La teoría lunar intenta explicar los movimientos de la Luna . Existen muchas pequeñas variaciones (o perturbaciones ) en el movimiento de la Luna y se han hecho muchos intentos para explicarlas. Después de siglos de ser problemático, el movimiento lunar ahora se puede modelar con un alto grado de precisión (ver la sección Desarrollos modernos).
La teoría lunar incluye:
La teoría lunar tiene una historia de más de 2000 años de investigación. Sus desarrollos más modernos se han utilizado durante los últimos tres siglos con fines científicos y tecnológicos fundamentales, y todavía se siguen utilizando con ese fin.
Las aplicaciones de la teoría lunar incluyen las siguientes:
La Luna ha sido observada durante milenios. A lo largo de estos siglos, se han podido alcanzar distintos niveles de atención y precisión, según las técnicas de observación disponibles en cada momento. La historia de las teorías lunares es igualmente larga: se extiende desde los tiempos de los astrónomos babilónicos y griegos hasta los modernos sistemas de medición de distancias por láser.
Entre los astrónomos y matemáticos notables a lo largo de los siglos, cuyos nombres están asociados con las teorías lunares, se encuentran:
Otros matemáticos y astrónomos matemáticos notables también hicieron contribuciones significativas.
La historia puede dividirse en tres partes: desde la antigüedad hasta Newton; el período de la física clásica (newtoniana); y los desarrollos modernos.
De la astronomía babilónica , los historiadores de la ciencia prácticamente no sabían nada antes de 1880. [3] Los escritos antiguos supervivientes de Plinio habían hecho escasa mención de tres escuelas astronómicas en Mesopotamia : en Babilonia, Uruk y 'Hipparenum' (posiblemente 'Sippar'). [4] Pero el conocimiento moderno definitivo de cualquier detalle solo comenzó cuando Joseph Epping descifró textos cuneiformes en tablillas de arcilla de un archivo babilónico: en estos textos identificó una efemérides de posiciones de la Luna. [5] Desde entonces, el conocimiento del tema, todavía fragmentario, ha tenido que construirse mediante un análisis minucioso de textos descifrados, principalmente en forma numérica, en tablillas de Babilonia y Uruk (todavía no se ha encontrado ningún rastro de nada de la tercera escuela mencionada por Plinio).
Al astrónomo babilónico Kidinnu (en griego o latín, Kidenas o Cidenas) se le ha atribuido la invención (siglo V o IV a.C.) de lo que hoy se llama «Sistema B» para predecir la posición de la Luna, teniendo en cuenta que la Luna cambia continuamente su velocidad a lo largo de su trayectoria en relación con el fondo de estrellas fijas. Este sistema implicaba calcular diariamente los cambios escalonados de la velocidad lunar, hacia arriba o hacia abajo, con un mínimo y un máximo aproximadamente cada mes. [6] La base de estos sistemas parece haber sido aritmética más que geométrica, pero sí tenían en cuenta aproximadamente la principal desigualdad lunar conocida hoy como ecuación del centro .
Los babilonios mantuvieron registros muy precisos de lunas nuevas y eclipses durante cientos de años. [7] En algún momento entre los años 500 a. C. y 400 a. C. identificaron y comenzaron a utilizar la relación cíclica de 19 años entre los meses lunares y los años solares, ahora conocida como el ciclo metónico . [8]
Esto les ayudó a construir una teoría numérica de las principales irregularidades en el movimiento de la Luna, alcanzando estimaciones notablemente buenas para los (diferentes) períodos de las tres características más prominentes del movimiento de la Luna:
La estimación babilónica del mes sinódico fue adoptada durante la mayor parte de dos milenios por Hiparco, Ptolomeo y los escritores medievales (y todavía se utiliza como parte de la base para el calendario hebreo (judío) calculado ).
