Una partícula se ve perturbada en su movimiento rectilíneo uniforme por una serie de impulsos cortos (1, 2, ...), lo que le da a su trayectoria una forma casi circular. La fuerza se denomina fuerza centrípeta en el límite de una fuerza que actúa continuamente y está dirigida hacia el centro de curvatura de la trayectoria.
Una fuerza centrípeta (del latín centrum , «centro» y petere , «buscar» [1] ) es una fuerza que hace que un cuerpo siga una trayectoria curva . La dirección de la fuerza centrípeta es siempre ortogonal al movimiento del cuerpo y hacia el punto fijo del centro instantáneo de curvatura de la trayectoria. Isaac Newton la describió como «una fuerza por la cual los cuerpos son atraídos o impelidos, o de cualquier manera tienden, hacia un punto como a un centro». [2] En la mecánica newtoniana , la gravedad proporciona la fuerza centrípeta que causa las órbitas astronómicas .
Un ejemplo común de fuerza centrípeta es el caso en el que un cuerpo se mueve con velocidad uniforme a lo largo de una trayectoria circular. La fuerza centrípeta se dirige en ángulos rectos con respecto al movimiento y también a lo largo del radio hacia el centro de la trayectoria circular. [3] [4] La descripción matemática fue derivada en 1659 por el físico holandés Christiaan Huygens . [5]
Fórmula
De la cinemática del movimiento curvo se sabe que un objeto que se mueve a velocidad tangencial v a lo largo de una trayectoria con radio de curvatura r acelera hacia el centro de curvatura a una velocidad a c = lim Δ t → 0 Δ v Δ t , a c = v 2 r {\displaystyle {\textbf {a}}_{c}=\lim _{\Delta t\to 0}{\frac {\Delta {\textbf {v}}}{\Delta t}},\quad a_{c}={\frac {v^{2}}{r}}}
Aquí, es la aceleración centrípeta y es la diferencia entre los vectores de velocidad en y .
Según la segunda ley de Newton , la causa de la aceleración es una fuerza neta que actúa sobre el objeto, que es proporcional a su masa m y a su aceleración. La fuerza, normalmente denominada fuerza centrípeta , tiene una magnitud [6] F c = m a c = m v 2 r {\displaystyle F_{c}=ma_{c}=m{\frac {v^{2}}{r}}}
y, al igual que la aceleración centrípeta, se dirige hacia el centro de curvatura de la trayectoria del objeto.
Derivación
La aceleración centrípeta se puede inferir del diagrama de los vectores de velocidad en dos instancias. En el caso del movimiento circular uniforme, las velocidades tienen magnitud constante. Debido a que cada una es perpendicular a su respectivo vector de posición, la simple resta de vectores implica dos triángulos isósceles similares con ángulos congruentes: uno que comprende una base de y una longitud de cateto de , y el otro una base de ( diferencia de vectores de posición ) y una longitud de cateto de : [7]
Por lo tanto, se puede sustituir por : [7]
La dirección de la fuerza es hacia el centro del círculo en el que se mueve el objeto, o el círculo osculador (el círculo que mejor se ajusta a la trayectoria local del objeto, si la trayectoria no es circular). [8]
La velocidad en la fórmula está elevada al cuadrado, por lo que el doble de la velocidad necesita cuatro veces la fuerza, en un radio dado.
Esta fuerza también se escribe a veces en términos de la velocidad angular ω del objeto alrededor del centro del círculo, relacionada con la velocidad tangencial mediante la fórmula
, de modo que
Expresada utilizando el período orbital T para una revolución del círculo, ω = 2 π T {\displaystyle \omega ={\frac {2\pi }{T}}}
la ecuación se convierte en [9]
En los aceleradores de partículas, la velocidad puede ser muy alta (cercana a la velocidad de la luz en el vacío), por lo que la misma masa en reposo ahora ejerce mayor inercia (masa relativista), requiriendo así mayor fuerza para la misma aceleración centrípeta, por lo que la ecuación se convierte en: [10]
donde γ = 1 1 − v 2 c 2 {\displaystyle \gamma ={\frac {1}{\sqrt {1-{\frac {v^{2}}{c^{2}}}}}}}
es el factor de Lorentz .
Por lo tanto, la fuerza centrípeta viene dada por:
que es la tasa de cambio del momento relativista .
Fuentes
Un cuerpo que experimenta un movimiento circular uniforme requiere una fuerza centrípeta, hacia el eje como se muestra, para mantener su trayectoria circular.
En el caso de un objeto que oscila en el extremo de una cuerda en un plano horizontal, la fuerza centrípeta sobre el objeto es proporcionada por la tensión de la cuerda. El ejemplo de la cuerda es un ejemplo que implica una fuerza de "tracción". La fuerza centrípeta también puede proporcionarse como una fuerza de "empuje", como en el caso en el que la reacción normal de una pared proporciona la fuerza centrípeta para un muro de la muerte o un jinete del Rotor .
