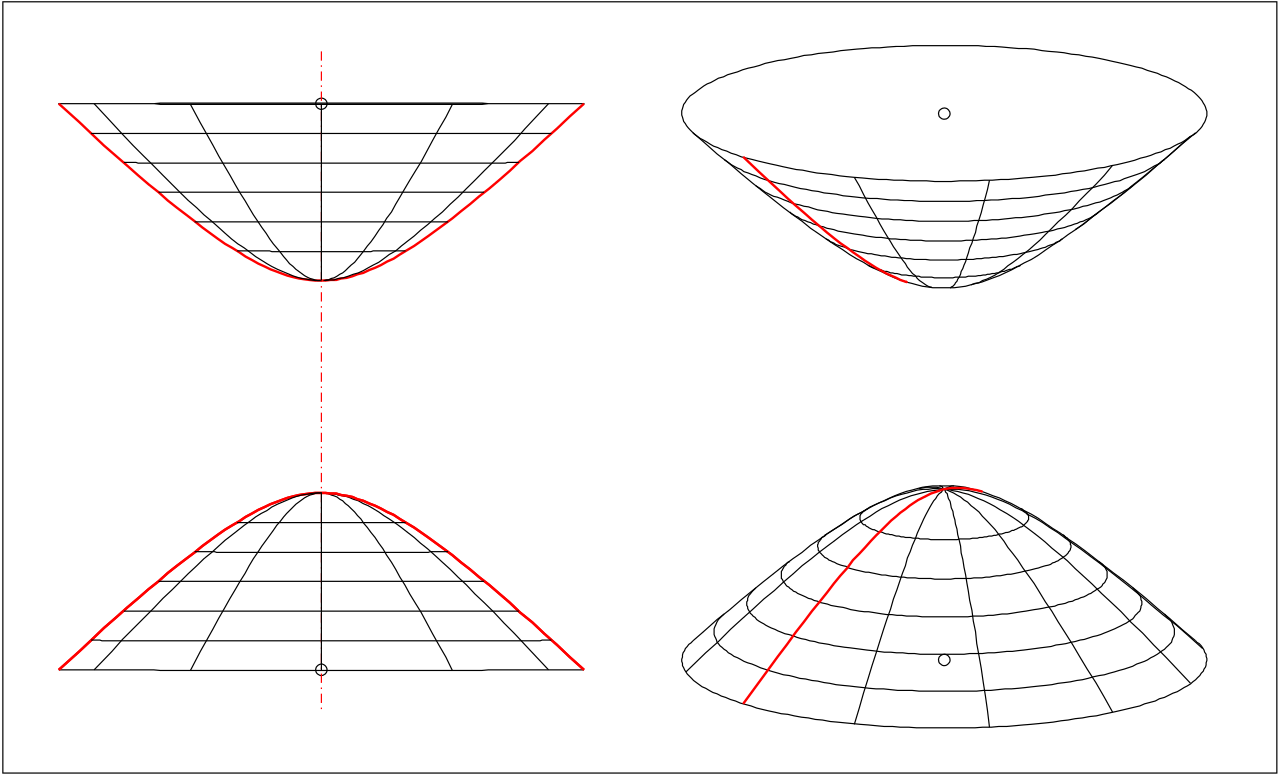

El hiperboloide de dos láminas no contiene líneas. La discusión de las secciones planas se puede realizar para el hiperboloide unitario de dos láminas con ecuación que se puede generar mediante una hipérbola rotatoria alrededor de uno de sus ejes (el que corta a la hipérbola).
Obviamente, cualquier hiperboloide de revolución de dos hojas contiene círculos. Esto también es cierto, aunque menos obvio, en el caso general (véase la sección circular ).
Observación: Un hiperboloide de dos láminas es proyectivamente equivalente a una esfera.
Los hiperboloides con ecuaciones son
Mientras que la curvatura gaussiana de un hiperboloide de una lámina es negativa, la de un hiperboloide de dos láminas es positiva. A pesar de su curvatura positiva, el hiperboloide de dos láminas con otra métrica adecuadamente elegida también puede utilizarse como modelo para la geometría hiperbólica.
Los hiperboloides imaginarios se encuentran con frecuencia en las matemáticas de dimensiones superiores. Por ejemplo, en un espacio pseudoeuclidiano se utiliza una forma cuadrática : Cuando c es cualquier constante , entonces la parte del espacio dada por se llama hiperboloide . El caso degenerado corresponde a c = 0 .
Como ejemplo, considere el siguiente pasaje: [4]
... los vectores de velocidad siempre se encuentran sobre una superficie que Minkowski llama hiperboloide de cuatro dimensiones ya que, expresada en términos de coordenadas puramente reales ( y 1 , ..., y 4 ) , su ecuación es y2
1+ y2
2+ y2
3- y2
4= −1 , análogo al hiperboloide y2
1+ y2
2- y2
3= −1 del espacio tridimensional. [6]
Sin embargo, el término cuasiesfera también se utiliza en este contexto, ya que la esfera y el hiperboloide tienen algunos puntos en común (véase § Relación con la esfera más abajo).
Los hiperboloides de una sola hoja se utilizan en la construcción, con estructuras llamadas estructuras hiperboloides . Un hiperboloide es una superficie doblemente reglada ; por lo tanto, se puede construir con vigas de acero rectas, produciendo una estructura fuerte a un costo menor que otros métodos. Los ejemplos incluyen torres de refrigeración , especialmente de centrales eléctricas , y muchas otras estructuras .



En 1853, William Rowan Hamilton publicó sus Lectures on Quaternions (Conferencias sobre cuaterniones) , que incluían una presentación de los biquaterniones . El siguiente pasaje de la página 673 muestra cómo Hamilton utiliza el álgebra de biquaterniones y los vectores de los cuaterniones para producir hiperboloides a partir de la ecuación de una esfera :
... la ecuación de la esfera unitaria ρ 2 + 1 = 0 , y cambiamos el vector ρ a una forma bivectorial , como σ + τ √ −1 . La ecuación de la esfera se descompone entonces en el sistema de las dos siguientes,
σ 2 − τ 2 + 1 = 0 , S . στ = 0 ;y sugiere que consideremos σ y τ como dos vectores reales y rectangulares, tales que
Tτ = ( Tσ 2 − 1 ) 1/2 .De aquí se deduce fácilmente que si suponemos σ || λ , donde λ es un vector en una posición dada, el nuevo vector real σ + τ terminará en la superficie de un hiperboloide equilátero y de doble hoja ; y que si, por otra parte, suponemos τ || λ , entonces el lugar geométrico del extremo del vector real σ + τ será un hiperboloide equilátero pero de una sola hoja . El estudio de estos dos hiperboloides está, por tanto, conectado de esta manera de forma muy sencilla, a través de biquaterniones, con el estudio de la esfera; ...
En este pasaje, S es el operador que da la parte escalar de un cuaternión, y T es el "tensor", ahora llamado norma , de un cuaternión.
Una visión moderna de la unificación de la esfera y el hiperboloide utiliza la idea de una sección cónica como un corte de una forma cuadrática . En lugar de una superficie cónica , se requieren hipersuperficies cónicas en el espacio de cuatro dimensiones con puntos p = ( w , x , y , z ) ∈ R 4 determinados por formas cuadráticas . Primero, considere la hipersuperficie cónica
Entonces es la esfera con radio r . Por otro lado, la hipersuperficie cónica
En la teoría de formas cuadráticas , una cuasiesférica unitaria es el subconjunto de un espacio cuadrático X que consiste en x ∈ X tal que la norma cuadrática de x es uno. [7]













