A partir de entonces, desde Hiparco y Ptolomeo en las épocas bitiniana y ptolemaica hasta la época de la obra de Newton en el siglo XVII, las teorías lunares se elaboraron principalmente con la ayuda de ideas geométricas, inspiradas más o menos directamente por largas series de observaciones posicionales de la luna. En estas teorías lunares geométricas predominaban las combinaciones de movimientos circulares, aplicaciones de la teoría de los epiciclos . [14]
Hiparco , cuyas obras están en su mayoría perdidas y se conocen principalmente por citas de otros autores, supuso que la Luna se movía en un círculo inclinado 5° respecto a la eclíptica , rotando en dirección retrógrada (es decir, opuesta a la dirección de los movimientos aparentes anuales y mensuales del Sol y la Luna en relación con las estrellas fijas) una vez cada 18 2 ⁄ 3 años. El círculo actuaba como un deferente , llevando un epiciclo a lo largo del cual se suponía que la Luna se movía en dirección retrógrada. El centro del epiciclo se movía a una velocidad correspondiente al cambio medio en la longitud de la Luna, mientras que el período de la Luna alrededor del epiciclo era un mes anómalo. Este epiciclo proporcionó aproximadamente lo que más tarde se reconoció como la desigualdad elíptica, la ecuación del centro , y su tamaño se aproximaba a una ecuación del centro de aproximadamente 5° 1'. Esta cifra es mucho menor que el valor actual, pero se acerca a la diferencia entre los coeficientes actuales de la ecuación del centro (primer término) y el de la evacción: la diferencia se explica por el hecho de que las mediciones antiguas se tomaron en épocas de eclipses, y el efecto de la evacción (que en esas condiciones resta de la ecuación del centro) era en ese momento desconocido y pasado por alto. Para más información, véase también el artículo independiente Evacción .
La obra de Ptolomeo, Almagesto, tuvo una amplia y duradera aceptación e influencia durante más de un milenio. Ptolomeo presentó una teoría geométrica lunar que mejoraba la de Hiparco al proporcionar una segunda desigualdad del movimiento de la Luna, utilizando un mecanismo que hacía oscilar un poco el apogeo aparente: la prosneusis del epiciclo. Esta segunda desigualdad o segunda anomalía explicaba de manera bastante aproximada, no solo la ecuación del centro, sino también lo que se conocería (mucho más tarde) como la evocación. Pero esta teoría, aplicada a su conclusión lógica, haría que la distancia (y el diámetro aparente) de la Luna pareciera variar en un factor de aproximadamente 2, lo que claramente no se ve en la realidad. [15] (El diámetro angular aparente de la Luna varía mensualmente, pero sólo en un rango mucho más estrecho de aproximadamente 0,49°–0,55°. [16] ) Este defecto de la teoría ptolemaica llevó a propuestas de reemplazo por parte de Ibn al-Shatir en el siglo XIV [17] y por Copérnico en el siglo XVI. [18]
El astrónomo árabe Ibn al-Shatir (1304-1375) realizó importantes avances en la teoría lunar . Basándose en la observación de que la distancia a la Luna no cambiaba tan drásticamente como exigía el modelo lunar de Ptolomeo, elaboró un nuevo modelo lunar que sustituyó el mecanismo de manivela de Ptolomeo por un modelo de doble epiciclo que reducía el rango calculado de distancias entre la Luna y la Tierra. [17] [19] Una teoría lunar similar, desarrollada unos 150 años después por el astrónomo renacentista Nicolás Copérnico , tenía la misma ventaja en lo que respecta a las distancias lunares. [20] [21]
Tycho Brahe y Johannes Kepler perfeccionaron la teoría lunar ptolemaica, pero no superaron su defecto central: no proporcionaba una explicación adecuada de las variaciones (principalmente mensuales) de la distancia de la Luna, su diámetro aparente y su paralaje . Su trabajo añadió a la teoría lunar otros tres descubrimientos importantes.
Los refinamientos de Brahe y Kepler fueron reconocidos por sus sucesores inmediatos como mejoras, pero sus sucesores del siglo XVII probaron numerosas configuraciones geométricas alternativas para los movimientos lunares para mejorar aún más las cosas. Un éxito notable fue logrado por Jeremiah Horrocks , quien propuso un esquema que implicaba una libración mensual aproximada de 6 meses en la posición del apogeo lunar y también en el tamaño de la excentricidad elíptica. Este esquema tenía el gran mérito de dar una descripción más realista de los cambios en la distancia, el diámetro y la paralaje de la Luna.