La idea de Newton de fuerza centrípeta corresponde a lo que hoy en día se denomina fuerza central . Cuando un satélite está en órbita alrededor de un planeta , la gravedad se considera una fuerza centrípeta, aunque en el caso de órbitas excéntricas, la fuerza gravitatoria se dirige hacia el foco y no hacia el centro instantáneo de curvatura. [11]
Otro ejemplo de fuerza centrípeta se da en la hélice que se traza cuando una partícula cargada se mueve en un campo magnético uniforme en ausencia de otras fuerzas externas. En este caso, la fuerza magnética es la fuerza centrípeta que actúa hacia el eje de la hélice.
Análisis de varios casos
A continuación se presentan tres ejemplos de complejidad creciente, con derivaciones de las fórmulas que rigen la velocidad y la aceleración.
Movimiento circular uniforme
El movimiento circular uniforme se refiere al caso de velocidad de rotación constante. A continuación se presentan dos enfoques para describir este caso.
Derivación del cálculo
En dos dimensiones, el vector de posición , que tiene magnitud (longitud) y está dirigido en un ángulo sobre el eje x, se puede expresar en coordenadas cartesianas utilizando los vectores unitarios y : [12]
El objeto se mueve con velocidad angular constante alrededor del círculo. Por lo tanto, donde es el tiempo.
La velocidad y la aceleración del movimiento son la primera y segunda derivadas de la posición con respecto al tiempo:
v = r ˙ = − r ω sen ( ω t ) x ^ + r ω cos ( ω t ) y ^ , {\displaystyle {\textbf {v}}={\dot {\textbf {r}}}=-r\omega \sin(\omega t){\hat {\mathbf {x} }}+r\omega \cos(\omega t){\hat {\mathbf {y} }},} a = r ¨ = − ω 2 ( r cos ( ω t ) x ^ + r sen ( ω t ) y ^ ) . {\displaystyle {\textbf {a}}={\ddot {\textbf {r}}}=-\omega ^{2}(r\cos(\omega t){\hat {\mathbf {x} }}+r\sin(\omega t){\hat {\mathbf {y} }}).}
El término entre paréntesis es la expresión original de en coordenadas cartesianas . En consecuencia,
negativo indica que la aceleración apunta hacia el centro del círculo (opuesto al radio), de ahí que se le denomine "centrípeta" (es decir, "que busca el centro"). Mientras que los objetos siguen naturalmente una trayectoria recta (debido a la inercia ), esta aceleración centrípeta describe la trayectoria del movimiento circular causado por una fuerza centrípeta.
Derivación mediante vectores
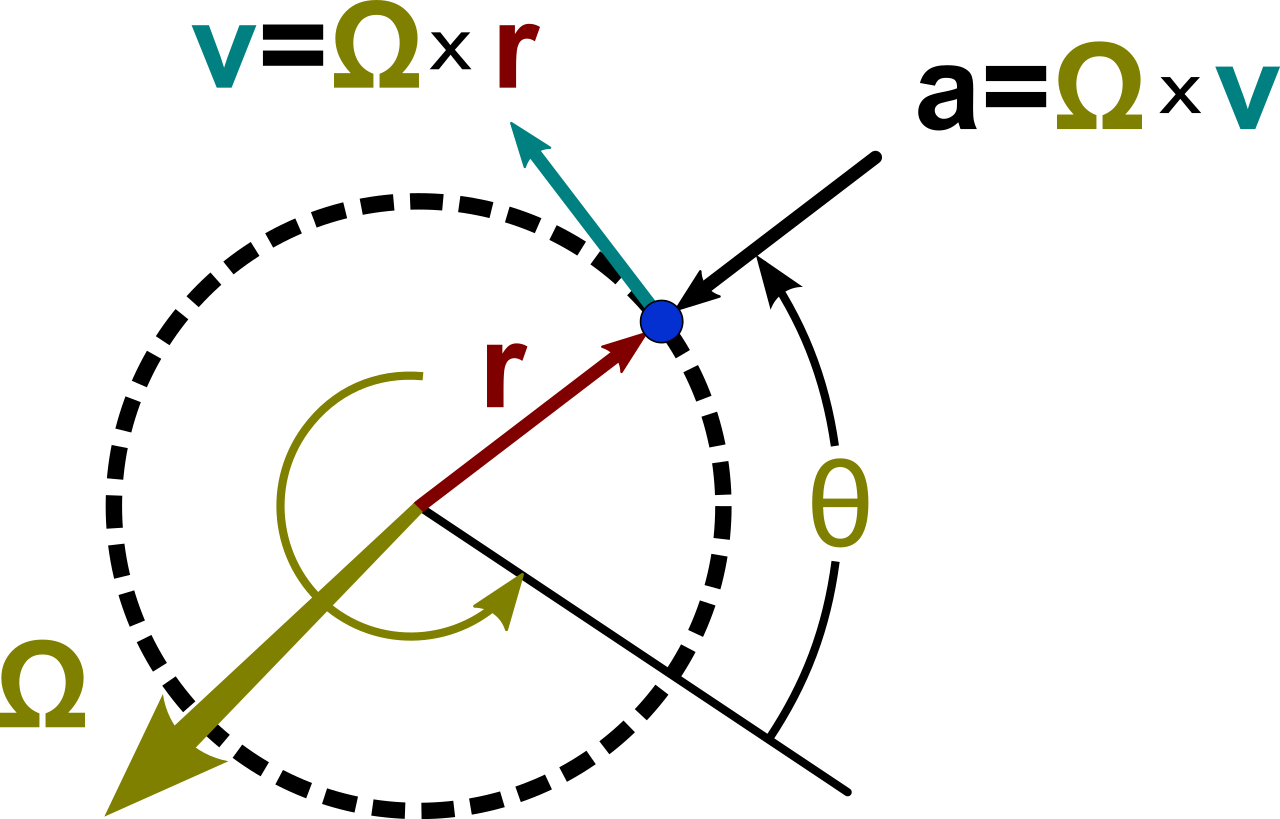
Relaciones vectoriales para movimiento circular uniforme; el vector Ω que representa la rotación es normal al plano de la órbita con polaridad determinada por la regla de la mano derecha y magnitud dθ / dt .
La imagen de la derecha muestra las relaciones vectoriales para el movimiento circular uniforme. La rotación en sí está representada por el vector de velocidad angular Ω , que es normal al plano de la órbita (usando la regla de la mano derecha ) y tiene una magnitud dada por:
