Estudio de la deformación de sólidos que entran en contacto entre sí.
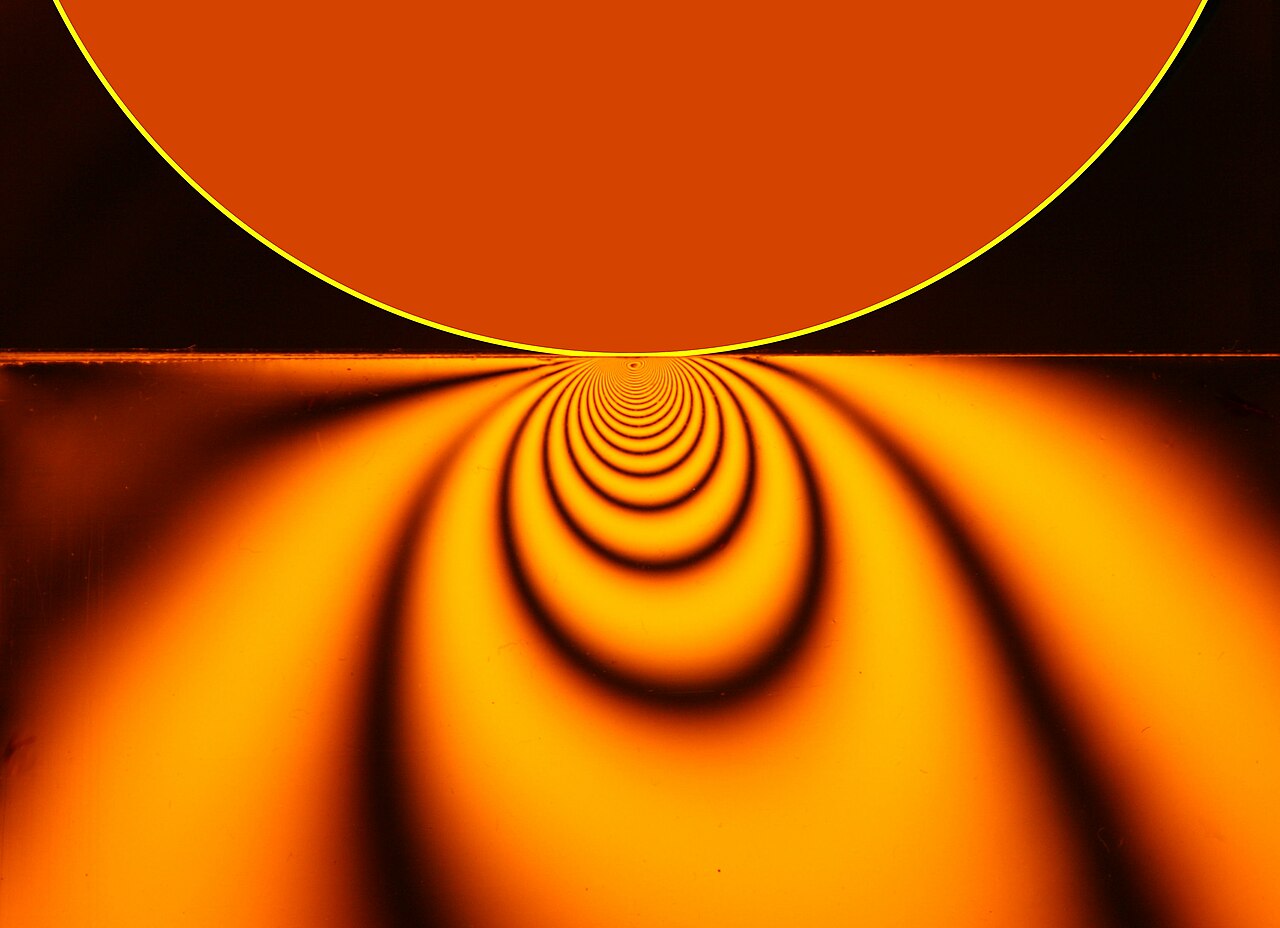
Tensiones en una zona de contacto cargada simultáneamente con una fuerza normal y una tangencial. Las tensiones se hicieron visibles mediante fotoelasticidad .
La mecánica de contacto es el estudio de la deformación de los sólidos que se tocan entre sí en uno o más puntos. [1] [2] Una distinción central en la mecánica de contacto es entre las tensiones que actúan perpendicularmente a las superficies de los cuerpos en contacto (conocidas como tensión normal ) y las tensiones de fricción que actúan tangencialmente entre las superficies ( tensión cortante ). La mecánica de contacto normal o mecánica de contacto sin fricción se centra en las tensiones normales causadas por las fuerzas normales aplicadas y por la adhesión presente en superficies en estrecho contacto, incluso si están limpias y secas. La mecánica de contacto por fricción enfatiza el efecto de las fuerzas de fricción.
El trabajo original en mecánica de contacto se remonta a 1881 con la publicación del artículo "Sobre el contacto de sólidos elásticos" [3] "Über die Berührung fester elastischer Körper" de Heinrich Hertz . Hertz intentó comprender cómo las propiedades ópticas de múltiples lentes apiladas podrían cambiar con la fuerza que las mantiene juntas. La tensión de contacto hertziana se refiere a las tensiones localizadas que se desarrollan cuando dos superficies curvas entran en contacto y se deforman ligeramente bajo las cargas impuestas. Esta cantidad de deformación depende del módulo de elasticidad del material en contacto. Da la tensión de contacto como una función de la fuerza de contacto normal, los radios de curvatura de ambos cuerpos y el módulo de elasticidad de ambos cuerpos. La tensión de contacto hertziana forma la base de las ecuaciones para las capacidades de soporte de carga y la vida útil por fatiga en cojinetes, engranajes y cualquier otro cuerpo donde dos superficies estén en contacto.
Historia
Una animación de una esfera presionando contra un material elástico, aumentando el área de contacto.
La mecánica de contacto clásica se asocia principalmente con Heinrich Hertz. [3] [4] En 1882, Hertz resolvió el problema de contacto de dos cuerpos elásticos con superficies curvas. Esta solución clásica, aún relevante, proporciona una base para los problemas modernos en mecánica de contacto. Por ejemplo, en ingeniería mecánica y tribología , la tensión de contacto hertziana es una descripción de la tensión dentro de las piezas acopladas. La tensión de contacto hertziana generalmente se refiere a la tensión cercana al área de contacto entre dos esferas de diferentes radios.
No fue hasta casi cien años después que Kenneth L. Johnson , Kevin Kendall y Alan D. Roberts encontraron una solución similar para el caso del contacto adhesivo . [5] Esta teoría fue rechazada por Boris Derjaguin y colaboradores [6] quienes propusieron una teoría diferente de la adhesión [7] en la década de 1970. El modelo de Derjaguin llegó a ser conocido como el modelo Derjaguin–Muller–Toporov (DMT) (en honor a Derjaguin, MV Muller y Yu. P. Toporov), [7] y el modelo de Johnson et al. llegó a ser conocido como el modelo Johnson–Kendall–Roberts (JKR) para el contacto elástico adhesivo. Este rechazo resultó ser instrumental en el desarrollo de los parámetros de David Tabor [8] y posteriormente de Daniel Maugis [6] [9] que cuantifican qué modelo de contacto (de los modelos JKR y DMT) representa mejor el contacto adhesivo para materiales específicos.
A mediados del siglo XX, se produjeron más avances en el campo de la mecánica de contacto gracias a nombres como Frank Philip Bowden y Tabor. Bowden y Tabor fueron los primeros en destacar la importancia de la rugosidad de la superficie de los cuerpos en contacto. [10] [11] Mediante la investigación de la rugosidad de la superficie, se descubrió que el área de contacto real entre los socios de fricción es menor que el área de contacto aparente. Esta comprensión también cambió drásticamente la dirección de los trabajos en tribología. Los trabajos de Bowden y Tabor dieron lugar a varias teorías sobre la mecánica de contacto de superficies rugosas.
Las contribuciones de JF Archard (1957) [12] también deben mencionarse en la discusión de trabajos pioneros en este campo. Archard concluyó que, incluso para superficies elásticas rugosas, el área de contacto es aproximadamente proporcional a la fuerza normal . Otros conocimientos importantes en esta línea fueron proporcionados por Jonh A. Greenwood y JBP Williamson (1966), [13] AW Bush (1975), [14] y Bo NJ Persson (2002). [15] Los principales hallazgos de estos trabajos fueron que la superficie de contacto real en materiales rugosos es generalmente proporcional a la fuerza normal, mientras que los parámetros de microcontactos individuales (presión y tamaño del microcontacto) solo dependen débilmente de la carga.
Soluciones clásicas para el contacto elástico no adhesivo
La teoría del contacto entre cuerpos elásticos se puede utilizar para encontrar áreas de contacto y profundidades de indentación para geometrías simples. A continuación se enumeran algunas soluciones de uso común. La teoría utilizada para calcular estas soluciones se analiza más adelante en el artículo. Se pueden encontrar soluciones para una multitud de otras formas técnicamente relevantes, por ejemplo, el cono truncado, la esfera desgastada, los perfiles rugosos, los cilindros huecos, etc. en [16].
Contacto entre una esfera y un semiespacio
Contacto de una esfera elástica con un semiespacio elástico
Una esfera elástica de radio indenta un semiespacio elástico donde la deformación total es , lo que provoca un área de contacto de radio
La fuerza aplicada está relacionada con el desplazamiento por [4]
La distribución de la presión normal en el área de contacto en función de la distancia desde el centro del círculo es [1]
¿Dónde está la presión de contacto máxima dada por
El radio del círculo está relacionado con la carga aplicada por la ecuación
La deformación total está relacionada con la presión de contacto máxima por
La tensión cortante máxima se produce en el interior en .
Contacto entre dos esferas
Contacto entre dos esferasContacto entre dos cilindros cruzados de igual radio
Para el contacto entre dos esferas de radios y , el área de contacto es un círculo de radio . Las ecuaciones son las mismas que para una esfera en contacto con un semiplano excepto que el radio efectivo se define como [4]
Contacto entre dos cilindros cruzados de igual radio
Esto es equivalente al contacto entre una esfera de radio y un plano .
Contacto entre un cilindro rígido con extremo plano y un semiespacio elástico
Contacto entre un penetrador cilíndrico rígido y un semiespacio elástico
Si se presiona un cilindro rígido en un semiespacio elástico, se crea una distribución de presión descrita por [17].
¿Dónde está el radio del cilindro y
La relación entre la profundidad de la sangría y la fuerza normal está dada por
Contacto entre un penetrador cónico rígido y un semiespacio elástico
Contacto entre un penetrador cónico rígido y un semiespacio elástico
En el caso de la indentación de un semiespacio elástico del módulo de Young utilizando un indentador cónico rígido , la profundidad de la región de contacto y el radio de contacto están relacionados por [17]
Se define como el ángulo entre el plano y la superficie lateral del cono. La profundidad total de la indentación viene dada por:
En contacto entre dos cilindros con ejes paralelos, la fuerza es linealmente proporcional a la longitud de los cilindros L y a la profundidad de indentación d : [18]
Los radios de curvatura están completamente ausentes de esta relación. El radio de contacto se describe mediante la relación habitual
con
como en contacto entre dos esferas. La presión máxima es igual a
Contacto del cojinete
El contacto en el caso de los rodamientos es a menudo un contacto entre una superficie convexa (cilindro macho o esfera) y una superficie cóncava (cilindro hembra o esfera: orificio o copa hemisférica ).
Método de reducción de dimensionalidad
Contacto entre una esfera y un semiespacio elástico y modelo unidimensional reemplazado