El primer período gravitacional de la teoría lunar se inició con el trabajo de Newton . Fue el primero en definir el problema del movimiento perturbado de la Luna en términos reconocibles y modernos. Su trabajo pionero se refleja, por ejemplo, en los Principia [22] en todas las versiones, incluida la primera edición publicada en 1687.
El biógrafo de Newton, David Brewster , informó que la complejidad de la teoría lunar afectó la salud de Newton: "[E]l estuvo privado de su apetito y sueño" durante su trabajo sobre el problema en 1692-3, y le dijo al astrónomo John Machin que "su cabeza nunca le dolía excepto cuando estaba estudiando el tema". Según Brewster, Edmund Halley también le dijo a John Conduitt que cuando se le presionaba para que completara su análisis, Newton "siempre respondía que le hacía doler la cabeza y lo mantenía despierto tan a menudo, que no pensaba más en ello " [Énfasis en el original]. [23]
Newton identificó cómo evaluar el efecto perturbador sobre el movimiento relativo de la Tierra y la Luna, que surge de su gravedad hacia el Sol, en el Libro 1, Proposición 66, [24] y en el Libro 3, Proposición 25. [25] El punto de partida para este enfoque es el Corolario VI de las leyes del movimiento. [26] Esto muestra que si las fuerzas de aceleración externas de algún cuerpo masivo actúan de manera igual y en paralelo sobre algunos otros cuerpos diferentes considerados, entonces esos cuerpos se verían afectados de manera igual, y en ese caso sus movimientos (relativos entre sí) continuarían como si no hubiera tales fuerzas de aceleración externas en absoluto. Es solo en el caso de que las fuerzas externas (por ejemplo, en el Libro 1, Proposición 66, y el Libro 3, Proposición 25, las atracciones gravitacionales hacia el Sol) sean diferentes en tamaño o en dirección en sus efectos de aceleración sobre los diferentes cuerpos considerados (por ejemplo, sobre la Tierra y la Luna), que los efectos consecuentes son apreciables sobre los movimientos relativos de estos últimos cuerpos. (Newton se refirió a fuerzas acelerativas o gravedad acelerativa debidas a algún atractor masivo externo como el Sol. La medida que utilizó fue la aceleración que la fuerza tiende a producir (en términos modernos, fuerza por unidad de masa), en lugar de lo que ahora llamaríamos la fuerza en sí).
Así, Newton concluyó que es sólo la diferencia entre la atracción acelerada del Sol sobre la Luna y la atracción del Sol sobre la Tierra lo que perturba el movimiento de la Luna con respecto a la Tierra.
Newton utilizó entonces, en efecto , la descomposición vectorial de fuerzas [27] para llevar a cabo este análisis. En el Libro 1, Proposición 66 y en el Libro 3, Proposición 25 [28], demostró mediante una construcción geométrica, a partir de la atracción gravitatoria total del Sol sobre la Tierra y del Sol sobre la Luna, la diferencia que representa el efecto perturbador sobre el movimiento de la Luna en relación con la Tierra. En resumen, la línea LS en el diagrama de Newton, como se muestra a continuación, representa el tamaño y la dirección de la aceleración perturbadora que actúa sobre la Luna en la posición actual de la Luna P (la línea LS no pasa por el punto P, pero el texto muestra que esto no pretende ser significativo, es un resultado de los factores de escala y la forma en que se ha construido el diagrama).

En la imagen se muestra el diagrama de Newton de la primera edición latina (1687) de los Principia (Libro 3, Proposición 25, pág. 434). En él, Newton introdujo su análisis de las aceleraciones perturbadoras en la Luna en el sistema Sol-Tierra-Luna. Q representa al Sol, S a la Tierra y P a la Luna.
Algunas partes de este diagrama representan distancias y otras, aceleraciones gravitacionales (fuerzas de atracción por unidad de masa). En un doble sentido, SQ representa la distancia Tierra-Sol y, a su vez, también representa el tamaño y la dirección de la aceleración gravitacional Tierra-Sol. Las demás distancias del diagrama son proporcionales a la distancia SQ. Las demás atracciones son proporcionales a la atracción SQ.