donde θ es la posición angular en el tiempo t . En esta subsección, se supone que d θ /d t es constante, independientemente del tiempo. La distancia recorrida dℓ de la partícula en el tiempo d t a lo largo de la trayectoria circular es
que, por propiedades del producto vectorial , tiene magnitud r d θ y está en la dirección tangente a la trayectoria circular.
Aplicando la fórmula de Lagrange con la observación de que Ω • r ( t ) = 0 en todo momento,
En palabras, la aceleración apunta directamente opuesta al desplazamiento radial r en todo momento, y tiene una magnitud:
donde las barras verticales |...| denotan la magnitud del vector, que en el caso de r ( t ) es simplemente el radio r de la trayectoria. Este resultado concuerda con la sección anterior, aunque la notación es ligeramente diferente.
Cuando la velocidad de rotación se hace constante en el análisis del movimiento circular no uniforme, ese análisis concuerda con éste.
Una ventaja del enfoque vectorial es que es manifiestamente independiente de cualquier sistema de coordenadas.
Ejemplo: El giro peraltado
Panel superior: Pelota sobre una pista circular peraltada que se mueve con velocidad constante v ; Panel inferior: Fuerzas sobre la pelota
El panel superior de la imagen de la derecha muestra una pelota en movimiento circular en una curva peraltada. La curva está peraltada en un ángulo θ respecto de la horizontal y la superficie de la carretera se considera resbaladiza. El objetivo es encontrar qué ángulo debe tener la pendiente para que la pelota no se deslice fuera de la carretera. [13] La intuición nos dice que, en una curva plana sin peralte en absoluto, la pelota simplemente se deslizará fuera de la carretera; mientras que con un peralte muy pronunciado, la pelota se deslizará hacia el centro a menos que recorra la curva rápidamente.
Aparte de cualquier aceleración que pueda ocurrir en la dirección de la trayectoria, el panel inferior de la imagen de arriba indica las fuerzas sobre la pelota. Hay dos fuerzas; una es la fuerza de gravedad verticalmente hacia abajo a través del centro de masa de la pelota m g , donde m es la masa de la pelota y g es la aceleración gravitacional ; la segunda es la fuerza normal hacia arriba ejercida por la carretera en un ángulo recto con la superficie de la carretera m a n . La fuerza centrípeta demandada por el movimiento curvo también se muestra arriba. Esta fuerza centrípeta no es una tercera fuerza aplicada a la pelota, sino que debe ser proporcionada por la fuerza neta sobre la pelota resultante de la suma vectorial de la fuerza normal y la fuerza de gravedad . La fuerza resultante o neta sobre la pelota encontrada por la suma vectorial de la fuerza normal ejercida por la carretera y la fuerza vertical debida a la gravedad debe ser igual a la fuerza centrípeta dictada por la necesidad de recorrer una trayectoria circular. El movimiento curvo se mantiene siempre que esta fuerza neta proporcione la fuerza centrípeta necesaria para el movimiento.