Algunos problemas de contacto pueden resolverse con el método de reducción de dimensionalidad (MDR). En este método, el sistema tridimensional inicial se reemplaza por un contacto de un cuerpo con una base elástica o viscoelástica lineal (ver figura). Las propiedades de los sistemas unidimensionales coinciden exactamente con las del sistema tridimensional original, si se modifica la forma de los cuerpos y se definen los elementos de la base según las reglas del MDR. [19] [20] El MDR se basa en la solución de problemas de contacto axisimétricos obtenida por primera vez por Ludwig Föppl (1941) y Gerhard Schubert (1942) [21]
Sin embargo, para obtener resultados analíticos exactos, se requiere que el problema de contacto sea axisimétrico y que los contactos sean compactos.
Teoría hertziana del contacto elástico no adhesivo
La teoría clásica del contacto se centraba principalmente en el contacto no adhesivo, en el que no se permite que se produzca ninguna fuerza de tensión dentro del área de contacto, es decir, los cuerpos en contacto se pueden separar sin fuerzas de adhesión. Se han utilizado varios enfoques analíticos y numéricos para resolver problemas de contacto que satisfacen la condición de no adhesión. Se transmiten fuerzas y momentos complejos entre los cuerpos donde se tocan, por lo que los problemas de mecánica de contacto pueden volverse bastante sofisticados. Además, las tensiones de contacto suelen ser una función no lineal de la deformación. Para simplificar el procedimiento de solución, se suele definir un marco de referencia en el que los objetos (posiblemente en movimiento relativo entre sí) son estáticos. Interactúan a través de tracciones superficiales (o presiones/tensiones) en su interfaz.
Como ejemplo, considere dos objetos que se encuentran en alguna superficie en el plano ( , ) con el eje y se supone normal a la superficie. Uno de los cuerpos experimentará una distribución de presión dirigida normalmente y distribuciones de tracción superficial en el plano y sobre la región . En términos de un equilibrio de fuerzas newtoniano , las fuerzas:
deben ser iguales y opuestas a las fuerzas establecidas en el otro cuerpo. Los momentos correspondientes a estas fuerzas:
También se requiere que las fuerzas entre los cuerpos se cancelen para que sean cinemáticamente inmóviles.
Supuestos de la teoría hertziana
Para determinar las soluciones de los problemas de contacto hertziano se realizan las siguientes suposiciones :
Las deformaciones son pequeñas y están dentro del límite elástico.
Las superficies son continuas y no conformes (lo que implica que el área de contacto es mucho menor que las dimensiones características de los cuerpos en contacto).
Cada cuerpo puede considerarse un semiespacio elástico.
Las superficies no tienen fricción.
Surgen complicaciones adicionales cuando se violan algunos o todos estos supuestos y dichos problemas de contacto suelen denominarse no hertzianos .
Técnicas de solución analítica
Contacto entre dos esferas
Los métodos analíticos de solución para el problema del contacto no adhesivo se pueden clasificar en dos tipos según la geometría del área de contacto. [22] Un contacto conforme es aquel en el que los dos cuerpos se tocan en múltiples puntos antes de que se produzca cualquier deformación (es decir, simplemente "encajan"). Un contacto no conforme es aquel en el que las formas de los cuerpos son lo suficientemente diferentes como para que, bajo carga cero, solo se toquen en un punto (o posiblemente a lo largo de una línea). En el caso no conforme, el área de contacto es pequeña en comparación con los tamaños de los objetos y las tensiones están altamente concentradas en esta área. Tal contacto se llama concentrado , de lo contrario se llama diversificado .
Un enfoque común en la elasticidad lineal es superponer una serie de soluciones, cada una de las cuales corresponde a una carga puntual que actúa sobre el área de contacto. Por ejemplo, en el caso de la carga de un semiplano , la solución de Flamant se utiliza a menudo como punto de partida y luego se generaliza a varias formas del área de contacto. Los equilibrios de fuerza y momento entre los dos cuerpos en contacto actúan como restricciones adicionales a la solución.
Punto de contacto en un semiplano (2D)
Esquema de la carga sobre un plano por la fuerza P en un punto (0, 0)
Un punto de partida para resolver problemas de contacto es comprender el efecto de una "carga puntual" aplicada a un semiplano elástico isótropo, homogéneo y lineal, como se muestra en la figura de la derecha. El problema puede ser de tensión plana o de deformación plana . Se trata de un problema de valor límite de elasticidad lineal sujeto a las condiciones límite de tracción :
donde es la función delta de Dirac . Las condiciones de contorno establecen que no hay tensiones cortantes en la superficie y se aplica una fuerza normal singular P en (0, 0). La aplicación de estas condiciones a las ecuaciones de elasticidad que rigen el resultado produce el siguiente resultado:
para algún punto, , en el semiplano. El círculo que se muestra en la figura indica una superficie en la que el esfuerzo cortante máximo es constante. A partir de este campo de esfuerzos, se pueden determinar los componentes de deformación y, por lo tanto, los desplazamientos de todos los puntos materiales.
Contacto de línea en un semiplano (2D)
Carga normal sobre una región
Supongamos que, en lugar de una carga puntual , se aplica una carga distribuida a la superficie, en el rango . Se puede aplicar el principio de superposición lineal para determinar el campo de tensión resultante como solución a las ecuaciones integrales :
Carga de corte sobre una región
El mismo principio se aplica a las cargas sobre la superficie en el plano de la superficie. Este tipo de tracciones tenderían a surgir como resultado de la fricción. La solución es similar a la anterior (tanto para cargas singulares como para cargas distribuidas ) pero ligeramente modificada:
Estos resultados pueden superponerse a los dados anteriormente para la carga normal para hacer frente a cargas más complejas.
Punto de contacto en un semiespacio (3D)
De manera análoga a la solución de Flamant para el semiplano 2D, también se conocen soluciones fundamentales para el semiespacio 3D elástico lineal. Estas fueron encontradas por Boussinesq para una carga normal concentrada y por Cerruti para una carga tangencial. Véase la sección sobre este tema en Elasticidad lineal .
Técnicas de solución numérica
No es necesario hacer distinciones entre contacto conforme y no conforme cuando se emplean esquemas de solución numérica para resolver problemas de contacto. Estos métodos no dependen de suposiciones adicionales dentro del proceso de solución, ya que se basan únicamente en la formulación general de las ecuaciones subyacentes. [23] [24] [25] [26] [27] Además de las ecuaciones estándar que describen la deformación y el movimiento de los cuerpos, se pueden formular dos desigualdades adicionales. La primera simplemente restringe el movimiento y la deformación de los cuerpos mediante el supuesto de que no puede ocurrir penetración. Por lo tanto, la brecha entre dos cuerpos solo puede ser positiva o cero.
donde denota contacto. El segundo supuesto en la mecánica de contacto está relacionado con el hecho de que no se permite que se produzca ninguna fuerza de tensión dentro del área de contacto (los cuerpos en contacto pueden levantarse sin fuerzas de adhesión). Esto conduce a una desigualdad que las tensiones deben obedecer en la interfaz de contacto. Se formula para la tensión normal .
En los lugares donde hay contacto entre las superficies, el espacio es cero, es decir , y allí la tensión normal es diferente de cero, de hecho, . En los lugares donde las superficies no están en contacto, la tensión normal es idéntica a cero; , mientras que el espacio es positivo; es decir, . Este tipo de formulación de complementariedad se puede expresar en la llamada forma de Kuhn-Tucker , a saber:
Estas condiciones son válidas de manera general. La formulación matemática del espacio depende de la cinemática de la teoría subyacente del sólido (por ejemplo, sólido lineal o no lineal en dos o tres dimensiones, modelo de viga o cáscara ). Al reformular la tensión normal en términos de la presión de contacto, ; es decir, el problema de Kuhn-Tucker puede reformularse como en la forma de complementariedad estándar, es decir En el caso elástico lineal, el espacio puede formularse como donde es la separación del cuerpo rígido, es la geometría/topografía del contacto (cilindro y rugosidad) y es la deformación/deflexión elástica. Si los cuerpos en contacto se aproximan como semiespacios elásticos lineales, la solución de la ecuación integral de Boussinesq-Cerruti puede aplicarse para expresar la deformación ( ) como una función de la presión de contacto ( ); es decir, donde para la carga lineal de un semiespacio elástico y para la carga puntual de un semiespacio elástico. [1]