Las atracciones del Sol son SQ (en la Tierra) y LQ (en la Luna). El tamaño de LQ se dibuja de modo que la relación de atracciones LQ:SQ sea el cuadrado inverso de la relación de distancias PQ:SQ. (Newton construye KQ=SQ, lo que proporciona una visión más sencilla de las proporciones). La atracción de la Tierra sobre la Luna actúa a lo largo de la dirección PS. (Pero la línea PS solo significa distancia y dirección hasta ahora, no se ha definido nada sobre el factor de escala entre las atracciones solar y terrestre).
Después de mostrar las atracciones solares LQ en la Luna y SQ en la Tierra, en la misma escala, Newton realiza una descomposición vectorial de LQ en sus componentes LM y MQ. Luego identifica la aceleración perturbadora en la Luna como la diferencia de esta con SQ. SQ y MQ son paralelas entre sí, por lo que SQ se puede restar directamente de MQ, dejando MS. La diferencia resultante, después de restar SQ de LQ, es por lo tanto la suma vectorial de LM y MS: estas se suman para dar una aceleración perturbadora LS.
Más tarde, Newton identificó otra resolución de la aceleración perturbadora LM+MS = LS, en componentes ortogonales: un componente transversal paralelo a LE, y un componente radial, efectivamente ES.

Desde su época, el esquema diagramático de Newton ha sido representado de otras maneras, quizás visualmente más claras. Aquí se muestra una presentación vectorial [29] que indica, para dos posiciones diferentes, P1 y P2, de la Luna en su órbita alrededor de la Tierra, los vectores respectivos LS1 y LS2 para la aceleración perturbadora debida al Sol. La posición de la Luna en P1 es bastante cercana a la que era en P en el diagrama de Newton; la perturbación correspondiente LS1 es como la LS de Newton en tamaño y dirección. En otra posición P2, la Luna está más lejos del Sol que la Tierra, la atracción del Sol LQ2 sobre la Luna es más débil que la atracción del Sol SQ=SQ2 sobre la Tierra, y entonces la perturbación resultante LS2 apunta oblicuamente lejos del Sol.
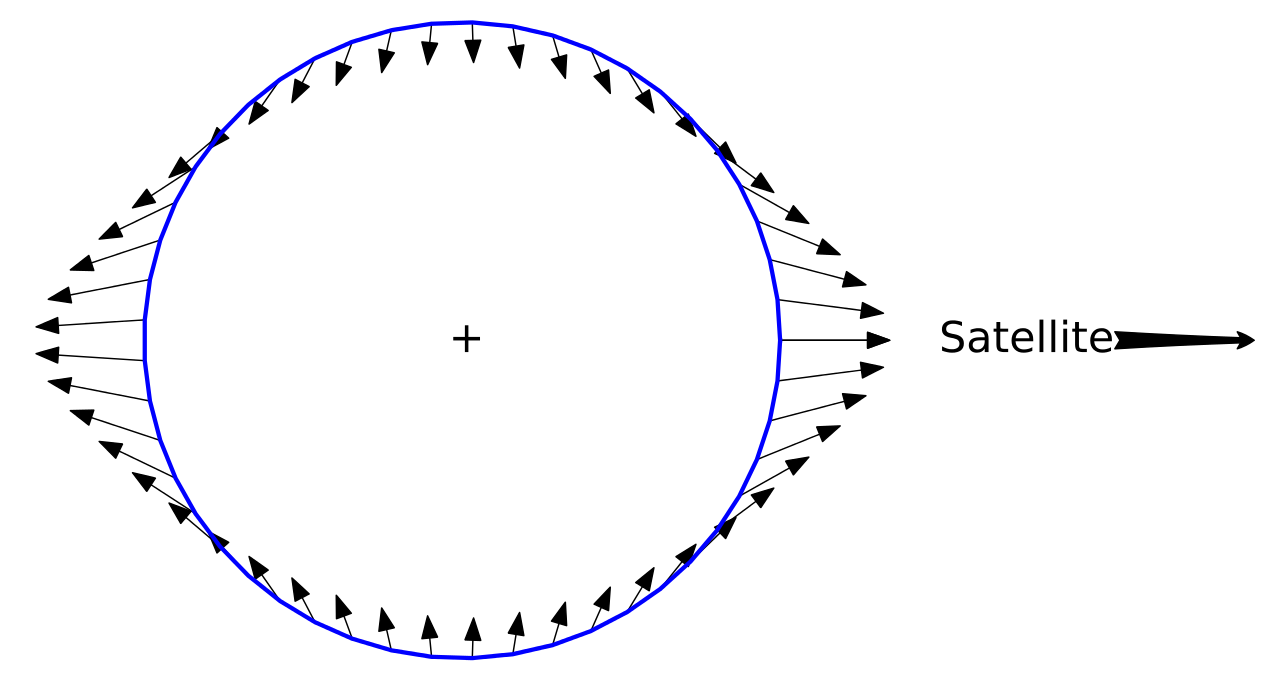
Construcciones como las del diagrama de Newton pueden repetirse para muchas posiciones diferentes de la Luna en su órbita. Para cada posición, el resultado es un vector de perturbación como LS1 o LS2 en el segundo diagrama. Aquí se muestra una forma del diagrama que se presenta a menudo y que resume los tamaños y direcciones de los vectores de perturbación para muchas posiciones diferentes de la Luna en su órbita. Cada flecha pequeña es un vector de perturbación como LS, aplicable a la Luna en la posición particular alrededor de la órbita desde