La fuerza neta horizontal sobre la pelota es el componente horizontal de la fuerza de la carretera, que tiene magnitud | F h | = m | a n | sen θ . El componente vertical de la fuerza de la carretera debe contrarrestar la fuerza gravitacional: | F v | = m | a n | cos θ = m | g | , lo que implica | a n | = | g | / cos θ . Sustituyendo en la fórmula anterior para | F h | se obtiene una fuerza horizontal que es: | F h | = m | g | sen θ cos θ = m | g | tan θ . {\displaystyle |\mathbf {F} _{\mathrm {h} }|=m|\mathbf {g} |{\frac {\sin \theta }{\cos \theta }}=m|\mathbf {g} |\tan \theta \,.}
Por otra parte, a la velocidad | v | en una trayectoria circular de radio r , la cinemática dice que la fuerza necesaria para girar la pelota de forma continua en el giro es la fuerza centrípeta radial hacia adentro F c de magnitud:
En consecuencia, la pelota está en una trayectoria estable cuando el ángulo de la carretera se establece para satisfacer la condición:
o,
A medida que el ángulo de inclinación θ se acerca a 90°, la función tangente se acerca al infinito, lo que permite valores mayores para | v | 2 / r . En palabras, esta ecuación establece que para velocidades mayores (mayor | v |) la carretera debe estar más inclinada (un valor mayor para θ ), y para curvas más cerradas (menor r ) la carretera también debe estar más inclinada, lo que concuerda con la intuición. Cuando el ángulo θ no satisface la condición anterior, el componente horizontal de la fuerza ejercida por la carretera no proporciona la fuerza centrípeta correcta, y se requiere una fuerza de fricción adicional tangencial a la superficie de la carretera para proporcionar la diferencia. Si la fricción no puede hacer esto (es decir, se excede el coeficiente de fricción ), la bola se desliza a un radio diferente donde se puede lograr el equilibrio. [14] [15]
Estas ideas se aplican también a los vuelos aéreos. Véase el manual del piloto de la FAA. [16]
Movimiento circular no uniforme
/ .
Como generalización del caso de movimiento circular uniforme, supongamos que la velocidad angular de rotación no es constante. La aceleración ahora tiene un componente tangencial, como se muestra en la imagen de la derecha. Este caso se utiliza para demostrar una estrategia de derivación basada en un sistema de coordenadas polares .
Sea r ( t ) un vector que describe la posición de una masa puntual en función del tiempo. Puesto que estamos suponiendo un movimiento circular , sea r ( t ) = R · u r , donde R es una constante (el radio del círculo) y u r es el vector unitario que apunta desde el origen a la masa puntual. La dirección de u r se describe mediante θ , el ángulo entre el eje x y el vector unitario, medido en sentido antihorario desde el eje x. El otro vector unitario para coordenadas polares, u θ es perpendicular a u r y apunta en la dirección de aumento de θ . Estos vectores unitarios polares se pueden expresar en términos de vectores unitarios cartesianos en las direcciones x e y , denotados y respectivamente: [17] y
Se puede diferenciar para encontrar la velocidad:
donde ω es la velocidad angular dθ / dt .
Este resultado para la velocidad coincide con las expectativas de que la velocidad debería estar dirigida tangencialmente al círculo y que la magnitud de la velocidad debería ser rω . Derivando nuevamente y notando que
encontramos que la aceleración, a es:
Por lo tanto, los componentes radial y tangencial de la aceleración son: y
donde | v | = r ω es la magnitud de la velocidad (la rapidez).
Vectores cinemáticos en coordenadas polares planas. Observe que la configuración no está restringida al espacio 2D, sino a un plano en cualquier dimensión superior.
Vectores unitarios polares en dos instantes t y t + dt para una partícula con trayectoria r ( t ); a la izquierda, los vectores unitarios u ρ y u θ en los dos instantes se mueven de modo que sus colas se encuentran y se muestra que trazan un arco de un círculo de radio unitario. Su rotación en el tiempo dt es d θ, exactamente el mismo ángulo que la rotación de la trayectoria r ( t ).
Coordenadas polares
Los resultados anteriores se pueden derivar quizás de forma más sencilla en coordenadas polares y, al mismo tiempo, extenderse al movimiento general dentro de un plano, como se muestra a continuación. Las coordenadas polares en el plano emplean un vector unitario radial u ρ y un vector unitario angular u θ , como se muestra arriba. [18] Una partícula en la posición r se describe por:
donde la notación ρ se utiliza para describir la distancia de la trayectoria desde el origen en lugar de R para enfatizar que esta distancia no es fija, sino que varía con el tiempo. El vector unitario u ρ viaja con la partícula y siempre apunta en la misma dirección que r ( t ). El vector unitario u θ también viaja con la partícula y permanece ortogonal a u ρ . Por lo tanto, u ρ y u θ forman un sistema de coordenadas cartesianas local unido a la partícula y ligado a la trayectoria recorrida por la partícula. [19] Al mover los vectores unitarios para que sus colas coincidan, como se ve en el círculo a la izquierda de la imagen de arriba, se ve que u ρ y u θ forman un par rectángulo con puntas en el círculo unitario que trazan de ida y vuelta en el perímetro de este círculo con el mismo ángulo θ ( t ) que r ( t ).