Después de la discretización, el problema de mecánica de contacto elástico lineal se puede plantear en la forma estándar del problema de complementariedad lineal (LCP). [28]
donde es una matriz, cuyos elementos son los llamados coeficientes de influencia que relacionan la presión de contacto y la deformación. La formulación LCP estricta del problema CM presentada anteriormente permite la aplicación directa de técnicas de solución numérica bien establecidas, como el algoritmo de pivoteo de Lemke . El algoritmo de Lemke tiene la ventaja de que encuentra la solución numéricamente exacta dentro de un número finito de iteraciones. La implementación de MATLAB presentada por Almqvist et al. es un ejemplo que se puede emplear para resolver el problema numéricamente. Además, un código de ejemplo para una solución LCP de un problema de mecánica de contacto elástico lineal 2D también se ha hecho público en MATLAB file exchange por Almqvist et al.
Contacto entre superficies rugosas
Cuando dos cuerpos con superficies rugosas se presionan uno contra el otro, el área de contacto real formada entre los dos cuerpos, , es mucho más pequeña que el área de contacto aparente o nominal . La mecánica del contacto de superficies rugosas se analiza en términos de mecánica de contacto normal e interacciones de fricción estática. [29] Las superficies naturales y de ingeniería suelen presentar características de rugosidad, conocidas como asperezas, en una amplia gama de escalas de longitud hasta el nivel molecular, con estructuras de superficie que exhiben autoafinidad, también conocida como fractalidad de superficie . Se reconoce que la estructura autoafín de las superficies es el origen de la escala lineal del área de contacto real con la presión aplicada. [30] [31] Suponiendo un modelo de contactos soldados de corte en interacciones tribológicas , esta linealidad observada de forma ubicua entre el área de contacto y la presión también puede considerarse el origen de la linealidad de la relación entre la fricción estática y la fuerza normal aplicada. [29]
En contacto entre una superficie "rugosa aleatoria" y un semiespacio elástico, el área de contacto real está relacionada con la fuerza normal por [1] [31] [32] [33]
con igual a la raíz cuadrada media (también conocida como media cuadrática) de la pendiente de la superficie y . La presión media en la superficie de contacto real
puede estimarse razonablemente como la mitad del módulo elástico efectivo multiplicado por el cuadrado medio de la pendiente de la superficie .
Una visión general del modelo GW
Greenwood y Williamson en 1966 (GW) [31] propusieron una teoría de la mecánica de contacto elástico de superficies rugosas que es hoy la base de muchas teorías en tribología (fricción, adhesión, conductancia térmica y eléctrica, desgaste, etc.). Consideraron el contacto entre un plano rígido liso y una superficie rugosa deformable nominalmente plana cubierta con asperezas de punta redondeada del mismo radio R. Su teoría supone que la deformación de cada aspereza es independiente de la de sus vecinas y se describe mediante el modelo de Hertz. Las alturas de las asperezas tienen una distribución aleatoria. La probabilidad de que la altura de la aspereza esté entre y es . Los autores calcularon el número de puntos de contacto n, el área de contacto total y la carga total P en el caso general. Dieron esas fórmulas en dos formas: en la básica y utilizando variables estandarizadas. Si uno supone que N asperezas cubren una superficie rugosa, entonces el número esperado de contactos es
El área total de contacto esperada se puede calcular a partir de la fórmula
y la fuerza total esperada está dada por
dónde:
R, radio de curvatura de la microasperidad,
z, altura de la microasperidad medida desde la línea del perfil,
d, cerrar la superficie,
, módulo de elasticidad de Young compuesto,
, módulo de elasticidad de la superficie,
, Coeficientes de superficie de Poisson.
Greenwood y Williamson introdujeron la separación estandarizada y la distribución estandarizada de alturas cuya desviación estándar es igual a uno. A continuación se presentan las fórmulas en forma estandarizada.
dónde:
d es la separación,
es el área de contacto nominal,
es la densidad superficial de las asperezas,
es el módulo de Young efectivo.
y se puede determinar cuando los términos se calculan para las superficies dadas utilizando la convolución de la rugosidad de la superficie . [34] Varios estudios han seguido los ajustes de curva sugeridos para asumir una distribución alta de superficie gaussiana con ajustes de curva presentados por Arcoumanis et al. [35] y Jedynak [36] entre otros. Se ha observado repetidamente que las superficies de ingeniería no demuestran distribuciones de altura de superficie gaussianas, por ejemplo, Peklenik. [37] Leighton et al. [38] presentaron ajustes para superficies de revestimiento de cilindro de motor IC con trama cruzada junto con un proceso para determinar los términos para cualquier superficie medida. Leighton et al. [38] demostraron que los datos de ajuste gaussiano no son precisos para modelar ninguna superficie diseñada y continuaron demostrando [39] que el funcionamiento temprano de las superficies da como resultado una transición gradual que cambia significativamente la topografía de la superficie, la capacidad de carga y la fricción.
Recientemente, Jedynak publicó las aproximaciones exactas de y [36] . Se dan mediante las siguientes fórmulas racionales, que son aproximaciones de las integrales . Se calculan para la distribución gaussiana de asperezas, que se ha demostrado que no son realistas para la superficie de ingeniería, pero se pueden suponer donde los resultados de fricción, capacidad de carga o área de contacto real no son críticos para el análisis. [38]
Porque los coeficientes son
El error relativo máximo es .
Porque los coeficientes son
El error relativo máximo es . El artículo [36] también contiene las expresiones exactas para
donde erfc(z) significa la función de error complementaria y es la función de Bessel modificada del segundo tipo.
Para la situación en la que las asperezas en las dos superficies tienen una distribución de altura gaussiana y se puede suponer que los picos son esféricos, [31] la presión de contacto promedio es suficiente para causar fluencia cuando donde es la tensión de fluencia uniaxial y es la dureza de indentación. [1] Greenwood y Williamson [31] definieron un parámetro adimensional llamado índice de plasticidad que podría usarse para determinar si el contacto sería elástico o plástico.
El modelo de Greenwood-Williamson requiere el conocimiento de dos cantidades estadísticamente dependientes: la desviación estándar de la rugosidad de la superficie y la curvatura de los picos de aspereza. Mikic ha dado una definición alternativa del índice de plasticidad. [32] La fluencia se produce cuando la presión es mayor que la tensión de fluencia uniaxial. Dado que la tensión de fluencia es proporcional a la dureza de indentación , Mikic definió el índice de plasticidad para el contacto elástico-plástico como
En esta definición se representa la microrrugosidad en un estado de plasticidad completa y solo se necesita una cantidad estadística, la pendiente rms, que se puede calcular a partir de mediciones de superficie. Para , la superficie se comporta elásticamente durante el contacto.
En los modelos de Greenwood-Williamson y Mikic se supone que la carga es proporcional al área deformada. Por lo tanto, el comportamiento plástico o elástico del sistema es independiente de la fuerza normal aplicada. [1]
Una visión general del modelo GT
El modelo propuesto por John A. Greenwood y John H. Tripp (GT), [40] extendió el modelo GW al contacto entre dos superficies rugosas. El modelo GT es ampliamente utilizado en el campo del análisis elastohidrodinámico.
Las ecuaciones citadas con mayor frecuencia dadas por el modelo GT son para el área de contacto de asperezas.
y carga transportada por asperezas
dónde:
, parámetro de rugosidad,
, área de contacto nominal,