la que comienza la flecha. Las perturbaciones en la Luna cuando está casi en línea a lo largo del eje Tierra-Sol, es decir, cerca de la luna nueva o llena, apuntan hacia afuera, lejos de la Tierra. Cuando la línea Luna-Tierra está a 90° del eje Tierra-Sol, apuntan hacia adentro, hacia la Tierra, con un tamaño que es solo la mitad del tamaño máximo de las perturbaciones axiales (hacia afuera). (Newton dio una estimación cuantitativa bastante buena del tamaño de la fuerza perturbadora solar: en cuadratura , donde se suma a la atracción de la Tierra, la puso en 1 ⁄ 178,725 de la atracción terrestre media, y el doble en las lunas nuevas y llenas, donde se opone y disminuye la atracción de la Tierra.) [28]
Newton también demostró que el mismo patrón de perturbación se aplica, no sólo a la Luna, en su relación con la Tierra perturbada por el Sol, sino también a otras partículas de manera más general en su relación con la Tierra sólida perturbada por el Sol (o por la Luna); por ejemplo, diferentes porciones de las aguas de marea en la superficie de la Tierra. [a] El estudio del patrón común de estas aceleraciones perturbadoras surgió del estudio inicial de Newton de las perturbaciones de la Luna, que también aplicó a las fuerzas que mueven las aguas de marea. Hoy en día, este patrón común en sí mismo se conoce a menudo como fuerza de marea, ya sea que se aplique a las perturbaciones de los movimientos de la Luna o de las aguas de marea de la Tierra, o de los movimientos de cualquier otro objeto que sufra perturbaciones de patrón análogo.
Después de presentar su diagrama "para hallar la fuerza del Sol para perturbar a la Luna" en el Libro 3, Proposición 25, Newton desarrolló una primera aproximación a la fuerza perturbadora solar, mostrando con más detalle cómo varían sus componentes a medida que la Luna sigue su trayectoria mensual alrededor de la Tierra. También dio los primeros pasos en la investigación de cómo la fuerza perturbadora muestra sus efectos al producir irregularidades en los movimientos lunares. [b]
Para unas cuantas desigualdades lunares seleccionadas, Newton mostró con cierto detalle cuantitativo cómo surgen de la fuerza perturbadora solar.
Gran parte de este trabajo lunar de Newton se realizó en la década de 1680, y el alcance y la precisión de sus primeros pasos en el análisis gravitacional estuvieron limitados por varios factores, incluida su propia elección de desarrollar y presentar el trabajo en lo que era, en general, una forma geométrica difícil, y por la precisión e incertidumbre limitadas de muchas mediciones astronómicas de su época.