Cuando la partícula se mueve, su velocidad es
Para evaluar la velocidad, se necesita la derivada del vector unitario u ρ . Debido a que u ρ es un vector unitario, su magnitud es fija y solo puede cambiar en dirección, es decir, su cambio d u ρ tiene un componente solo perpendicular a u ρ . Cuando la trayectoria r ( t ) gira una cantidad d θ , u ρ , que apunta en la misma dirección que r ( t ), también gira d θ . Vea la imagen de arriba. Por lo tanto, el cambio en u ρ es
o
De manera similar, se encuentra la tasa de cambio de u θ . Al igual que con u ρ , u θ es un vector unitario y solo puede rotar sin cambiar de tamaño. Para permanecer ortogonal a u ρ mientras la trayectoria r ( t ) rota una cantidad d θ , u θ , que es ortogonal a r ( t ), también rota en d θ . Vea la imagen de arriba. Por lo tanto, el cambio d u θ es ortogonal a u θ y proporcional a d θ (vea la imagen de arriba):
La ecuación anterior muestra que el signo es negativo: para mantener la ortogonalidad, si d u ρ es positivo con d θ , entonces d u θ debe disminuir.
Sustituyendo la derivada de u ρ en la expresión de la velocidad:
Para obtener la aceleración se realiza otra diferenciación temporal:
Sustituyendo las derivadas de u ρ y u θ , la aceleración de la partícula es: [20]
Como ejemplo particular, si la partícula se mueve en un círculo de radio constante R , entonces d ρ /d t = 0, v = v θ , y:
dónde
Estos resultados concuerdan con los anteriores para el movimiento circular no uniforme. Véase también el artículo sobre el movimiento circular no uniforme . Si esta aceleración se multiplica por la masa de la partícula, el término principal es la fuerza centrípeta y el negativo del segundo término relacionado con la aceleración angular se denomina a veces fuerza de Euler . [21]
Para trayectorias distintas del movimiento circular, por ejemplo, la trayectoria más general imaginada en la imagen anterior, el centro instantáneo de rotación y el radio de curvatura de la trayectoria están relacionados solo indirectamente con el sistema de coordenadas definido por u ρ y u θ y con la longitud | r ( t )| = ρ . En consecuencia, en el caso general, no es sencillo desenredar los términos centrípetos y de Euler de la ecuación de aceleración general anterior. [22] [23] Para abordar directamente esta cuestión, son preferibles las coordenadas locales, como se analiza a continuación.
Coordenadas locales
Sistema de coordenadas local para el movimiento plano sobre una curva. Se muestran dos posiciones diferentes para las distancias s y s + ds a lo largo de la curva. En cada posición s , el vector unitario u n apunta a lo largo de la normal exterior a la curva y el vector unitario u t es tangente a la trayectoria. El radio de curvatura de la trayectoria es ρ , que se obtiene a partir de la velocidad de rotación de la tangente a la curva con respecto a la longitud del arco, y es el radio del círculo osculador en la posición s . El círculo unitario de la izquierda muestra la rotación de los vectores unitarios con s .
Las coordenadas locales son un conjunto de coordenadas que viajan con la partícula, [24] y tienen una orientación determinada por la trayectoria de la partícula. [25] Los vectores unitarios se forman como se muestra en la imagen de la derecha, tanto tangenciales como normales a la trayectoria. Este sistema de coordenadas a veces se denomina coordenadas intrínsecas o de trayectoria [26] [27] o nt-coordinates , para normal-tangencial , haciendo referencia a estos vectores unitarios. Estas coordenadas son un ejemplo muy especial de un concepto más general de coordenadas locales de la teoría de formas diferenciales. [28]
La distancia a lo largo de la trayectoria de la partícula es la longitud del arco s , considerada como una función conocida del tiempo.
En cada posición s se define un centro de curvatura ubicado a una distancia ρ (el radio de curvatura ) de la curva en una línea a lo largo de la normal u n ( s ). La distancia requerida ρ ( s ) en la longitud de arco s se define en términos de la velocidad de rotación de la tangente a la curva, que a su vez está determinada por la trayectoria misma. Si la orientación de la tangente con respecto a alguna posición inicial es θ ( s ), entonces ρ ( s ) se define por la derivada d θ /d s :
El radio de curvatura generalmente se toma como positivo (es decir, como un valor absoluto), mientras que la curvatura κ es una cantidad con signo.
Un enfoque geométrico para encontrar el centro de curvatura y el radio de curvatura utiliza un proceso limitante que conduce al círculo osculador . [29] [30] Véase la imagen de arriba.