, Parámetro de película de aceite de Stribeck, definido por primera vez por Stribeck \cite{gt} como ,
, módulo elástico efectivo,
, funciones estadísticas introducidas para que coincidan con la distribución gaussiana asumida de asperezas.
Matthew Leighton et al. [38] presentaron ajustes para superficies de camisas de cilindros de motores de combustión interna con trama cruzada junto con un proceso para determinar los términos para cualquier superficie medida. Leighton et al. [38] demostraron que los datos de ajuste gaussiano no son precisos para modelar ninguna superficie diseñada y continuaron demostrando [39] que el funcionamiento temprano de las superficies da como resultado una transición gradual que cambia significativamente la topografía de la superficie, la capacidad de carga y la fricción.
Las soluciones exactas para y son presentadas en primer lugar por Jedynak. [36] Se expresan de la siguiente manera. Se calculan para la distribución gaussiana de asperezas, que han demostrado ser poco realistas para superficies de ingeniería, pero se pueden asumir donde los resultados de fricción, capacidad de carga o área de contacto real no son críticos para el análisis. [38]
donde erfc(z) significa la función de error complementaria y es la función de Bessel modificada del segundo tipo.
En el artículo [36] se puede encontrar una revisión exhaustiva de los aproximantes existentes para . Las nuevas propuestas proporcionan los aproximantes más precisos para y , que se informan en la literatura. Se dan mediante las siguientes fórmulas racionales, que son aproximantes muy exactos para las integrales . Se calculan para la distribución gaussiana de asperezas
Porque los coeficientes son
El error relativo máximo es .
Porque los coeficientes son
El error relativo máximo es .
Contacto adhesivo entre cuerpos elásticos
Cuando dos superficies sólidas se acercan entre sí, experimentan fuerzas de atracción de van der Waals . El modelo de van der Waals de RS Bradley [41] proporciona un medio para calcular la fuerza de tracción entre dos esferas rígidas con superficies perfectamente lisas. El modelo hertziano de contacto no considera posible la adhesión. Sin embargo, a finales de la década de 1960, se observaron varias contradicciones cuando se comparó la teoría de Hertz con experimentos que involucraban el contacto entre esferas de caucho y vidrio.
Se observó [5] que, aunque la teoría de Hertz se aplicaba a cargas grandes, a cargas bajas
El área de contacto fue mayor que la predicha por la teoría de Hertz,
el área de contacto tenía un valor distinto de cero incluso cuando se eliminó la carga, y
Incluso se produjo una fuerte adhesión cuando las superficies de contacto estaban limpias y secas.
Esto indicaba que había fuerzas adhesivas en juego. El modelo Johnson-Kendall-Roberts (JKR) y los modelos Derjaguin-Muller-Toporov (DMT) fueron los primeros en incorporar la adhesión al contacto hertziano.
Modelo Bradley de contacto rígido
Se supone comúnmente que la fuerza superficial entre dos planos atómicos a cierta distancia uno del otro se puede derivar del potencial de Lennard-Jones . Con esta suposición
donde es la fuerza (positiva en compresión), es la energía superficial total de ambas superficies por unidad de área, y es la separación de equilibrio de los dos planos atómicos.
El modelo de Bradley aplicó el potencial de Lennard-Jones para hallar la fuerza de adhesión entre dos esferas rígidas. Se determinó que la fuerza total entre las esferas era
¿Dónde están los radios de las dos esferas?
Las dos esferas se separan completamente cuando se alcanza la fuerza de tracción , en cuyo punto
Modelo JKR de contacto elástico
Esquema del área de contacto para el modelo JKREnsayo JKR con cordón rígido sobre material plano deformable: ciclo completo
Para incorporar el efecto de la adhesión en el contacto hertziano, Johnson, Kendall y Roberts [5] formularon la teoría JKR de contacto adhesivo utilizando un equilibrio entre la energía elástica almacenada y la pérdida de energía superficial . El modelo JKR considera el efecto de la presión de contacto y la adhesión solo dentro del área de contacto. La solución general para la distribución de la presión en el área de contacto en el modelo JKR es
Obsérvese que en la teoría original de Hertz, el término que contiene se descuidó debido a que no se podía mantener la tensión en la zona de contacto. Para el contacto entre dos esferas
donde es el radio del área de contacto, es la fuerza aplicada, es la energía superficial total de ambas superficies por unidad de área de contacto, son los radios, los módulos de Young y las relaciones de Poisson de las dos esferas, y
La distancia de aproximación entre las dos esferas viene dada por
La ecuación de Hertz para el área de contacto entre dos esferas, modificada para tener en cuenta la energía superficial, tiene la forma
Cuando la energía superficial es cero, se recupera la ecuación de Hertz para el contacto entre dos esferas. Cuando la carga aplicada es cero, el radio de contacto es
Se predice que la carga de tracción en la que se separan las esferas (es decir, ) será
Esta fuerza también se denomina fuerza de tracción . Nótese que esta fuerza es independiente de los módulos de las dos esferas. Sin embargo, existe otra posible solución para el valor de con esta carga. Esta es el área de contacto crítica , dada por
Si definimos el trabajo de adhesión como
donde son las energías adhesivas de las dos superficies y es un término de interacción, podemos escribir el radio de contacto JKR como
La carga de tracción en la separación es
y el radio de contacto crítico está dado por
La profundidad crítica de penetración es
Modelo DMT de contacto elástico
El modelo Derjaguin–Muller–Toporov (DMT) [7] [42] es un modelo alternativo para el contacto adhesivo que supone que el perfil de contacto sigue siendo el mismo que en el contacto hertziano pero con interacciones atractivas adicionales fuera del área de contacto.
El radio de contacto entre dos esferas de la teoría DMT es
y la fuerza de tracción es
Cuando se alcanza la fuerza de tracción, el área de contacto se vuelve cero y no hay singularidad en las tensiones de contacto en el borde del área de contacto.
En cuanto al trabajo de adhesión
y
Parámetro Tabor
En 1977, Tabor [43] demostró que la aparente contradicción entre las teorías JKR y DMT podía resolverse al observar que las dos teorías eran los límites extremos de una única teoría parametrizada por el parámetro de Tabor ( ) definido como
donde es la separación de equilibrio entre las dos superficies en contacto. La teoría JKR se aplica a esferas grandes y flexibles para las que es grande. La teoría DMT se aplica a esferas pequeñas y rígidas con valores pequeños de .
Posteriormente, Derjaguin y sus colaboradores [44] , al aplicar la ley de fuerza superficial de Bradley a un semiespacio elástico, confirmaron que a medida que aumenta el parámetro Tabor, la fuerza de tracción disminuye desde el valor de Bradley hasta el valor de JKR . Greenwood [45] realizó cálculos más detallados posteriormente, revelando la curva de carga/aproximación en forma de S que explica el efecto de salto. Feng [46] proporcionó un método más eficiente para realizar los cálculos y resultados adicionales.
Modelo de contacto elástico de Maugis-Dugdale
Esquema del área de contacto para el modelo Maugis-Dugdale
Maugis [9] proporcionó una mejora adicional a la idea de Tabor al representar la fuerza superficial en términos de una aproximación de zona cohesiva de Dugdale, de modo que el trabajo de adhesión está dado por
donde es la fuerza máxima predicha por el potencial de Lennard-Jones y es la separación máxima obtenida al hacer coincidir las áreas bajo las curvas de Dugdale y Lennard-Jones (ver figura adyacente). Esto significa que la fuerza de atracción es constante para . No hay más penetración en la compresión. El contacto perfecto ocurre en un área de radio y las fuerzas adhesivas de magnitud se extienden a un área de radio . En la región , las dos superficies están separadas por una distancia con y . La relación se define como
.
En la teoría de Maugis-Dugdale, [47] la distribución de tracción superficial se divide en dos partes: una debido a la presión de contacto de Hertz y la otra a la tensión adhesiva de Dugdale. El contacto de Hertz se supone en la región . La contribución a la tracción superficial de la presión de Hertz se da por
donde la fuerza de contacto de Hertz está dada por