El objetivo principal de los sucesores de Newton, desde Leonhard Euler , Alexis Clairaut y Jean d'Alembert a mediados del siglo XVIII hasta Ernest William Brown a finales del siglo XIX y principios del XX, era explicar de forma completa y mucho más precisa los movimientos de la Luna basándose en las leyes de Newton, es decir, las leyes del movimiento y de la gravitación universal por atracciones inversamente proporcionales a los cuadrados de las distancias entre los cuerpos que se atraen. También deseaban poner a prueba la ley de la gravitación del cuadrado inverso, y durante un tiempo en la década de 1740 se puso seriamente en duda, debido a lo que entonces se pensaba que era una gran discrepancia entre las velocidades teóricas de Newton y las observadas en el movimiento del apogeo lunar. Sin embargo, Clairaut demostró poco después (1749-1750) que al menos la causa principal de la discrepancia no residía en la teoría lunar basada en las leyes de Newton, sino en las aproximaciones excesivas en las que él y otros se habían basado para evaluarla.
La mayoría de las mejoras en la teoría posteriores a Newton se hicieron en forma algebraica: implicaron cantidades voluminosas y muy laboriosas de cálculo infinitesimal y trigonometría. También fue necesario, para completar las teorías de este período, recurrir a mediciones observacionales. [30] [31] [32] [33]
Los teóricos lunares utilizaron (e inventaron) muchos enfoques matemáticos diferentes para analizar el problema gravitacional. No es sorprendente que sus resultados tendieran a converger. Desde la época de los primeros analistas gravitacionales entre los sucesores de Newton, Euler , Clairaut y d'Alembert , se reconoció que casi todas las perturbaciones lunares principales podían expresarse en términos de solo unos pocos argumentos y coeficientes angulares. Estos pueden representarse por: [33]
A partir de estos parámetros básicos, bastan cuatro argumentos angulares diferenciales básicos para expresar, en sus diferentes combinaciones, casi todas las perturbaciones más significativas de los movimientos lunares. Se dan aquí con sus símbolos convencionales debidos a Delaunay ; a veces se los conoce como argumentos de Delaunay:
Este trabajo culminó en la teoría lunar de Brown (1897-1908) [34] [35] [36] [37] [38] y las Tablas del movimiento de la Luna (1919). [32] Estas se utilizaron en el American Ephemeris and Nautical Almanac hasta 1968, y en una forma modificada hasta 1984.
Se han nombrado varias de las mayores perturbaciones lunares en longitud (contribuciones a la diferencia entre su longitud eclíptica verdadera y su longitud media). En términos de los argumentos diferenciales, se pueden expresar de la siguiente manera, con coeficientes redondeados al segundo de arco (") más cercano: [39]
Los analistas de mediados del siglo XVIII expresaban las perturbaciones de la posición de la Luna en longitud utilizando unos 25-30 términos trigonométricos. Sin embargo, los trabajos de los siglos XIX y XX condujeron a formulaciones muy diferentes de la teoría, por lo que estos términos ya no son actuales. El número de términos necesarios para expresar la posición de la Luna con la precisión buscada a principios del siglo XX era de más de 1400; y el número de términos necesarios para emular la precisión de las integraciones numéricas modernas basadas en observaciones de medición por láser se cuenta en decenas de miles: no hay límite para el aumento del número de términos necesarios a medida que aumentan los requisitos de precisión. [41]

Desde la Segunda Guerra Mundial y, sobre todo, desde los años 60, la teoría lunar se ha desarrollado de un modo algo diferente, estimulada por dos vías: por un lado, por el uso de la computación digital automática y, por otro, por los tipos de datos de observación modernos, con una exactitud y precisión mucho mayores.