Utilizando estas coordenadas, el movimiento a lo largo de la trayectoria se considera como una sucesión de trayectorias circulares con un centro que cambia constantemente, y en cada posición s constituye un movimiento circular no uniforme en esa posición con un radio ρ . El valor local de la velocidad angular de rotación se da entonces por:
con la velocidad local v dada por:
En cuanto a los otros ejemplos anteriores, debido a que los vectores unitarios no pueden cambiar de magnitud, su tasa de cambio es siempre perpendicular a su dirección (ver el recuadro de la izquierda en la imagen de arriba): [31]
En consecuencia, la velocidad y la aceleración son: [30] [32] [33]
En este sistema de coordenadas local, la aceleración se asemeja a la expresión para el movimiento circular no uniforme con el radio local ρ ( s ), y la aceleración centrípeta se identifica como el segundo término. [34]
La extensión de este enfoque a curvas espaciales tridimensionales conduce a las fórmulas de Frenet-Serret . [35] [36]
Enfoque alternativo
Al observar la imagen de arriba, uno podría preguntarse si se ha tenido en cuenta adecuadamente la diferencia de curvatura entre ρ ( s ) y ρ ( s + d s ) al calcular la longitud del arco como d s = ρ ( s )d θ . Se puede encontrar tranquilidad sobre este punto utilizando un enfoque más formal que se describe a continuación. Este enfoque también se relaciona con el artículo sobre curvatura .
Para introducir los vectores unitarios del sistema de coordenadas local, un enfoque consiste en comenzar con coordenadas cartesianas y describir las coordenadas locales en términos de estas coordenadas cartesianas. En términos de la longitud de arco s , describamos la trayectoria como: [37]
Entonces, un desplazamiento incremental a lo largo de la trayectoria d s se describe mediante:
donde se introducen primos para denotar derivadas con respecto a s . La magnitud de este desplazamiento es d s , lo que demuestra que: [38]
(Ecuación 1)
Este desplazamiento es necesariamente tangente a la curva en s , lo que demuestra que el vector unitario tangente a la curva es:
mientras que el vector unitario externo normal a la curva es
La ortogonalidad se puede verificar demostrando que el producto escalar de los vectores es cero. La magnitud unitaria de estos vectores es una consecuencia de la ecuación 1. Utilizando el vector tangente, el ángulo θ de la tangente a la curva viene dado por: y
El radio de curvatura se introduce de forma completamente formal (sin necesidad de interpretación geométrica) como:
La derivada de θ se puede encontrar a partir de la de sen θ :
Ahora:
en donde el denominador es la unidad. Con esta fórmula para la derivada del seno, el radio de curvatura se convierte en:
donde la equivalencia de las formas surge de la diferenciación de la ecuación 1:
Con estos resultados, la aceleración se puede encontrar:
como se puede verificar tomando el producto escalar con los vectores unitarios u t ( s ) y u n ( s ). Este resultado para la aceleración es el mismo que para el movimiento circular basado en el radio ρ . Usando este sistema de coordenadas en el marco inercial, es fácil identificar la fuerza normal a la trayectoria como la fuerza centrípeta y la paralela a la trayectoria como la fuerza tangencial. Desde un punto de vista cualitativo, la trayectoria se puede aproximar por un arco de círculo durante un tiempo limitado, y para el tiempo limitado que se aplica un radio de curvatura particular, las fuerzas centrífuga y de Euler se pueden analizar sobre la base del movimiento circular con ese radio.
Este resultado para la aceleración concuerda con el encontrado anteriormente. Sin embargo, en este enfoque, la cuestión del cambio en el radio de curvatura con s se maneja de manera completamente formal, consistente con una interpretación geométrica, pero sin depender de ella, evitando así cualquier pregunta que la imagen anterior podría sugerir sobre descuidar la variación en ρ .
Ejemplo: movimiento circular
Para ilustrar las fórmulas anteriores, supongamos que x , y se expresan como:
Entonces:
que puede reconocerse como una trayectoria circular alrededor del origen con radio α . La posición s = 0 corresponde a [ α , 0], o las 3 en punto. Para utilizar el formalismo anterior, se necesitan las derivadas:
Con estos resultados se puede comprobar que:
Los vectores unitarios también se pueden encontrar:
que sirven para mostrar que s = 0 se encuentra en la posición [ ρ , 0] y s = ρ π/2 en [0, ρ ], lo que concuerda con las expresiones originales para x e y . En otras palabras, s se mide en sentido antihorario alrededor del círculo a partir de las 3 en punto. Además, se pueden encontrar las derivadas de estos vectores:
Para obtener la velocidad y la aceleración, es necesaria una dependencia temporal de s . Para un movimiento en sentido antihorario a velocidad variable v ( t ):
donde v ( t ) es la velocidad y t es el tiempo, y s ( t = 0) = 0. Entonces:
^ Craig, John (1849). Un nuevo diccionario universal etimológico, tecnológico y de pronunciación de la lengua inglesa: abarca todos los términos utilizados en el arte, la ciencia y la literatura, Volumen 1. Universidad de Harvard. pág. 291.Extracto de la página 291
^ Newton, Isaac (2010). Los principia: principios matemáticos de la filosofía natural . [Sl]: Snowball Pub. p. 10. ISBN978-1-60796-240-3.