La penetración debida a la compresión elástica es
El desplazamiento vertical en es
y la separación entre las dos superficies es
La distribución de la tracción superficial debido a la tensión adhesiva de Dugdale es
La fuerza adhesiva total viene dada entonces por
La compresión debida a la adhesión de Dugdale es
y la brecha en es
La tracción neta sobre el área de contacto se expresa entonces en y la fuerza de contacto neta es . Cuando la tracción adhesiva cae a cero.
En esta etapa se introducen valores no dimensionalizados que se desafían como
Además, Maugis propuso un parámetro que es equivalente al parámetro Tabor . Este parámetro se define como
donde la tensión cohesiva escalonada es igual a la tensión teórica del potencial de Lennard-Jones
Zheng y Yu [48] sugirieron otro valor para la tensión cohesiva del paso .
para igualar el potencial de Lennard-Jones, lo que lleva a
Entonces la fuerza de contacto neta puede expresarse como
y la compresión elástica como
La ecuación para la brecha cohesiva entre los dos cuerpos toma la forma
Esta ecuación se puede resolver para obtener valores de para varios valores de y . Para valores grandes de , y se obtiene el modelo JKR. Para valores pequeños de se recupera el modelo DMT.
Modelo Carpick-Ogletree-Salmeron (COS)
El modelo de Maugis-Dugdale solo se puede resolver iterativamente si no se conoce a priori el valor de . La solución aproximada de Carpick-Ogletree-Salmeron (COS) [49] (según Robert Carpick , D. Frank Ogletree y Miquel Salmeron) simplifica el proceso utilizando la siguiente relación para determinar el radio de contacto :
donde es el área de contacto con carga cero, y es un parámetro de transición que está relacionado con
El caso corresponde exactamente a la teoría JKR mientras que corresponde a la teoría DMT. Para los casos intermedios, el modelo COS se corresponde estrechamente con la solución de Maugis-Dugdale para .
Influencia de la forma del contacto
Incluso en presencia de superficies perfectamente lisas, la geometría puede entrar en juego en forma de la forma macroscópica de la región de contacto. Cuando un punzón rígido con una cara plana pero de forma extraña se separa con cuidado de su contraparte blanda, su desprendimiento no se produce instantáneamente, sino que los frentes de desprendimiento comienzan en las esquinas puntiagudas y se desplazan hacia el interior, hasta que se alcanza la configuración final que, para las formas macroscópicamente isótropas, es casi circular. El parámetro principal que determina la fuerza adhesiva de los contactos planos resulta ser el tamaño lineal máximo del contacto. [50] El proceso de desprendimiento se puede ver en la película, como se observa experimentalmente. [51]
Véase también
Adhesivo : Material no metálico que se utiliza para unir diversos materiales.
Unión adhesiva : técnica de unión utilizada en la fabricación y reparación.
Tensión superficial : tendencia de la superficie de un líquido a encogerse para reducir el área superficial.
Tribología – Ciencia e ingeniería de superficies que interactúan en movimiento relativo
Contacto unilateral : Restricción mecánica que impide la penetración entre dos cuerpos.
Humectación : Capacidad de un líquido de mantener contacto con una superficie sólida.
Referencias
^ abcdef Johnson, KL (1985). Mecánica de contacto . Cambridge University Press. ISBN 978-0-521-25576-9.
^ Popov, VL (2010). Mecánica de contacto y fricción: principios físicos y aplicaciones . Springer Berlin Heidelberg. pág. 362. ISBN978-3-642-10803-7.
^ ab H. Hertz, 1881, Über die berührung fester elastischer Körper, Journal für die reine und angewandte Mathematik 92, págs.156-171. (Para la versión en inglés, consulte: Hertz, H., 1896. On the contact of elastic solids, en: Miscellaneous Papers, Chapter V, pp.146-162 . Por Hertz, H. y Lenard P., traducido por Jones, DE y Schott GA, Londres: Macmillan.
^ abc Hertz, HR, 1882, Über die Berührung fester elastischer Körper und Über die Härte, Verhandlungen des Vereins zur Beförderung des Gewerbefleisscs , Berlín: Verein zur Beförderung des Gewerbefleisses, págs. 449-463 (para la versión en inglés, consulte: Hertz, H ., 1896. Sobre el contacto de sólidos elásticos rígidos y sobre la dureza, en: Miscellaneous Papers, Capítulo VI, páginas 163-183 por Hertz, H. y Lenard P., traducido por Jones, DE y Schott GA, Londres: Macmillan.
^ abc Johnson, KL; Kendall, K.; Roberts, AD (8 de septiembre de 1971). "Energía superficial y contacto de sólidos elásticos". Actas de la Royal Society de Londres. A. Ciencias matemáticas y físicas . 324 (1558). La Royal Society: 301–313. Bibcode :1971RSPSA.324..301J. doi : 10.1098/rspa.1971.0141 . ISSN 0080-4630. S2CID 137730057.
^ ab Maugis, D. (3 de febrero de 2000). Contacto, adhesión y ruptura de sólidos elásticos . Springer Science & Business Media. ISBN3-540-66113-1.
^ abc Derjaguin, BV; Muller, VM; Toporov, Yu.P (1975). "Efecto de las deformaciones por contacto en la adhesión de partículas". Journal of Colloid and Interface Science . 53 (2). Elsevier BV: 314–326. Bibcode :1975JCIS...53..314D. doi :10.1016/0021-9797(75)90018-1. ISSN 0021-9797.
^ Tabor, D (1970-01-01). "La dureza de los sólidos". Reseñas de Física en Tecnología . 1 (3). IOP Publishing: 145–179. doi :10.1088/0034-6683/1/3/i01. ISSN 0034-6683.
^ ab Maugis, Daniel (1992). "Adhesión de esferas: la transición JKR-DMT utilizando un modelo de Dugdale". Journal of Colloid and Interface Science . 150 (1). Elsevier BV: 243–269. Bibcode :1992JCIS..150..243M. doi :10.1016/0021-9797(92)90285-t. ISSN 0021-9797.
^ "El área de contacto entre superficies estacionarias y móviles". Actas de la Royal Society de Londres. Serie A. Ciencias matemáticas y físicas . 169 (938). The Royal Society: 391–413. 1939-02-07. doi :10.1098/rspa.1939.0005. ISSN 0080-4630.
^ Bowden, FP; Tabor, D. (2001). La fricción y lubricación de los sólidos. Serie internacional de monografías sobre física. Vol. 1. Clarendon Press. ISBN978-0-19-850777-2.
^ Archard, JF (24 de diciembre de 1957). "Deformación elástica y leyes de la fricción". Actas de la Royal Society de Londres. Serie A. Ciencias matemáticas y físicas . 243 (1233). La Royal Society: 190–205. Bibcode :1957RSPSA.243..190A. doi :10.1098/rspa.1957.0214. ISSN 0080-4630. S2CID 138707812.
^ Greenwood, JA; Williamson, JBP (6 de diciembre de 1966). "Contacto de superficies nominalmente planas". Actas de la Royal Society de Londres. Serie A. Ciencias matemáticas y físicas . 295 (1442). La Royal Society: 300–319. Bibcode :1966RSPSA.295..300G. doi :10.1098/rspa.1966.0242. ISSN 0080-4630. S2CID 137430238.
^ Bush, AW; Gibson, RD; Thomas, TR (1975). "El contacto elástico de una superficie rugosa". Wear . 35 (1). Elsevier BV: 87–111. doi :10.1016/0043-1648(75)90145-3. ISSN 0043-1648.
^ Persson, BNJ; Bucher, F.; Chiaia, B. (29 de abril de 2002). "Contacto elástico entre superficies aleatoriamente rugosas: comparación de la teoría con resultados numéricos". Physical Review B . 65 (18). American Physical Society (APS): 184106. Bibcode :2002PhRvB..65r4106P. doi :10.1103/physrevb.65.184106. ISSN 0163-1829.
^ Popov, Valentín L.; Heß, Markus; Willert, Emanuel (2019). Manual de mecánica de contactos: soluciones exactas de problemas de contactos axisimétricos. Berlín Heidelberg: Springer-Verlag. ISBN9783662587089.
^ ab Sneddon, Ian N. (1965). "La relación entre la carga y la penetración en el problema de Boussinesq axisimétrico para un punzón de perfil arbitrario". Revista internacional de ciencias de la ingeniería . 3 (1). Elsevier BV: 47–57. doi :10.1016/0020-7225(65)90019-4. ISSN 0020-7225.
^ Popov, Valentin L. (10 de marzo de 2010). Mecánica de contacto y fricción . Springer Science & Business Media. ISBN978-3-642-10803-7.
^ Popov, Valentin L. (2013). "Método de reducción de la dimensionalidad en mecánica de contacto y fricción: un vínculo entre escalas micro y macro". Fricción . 1 (1). Springer Science and Business Media LLC: 41–62. doi : 10.1007/s40544-013-0005-3 . ISSN 2223-7690. S2CID 256405038.
^ Popov, Valentín L.; Heß, Markus (1 de octubre de 2013). Methode der Dimensionsreduktion en Kontaktmechanik und Reibung (en alemán). Springer-Verlag. ISBN978-3-642-32673-8.
^ Popova, Elena; Popov, Valentín L. (2020). "Ludwig Föppl y Gerhard Schubert: clásicos desconocidos de la mecánica de contacto". ZAMM - Revista de Mecánica y Matemáticas Aplicadas / Zeitschrift für Angewandte Mathematik und Mechanik . 100 (9): e202000203. Código Bib : 2020ZaMM..100E0203P. doi : 10.1002/zamm.202000203 .