Wallace John Eckert , alumno de Ernest William Brown y empleado de IBM , utilizó las computadoras digitales experimentales desarrolladas allí después de la Segunda Guerra Mundial para calcular las efemérides astronómicas. Uno de los proyectos consistía en introducir la teoría lunar de Brown en la máquina y evaluar las expresiones directamente. Otro proyecto era algo completamente nuevo: una integración numérica de las ecuaciones de movimiento del Sol y los cuatro planetas principales. Esto sólo se hizo posible después de que las computadoras digitales electrónicas estuvieran disponibles. Finalmente, esto condujo a la serie de efemérides de desarrollo del Laboratorio de Propulsión a Chorro .
Mientras tanto, la teoría de Brown fue mejorada con constantes mejores y la introducción del Tiempo de Efemérides y la eliminación de algunas correcciones empíricas asociadas con esto. Esto condujo a las Efemérides Lunares Mejoradas (ILE), [33] que, con algunas mejoras sucesivas menores, se utilizaron en los almanaques astronómicos desde 1960 hasta 1983 [42] [c] y permitieron misiones de aterrizaje lunar .
La mejora más significativa de las observaciones de la posición de la Luna han sido las mediciones de alcance láser lunar , obtenidas utilizando láseres terrestres y retrorreflectores especiales colocados en la superficie de la Luna. El tiempo de vuelo de un pulso de luz láser a uno de los retrorreflectores y de regreso proporciona una medida de la distancia de la Luna en ese momento. El primero de los cinco retrorreflectores que están operativos hoy en día fue llevado a la Luna en la nave espacial Apolo 11 en julio de 1969 y colocado en una posición adecuada en la superficie de la Luna por Buzz Aldrin . [43] La precisión del alcance se ha ampliado aún más mediante la Operación de alcance láser lunar del Observatorio Apache Point , establecida en 2005.
La teoría lunar, desarrollada numéricamente con gran precisión utilizando estas medidas modernas, se basa en una gama más amplia de consideraciones que las teorías clásicas: tiene en cuenta no sólo las fuerzas gravitacionales (con correcciones relativistas), sino también muchos efectos de mareas y geofísicos y una teoría muy ampliada de la libración lunar . Como muchos otros campos científicos, este se ha desarrollado de modo que se basa en el trabajo de grandes equipos e instituciones. Una institución que ha desempeñado un papel destacado en estos desarrollos ha sido el Laboratorio de Propulsión a Chorro (JPL) del Instituto de Tecnología de California ; y los nombres particularmente asociados con la transición, desde principios de los años 1970 en adelante, de las teorías y efemérides lunares clásicas hacia el estado moderno de la ciencia incluyen los de J. Derral Mulholland y JG Williams, y para el desarrollo vinculado de las efemérides del sistema solar (planetarias) E. Myles Standish. [44]
Desde la década de 1970, el JPL ha producido una serie de efemérides de desarrollo numéricamente integradas (numeradas DExxx), que incorporan efemérides lunares (LExxx). Las efemérides planetarias y lunares DE200/LE200 se utilizaron en las efemérides oficiales del Almanaque Astronómico para el período 1984-2002, y las efemérides DE405/LE405 , de mayor precisión y exactitud, se han utilizado a partir de la edición de 2003. [45] La efeméride actual es DE440. [46]
Paralelamente a estos avances, en los últimos años se ha desarrollado una nueva clase de teoría analítica lunar, en particular la Ephemeride Lunaire Parisienne [47] de Jean Chapront y Michelle Chapront-Touzé del Bureau des Longitudes . Mediante el uso del álgebra asistida por ordenador, los avances analíticos se han llevado más lejos de lo que antes podían hacer los analistas clásicos trabajando manualmente. Además, algunas de estas nuevas teorías analíticas (como la ELP) se han adaptado a las efemérides numéricas desarrolladas previamente en el JPL, como se mencionó anteriormente. Los principales objetivos de estas teorías analíticas recientes, en contraste con los objetivos de las teorías clásicas de siglos pasados, no han sido generar datos posicionales mejorados para las fechas actuales; más bien, sus objetivos han incluido el estudio de otros aspectos del movimiento, como las propiedades a largo plazo, que pueden no ser tan fácilmente evidentes a partir de las propias teorías numéricas modernas. [48]