^ Russelkl C Hibbeler (2009). "Ecuaciones de movimiento: coordenadas normales y tangenciales". Ingeniería mecánica: dinámica (12.ª ed.). Prentice Hall. pág. 131. ISBN978-0-13-607791-6.
^ Paul Allen Tipler; Gene Mosca (2003). Física para científicos e ingenieros (5.ª ed.). Macmillan. pág. 129. ISBN978-0-7167-8339-8.
^ P. Germain; M. Piau; D. Caillerie, eds. (2012). Mecánica teórica y aplicada. Elsevier. ISBN9780444600202.
^ Chris Carter (2001). Datos y práctica para el nivel A: Física . S.2.: Oxford University Press. pág. 30. ISBN978-0-19-914768-7.{{cite book}}: CS1 maint: location (link)
^ desde OpenStax CNX. "Movimiento circular uniforme".
^ Eugene Lommel; George William Myers (1900). Física experimental. K. Paul, Trench, Trübner & Co., pág. 63.
^ Colwell, Catharine H. "Una derivación de las fórmulas para la aceleración centrípeta". PhysicsLAB . Archivado desde el original el 15 de agosto de 2011. Consultado el 31 de julio de 2011 .
^ Conte, Mario; Mackay, William W (1991). Introducción a la física de los aceleradores de partículas. World Scientific. pág. 8. ISBN978-981-4518-00-0.Extracto de la página 8
^ Theo Koupelis (2010). En busca del universo (6.ª ed.). Jones & Bartlett Learning. pág. 83. ISBN978-0-7637-6858-4.
^ AV Durrant (1996). Vectores en física e ingeniería. CRC Press. pág. 103. ISBN978-0-412-62710-1.
^ Lawrence S. Lerner (1997). Física para científicos e ingenieros. Boston: Jones & Bartlett Publishers. pág. 128. ISBN.978-0-86720-479-7.
^ Arthur Beiser (2004). Esquema de física aplicada de Schaum. Nueva York: McGraw-Hill Professional. pág. 103. ISBN.978-0-07-142611-4.
^ Alan Darbyshire (2003). Ingeniería mecánica: Unidades de opción nacional BTEC. Oxford: Newnes. p. 56. ISBN978-0-7506-5761-7.
^ Administración Federal de Aviación (2007). Enciclopedia de conocimientos aeronáuticos para pilotos. Oklahoma City, OK: Skyhorse Publishing Inc. Figura 3-21. ISBN978-1-60239-034-8.
^ Nota: a diferencia de los vectores unitarios cartesianos y , que son constantes, en coordenadas polares la dirección de los vectores unitarios u r y u θ dependen de θ y, por lo tanto, en general tienen derivadas temporales distintas de cero.
^ Aunque el sistema de coordenadas polares se mueve con la partícula, el observador no lo hace. La descripción del movimiento de la partícula sigue siendo una descripción desde el punto de vista del observador estacionario.
^ Nótese que este sistema de coordenadas local no es autónomo; por ejemplo, su rotación en el tiempo está determinada por la trayectoria trazada por la partícula. El vector radial r ( t ) no representa el radio de curvatura de la trayectoria.
^ John Robert Taylor (2005). Mecánica clásica. Sausalito, CA: University Science Books. Págs. 28-29. ISBN.978-1-891389-22-1.
^ Cornelius Lanczos (1986). Los principios variacionales de la mecánica. Nueva York: Courier Dover Publications. pág. 103. ISBN.978-0-486-65067-8.
^ SY Lee (2004). Física de aceleradores (2.ª ed.). Hackensack, NJ: World Scientific. pág. 37. ISBN978-981-256-182-4.
^ El observador del movimiento a lo largo de la curva utiliza estas coordenadas locales para describir el movimiento desde su marco de referencia , es decir, desde un punto de vista estacionario. En otras palabras, aunque el sistema de coordenadas local se mueve con la partícula, el observador no lo hace. Un cambio en el sistema de coordenadas utilizado por el observador es solo un cambio en su descripción de las observaciones y no significa que el observador haya cambiado su estado de movimiento, y viceversa .
^ Zhilin Li; Kazufumi Ito (2006). El método de la interfaz inmersa: soluciones numéricas de ecuaciones diferenciales parciales que involucran interfaces y dominios irregulares. Filadelfia: Society for Industrial and Applied Mathematics. p. 16. ISBN978-0-89871-609-2.