^ Shigley, Joseph Edward; Mischke, Charles R. (1989). "Cap. 2". Diseño de ingeniería mecánica (5.ª ed.). McGraw-Hill Science, Engineering & Mathematics. ISBN0-07-056899-5.
^ Kalker, JJ (1990). Cuerpos elásticos tridimensionales en contacto rodante. Mecánica de sólidos y sus aplicaciones. Springer Netherlands. ISBN978-0-7923-0712-9.
^ Wriggers, P. (2006). Mecánica de contacto computacional (2.ª ed.). Springer Berlin Heidelberg. ISBN978-3-540-32609-0.
^ Laursen, TA (2003). Mecánica computacional de contacto e impacto: fundamentos del modelado de fenómenos interfaciales en análisis de elementos finitos no lineales. Biblioteca de ingeniería en línea. Springer Berlin Heidelberg. ISBN978-3-540-42906-7.
^ Acary, V.; Brogliato, B. (2008). Métodos numéricos para sistemas dinámicos no uniformes: aplicaciones en mecánica y electrónica. Apuntes de clase sobre mecánica aplicada y computacional. Springer Berlin Heidelberg. ISBN978-3-540-75392-6.
^ Popov, Valentín L. (2009). Kontaktmechanik und Reibung (en alemán). Medios de ciencia y negocios de Springer. ISBN978-3-540-88836-9.
^ Cottle, R.; Pang, J.; Stone, R. (1 de enero de 2009). El problema de complementariedad lineal . Clásicos en matemáticas aplicadas. Sociedad de matemáticas industriales y aplicadas. doi :10.1137/1.9780898719000. ISBN9780898716863.
^ ab Hanaor, D.; Gan, Y.; Einav, I. (2016). "Fricción estática en interfaces fractales". Tribology International . 93 : 229–238. arXiv : 2106.01473 . doi :10.1016/j.triboint.2015.09.016. S2CID 51900923.
^ Zhai, Chongpu; Hanaor, Dorian; Gan, Yixiang (2017). "Rigidez de contacto de superficies multiescala mediante análisis de truncamiento". Revista Internacional de Ciencias Mecánicas . 131–132. Elsevier BV: 305–316. doi :10.1016/j.ijmecsci.2017.07.018. ISSN 0020-7403.
^ abcde Greenwood, JA; Williamson, JBP (6 de diciembre de 1966). "Contacto de superficies nominalmente planas". Actas de la Royal Society de Londres. Serie A. Ciencias matemáticas y físicas . 295 (1442). La Royal Society: 300–319. Bibcode :1966RSPSA.295..300G. doi :10.1098/rspa.1966.0242. ISSN 0080-4630. S2CID 137430238.
^ ab Mikić, BB (1974). "Conductancia de contacto térmico; consideraciones teóricas". Revista internacional de transferencia de calor y masa . 17 (2). Elsevier BV: 205–214. doi :10.1016/0017-9310(74)90082-9. ISSN 0017-9310.
^ Hyun, Sangil; Robbins, Mark O. (2007). "Contacto elástico entre superficies rugosas: Efecto de la rugosidad en longitudes de onda grandes y pequeñas". Tribology International . 40 (10–12). Elsevier BV: 1413–1422. doi :10.1016/j.triboint.2007.02.003. ISSN 0301-679X.
^ Leighton; et al. (2016). "Factores de flujo específicos de la superficie para la predicción de la fricción de superficies con tramas cruzadas" (PDF) . Topografía de superficies: metrología y propiedades . 4 (2): 025002. Bibcode :2016SuTMP...4b5002L. doi : 10.1088/2051-672x/4/2/025002 . S2CID 111631084.
^ Arcoumanis, C.; Ostovar, P.; Mortier, R. (1997-10-01). "Modelado de lubricación mixta de líquidos newtonianos y pseudoplásticos en una configuración de anillo de pistón". Serie de artículos técnicos de la SAE . Vol. 1. Warrendale, PA. doi :10.4271/972924.
^ abcde Jedynak, Radosław (2019). "Soluciones exactas y aproximadas de las integrales infinitas de la distribución de altura de aspereza para los modelos de contacto de aspereza de Greenwood-Williamson y Greenwood-Tripp". Tribology International . 130 . Elsevier BV: 206–215. doi :10.1016/j.triboint.2018.09.009. ISSN 0301-679X. S2CID 139894096.
^ Peklenik, J. (septiembre de 1967). "Artículo 24: Nuevos desarrollos en caracterización y medición de superficies por medio de análisis de procesos aleatorios" . Actas de la Institución de Ingenieros Mecánicos, Actas de congresos . 182 (11): 108–126. doi :10.1243/pime_conf_1967_182_309_02. ISSN 0367-8849.
^ abcdef Leighton, M.; Morris, N.; Rahmani, R.; Rahnejat, H. (1 de enero de 2017). "Modelo de aspereza específica de la superficie para la predicción de la fricción en regímenes de lubricación límite y mixtos" (PDF) . Meccanica . 52 (1): 21–33. doi :10.1007/s11012-016-0397-z. ISSN 1572-9648. S2CID 54710212.
^ ab Leighton, M; Morris, N; Gore, M; Rahmani, R; Rahnejat, H; King, PD (5 de agosto de 2016). "Interacciones de contorno de superficies rugosas no gaussianas" (PDF) . Actas de la Institución de Ingenieros Mecánicos, Parte J: Revista de Tribología de Ingeniería . 230 (11): 1359–1370. doi : 10.1177/1350650116656967 . ISSN 1350-6501. S2CID 53347629.
^ Greenwood, JA; Tripp, JH (1970). "El contacto de dos superficies rugosas nominalmente planas". Actas de la Institución de Ingenieros Mecánicos . 185 (1). Publicaciones SAGE: 625–633. doi :10.1243/pime_proc_1970_185_069_02. ISSN 0020-3483.
^ Bradley, RS (1932). "LXXIX. La fuerza de cohesión entre superficies sólidas y la energía superficial de los sólidos ". Revista filosófica y revista científica de Londres, Edimburgo y Dublín . 13 (86). Informa UK Limited: 853–862. doi :10.1080/14786449209461990. ISSN 1941-5982.
^ Muller, VM; Derjaguin, BV; Toporov, Yu.P. (1983). "Sobre dos métodos de cálculo de la fuerza de adherencia de una esfera elástica a un plano rígido". Coloides y superficies . 7 (3). Elsevier BV: 251–259. doi :10.1016/0166-6622(83)80051-1. ISSN 0166-6622.
^ TABOR, D. (1977). "Fuerzas superficiales e interacciones superficiales". Conferencias plenarias e invitadas . Elsevier. págs. 3–14. doi :10.1016/b978-0-12-404501-9.50009-2. ISBN9780124045019.
^ Muller, VM; Yushchenko, VS; Derjaguin, BV (1980). "Sobre la influencia de las fuerzas moleculares en la deformación de una esfera elástica y su adherencia a un plano rígido". Journal of Colloid and Interface Science . 77 (1). Elsevier BV: 91–101. Bibcode :1980JCIS...77...91M. doi :10.1016/0021-9797(80)90419-1. ISSN 0021-9797.
^ Greenwood, JA (8 de junio de 1997). "Adhesión de esferas elásticas". Actas de la Royal Society de Londres. Serie A: Ciencias matemáticas, físicas y de ingeniería . 453 (1961). La Royal Society: 1277–1297. Bibcode :1997RSPSA.453.1277G. doi :10.1098/rspa.1997.0070. ISSN 1364-5021. S2CID 124217562.
^ Feng, James Q. (2000). "Comportamiento de contacto de partículas elásticas esféricas: un estudio computacional de la adhesión y deformaciones de partículas". Coloides y superficies A: aspectos fisicoquímicos y de ingeniería . 172 (1–3). Elsevier BV: 175–198. doi :10.1016/s0927-7757(00)00580-x. ISSN 0927-7757.
^ Johnson, KL; Greenwood, JA (1997). "Un mapa de adhesión para el contacto de esferas elásticas". Journal of Colloid and Interface Science . 192 (2). Elsevier BV: 326–333. Bibcode :1997JCIS..192..326J. doi :10.1006/jcis.1997.4984. ISSN 0021-9797. PMID 9367554.
^ Zheng, Zhijun; Yu, Jilin (2007). "Uso de la aproximación de Dugdale para hacer coincidir una interacción específica en el contacto adhesivo de objetos elásticos". Journal of Colloid and Interface Science . 310 (1). Elsevier BV: 27–34. Bibcode :2007JCIS..310...27Z. doi :10.1016/j.jcis.2007.01.042. ISSN 0021-9797. PMID 17335843.
^ Carpick, Robert W.; Ogletree, D. Frank; Salmeron, Miquel (1999). "Una ecuación general para ajustar el área de contacto y las mediciones de fricción frente a carga". Revista de ciencia coloidal e interfacial . 211 (2). Elsevier BV: 395–400. Código Bibliográfico :1999JCIS..211..395C. doi :10.1006/jcis.1998.6027. ISSN 0021-9797. PMID 10049556.
^ Popov, Valentin L.; Pohrt, Roman; Li, Qiang (1 de septiembre de 2017). "Resistencia de los contactos adhesivos: influencia de la geometría de contacto y los gradientes del material". Fricción . 5 (3): 308–325. doi : 10.1007/s40544-017-0177-3 . ISSN 2223-7690.
^ Física de la fricción (6 de diciembre de 2017). Ciencia de la fricción: Adhesión de formas complejas. Archivado desde el original el 15 de diciembre de 2021. Consultado el 2 de enero de 2018 a través de YouTube.
Enlaces externos
[1]: Una rutina MATLAB para resolver el problema de mecánica de contacto elástico lineal titulada "Una solución LCP del problema de mecánica de contacto elástico lineal" se proporciona en el intercambio de archivos en MATLAB Central.
[2]: Calculadora de mecánica de contactos.
[3]: cálculos detallados y fórmulas de la teoría JKR para dos esferas.
[5]: Un código Matlab para el análisis de contacto de Hertz (incluye casos de línea, punto y elíptico).
[6]: Modelos de adhesión JKR, MD y DMT (rutinas de Matlab).






















































![{\displaystyle M_{x}=\int _{S}y~q_{z}(x,y)~\mathrm {d} A~;~~M_{y}=\int _{S}-x~ q_{z}(x,y)~\mathrm {d} A~;~~M_{z}=\int _{S}[x~q_{y}(x,y)-y~q_{x} (x,y)]~\mathrm {d} A}](https://wikimedia.org/api/rest_v1/media/math/render/svg/84858a589cb089aa631e81fb379d152b42ab368b)







![{\displaystyle {\begin{aligned}\sigma _{xx}&=-{\frac {2z}{\pi }}\int _{a}^{b}{\frac {p\left(x'\right)\left(xx'\right)^{2}\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}~;~~\sigma _{zz}=-{\frac {2z^{3}}{\pi }}\int _{a}^{b}{\frac {p\left(x'\right)\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\\[3pt]\sigma _{xz}&=-{\frac {2z^{2}}{\pi }}\int _{a}^{b}{\frac {p\left(x'\right)\left(xx'\right)\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/748f49fbb04908de77b05ca997ec1baefdc73491)


![{\displaystyle {\begin{aligned}\sigma _{xx}&=-{\frac {2}{\pi }}\int _{a}^{b}{\frac {q\left(x'\right)\left(xx'\right)^{3}\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}~;~~\sigma _{zz}=-{\frac {2z^{2}}{\pi }}\int _{a}^{b}{\frac {q\left(x'\right)\left(xx'\right)\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\\[3pt]\sigma _{xz}&=-{\frac {2z}{\pi }}\int _{a}^{b}{\frac {q\left(x'\right)\left(xx'\right)^{2}\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c3d99b5917ad56c9a691709199164f1bd9018c3f)












































![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0,398942280401,0,159773702775,0,0389687688311,0,00364356495452]\\[][b_{1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=\left[1,653807476138,1,170419428529,0,448892964428,0,0951971709160,0,00931642803836,-6,383774657279\times 10^{-6}\derecha]\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/91be480fb30f0f102dd6f2af32e97c2f0ba7a8a7)


![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0,430019993662,0,101979509447,0,0229040629580,0,000688602924]\\[][b_{1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=[1,671117125984,1,199586555505,0,46936532151,0,102632881122,0,010686348714,0,0000517200271]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3b60e034e36c4936d8cb548ca96d555a463be8ce)






















![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0,5,0,182536384941,0,039812283118,0,003684879001]\\[][b_{1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=[1,960841785003,1,708677456715,0,856592986083,0,264996791567,0,049257843893,0,004640740133]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f29ff10822d1d70c853baeacd29de26639ec0413)


![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0,616634218997,0,108855827811,0,023453835635,0,000449332509]\\[][b_{1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=[1,919948267476,1,635304362591,0,799392556572,0,240278859212,0,043178653945,0,003863334276]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ba5350391adf41af8360811b035ddd8bfd6670a)

![{\displaystyle F(z)={\cfrac {16\gamma }{3z_{0}}}[\left({\cfrac {z}{z_{0}}})^{-9}-\left({\cfrac {z}{z_{0}}})^{-3}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6cc0d0f528d67748519b18d1879f1294c69ad04f)


![{\displaystyle F_{a}(z)={\cfrac {16\gamma \pi R}{3}}[{\cfrac {1}{4}}({\cfrac {z}{z_{0}}})^{-8}-\left({\cfrac {z}{z_{0}}})^{-2}]~;~~{\frac {1}{R}}={\frac {1}{R_{1}}}+{\frac {1}{R_{2}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8ed6e557a37cc80e1cabcee94c45c1ed372b1afd)






























![{\displaystyle \mu :={\frac {d_{c}}{z_{0}}}\approx \left[{\frac {R(\Delta \gamma )^{2}}{{E^{*}}^{2}z_{0}^{3}}}\right]^{\frac {1}{3}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cee629f48f3b4619f743181ab1f51a37a65b6663)

















![{\displaystyle u^{H}(c)={\cfrac {1}{\pi R}}[a^{2}(2-m^{2})\sin ^{-1}({\frac {1}{m}})+a^{2}{\sqrt {m^{2}-1}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2fc8fcd224f3cc8f0b4c13688f18599f477857de)

![{\displaystyle p^{D}(r)={\begin{cases}-{\frac {\sigma _{0}}{\pi }}\cos ^{-1}\left[{\frac {2-m^{2}-{\frac {r^{2}}{a^{2}}}}{m^{2}\left(1-{\frac {r^{2}}{m^{2}a^{2}}}\right)}}\right]&\quad {\text{para}}\quad r\leq a\\-\sigma _{0}&\quad {\text{para}}\quad a\leq r\leq c\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd9f07dae34286f3e0a287add88884474ed78b83)
![{\displaystyle F^{D}=-2\sigma _{0}m^{2}a^{2}[\cos ^{-1}({\frac {1}{m}}\right)+{\frac {1}{m^{2}}}{\sqrt {m^{2}-1}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/627849d1b6250dce2090a9098d8227ad0f8e4d10)

![{\displaystyle h^{D}(c)=({\frac {4\sigma _{0}a}{\pi E^{*}}}\right)[{\sqrt {m^{2}-1}}\cos ^{-1}\left({\frac {1}{m}}\right)+1-m\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0313721de708f08ab70365bbafeba470b275a5f5)









![{\displaystyle {\bar {F}}={\bar {a}}^{3}-\lambda {\bar {a}}^{2}\left[{\sqrt {m^{2}-1}}+m^{2}\sec ^{-1}m\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8e81925aa29d61950849b8ff97628db1fe9e869e)

![{\displaystyle {\frac {\lambda {\bar {a}}^{2}}{2}}[\left(m^{2}-2\right)\sec ^{-1}m+{\sqrt {m^{2}-1}}]+{\frac {4\lambda {\bar {a}}}{3}}[{\sqrt {m^{2}-1}}\sec ^{-1}m-m+1\right]=1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5628cdc5b5275a8e83a3589da8db3b2fdc10869d)