^ Lakshmana C. Rao; J. Lakshminarasimhan; Raju Sethuraman; SM Sivakuma (2004). Dinámica de ingeniería: estática y dinámica. Prentice Hall de India. pág. 133. ISBN978-81-203-2189-2.
^ Shigeyuki Morita (2001). Geometría de formas diferenciales . American Mathematical Society. pág. 1. ISBN978-0-8218-1045-3. coordenadas locales.
^ El círculo osculador en un punto dado P de una curva es el círculo límite de una secuencia de círculos que pasan por P y otros dos puntos de la curva, Q y R , a cada lado de P , cuando Q y R se aproximan a P . Véase el texto en línea de Lamb: Horace Lamb (1897). Un curso elemental de cálculo infinitesimal. University Press. p. 406. ISBN 978-1-108-00534-0. círculo osculador.
^ de Guang Chen; Fook Fah Yap (2003). Introducción a la dinámica planar (3.ª ed.). Central Learning Asia/Thomson Learning Asia. pág. 34. ISBN978-981-243-568-2.
^ R. Douglas Gregory (2006). Mecánica clásica: un texto de pregrado. Cambridge University Press. pág. 20. ISBN978-0-521-82678-5.
^ Jerry H. Ginsberg (2007). Dinámica de ingeniería. Cambridge University Press. pág. 33. ISBN978-0-521-88303-0.
^ Joseph F. Shelley (1990). 800 problemas resueltos de mecánica vectorial para ingenieros: dinámica. McGraw-Hill Professional. pág. 47. ISBN978-0-07-056687-3.
^ Larry C. Andrews; Ronald L. Phillips (2003). Técnicas matemáticas para ingenieros y científicos. SPIE Press. pág. 164. ISBN978-0-8194-4506-3.
^ Ch V Ramana Murthy; NC Srinivas (2001). Matemáticas Aplicadas. Nueva Delhi: S. Chand & Co. p. 337. ISBN978-81-219-2082-7.
^ El artículo sobre curvatura trata un caso más general en el que la curva está parametrizada por una variable arbitraria (denotada t ), en lugar de por la longitud del arco s .
^ Ahmed A. Shabana; Khaled E. Zaazaa; Hiroyuki Sugiyama (2007). Dinámica de vehículos ferroviarios: un enfoque computacional. CRC Press. pág. 91. ISBN978-1-4200-4581-9.
Lectura adicional
Serway, Raymond A.; Jewett, John W. (2004). Física para científicos e ingenieros (6.ª ed.). Brooks/Cole. ISBN 978-0-534-40842-8.
Tipler, Paul (2004). Física para científicos e ingenieros: mecánica, oscilaciones y ondas, termodinámica (5.ª ed.). WH Freeman. ISBN 978-0-7167-0809-4.
Fuerza centrípeta vs. fuerza centrífuga, de un tutorial de física en línea para el examen Regents del Distrito Escolar de la Ciudad de Oswego
Enlaces externos
Busque centrípeto en Wikcionario, el diccionario libre.
Notas de Física y Astronomía HyperPhysics en la Universidad Estatal de Georgia






































![{\displaystyle \mathbf {a} \ {\stackrel {\mathrm {def} }{=}}\ {\frac {\mathrm {d} \mathbf {v} }{d\mathrm {t} }}=\ mathbf {\Omega } \times {\frac {\mathrm {d} \mathbf {r} (t)}{\mathrm {d} t}}=\mathbf {\Omega } \times \left[\mathbf {\ Omega } \times \mathbf {r} (t)\right]\ .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/55bdc59db211dba1e224034884d244146c97c2ba)






















![{\displaystyle {\begin{aligned}\mathbf {a} &={\frac {\mathrm {d} ^{2}\rho }{\mathrm {d} t^{2}}}\mathbf {u} _{\rho }+2{\frac {\mathrm {d} \rho }{\mathrm {d} t}}\mathbf {u} _{\theta }{\frac {\mathrm {d} \theta } {\mathrm {d} t}}-\rho \mathbf {u} _{\rho }\left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^ {2}+\rho \mathbf {u} _{\theta }{\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\ ,\\&=\mathbf {u} _{\rho }\left[{\frac {\mathrm {d} ^{2}\rho }{\mathrm {d} t^ {2}}}-\rho \left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}\right]+\mathbf {u} _{ \theta }\left[2{\frac {\mathrm {d} \rho }{\mathrm {d} t}}{\frac {\mathrm {d} \theta }{\mathrm {d} t}}+ \rho {\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\right]\\&=\mathbf {u} _{\rho }\left[{\frac {\mathrm {d} v_{\rho }}{\mathrm {d} t}}-{\frac {v_{\theta }^{2}}{\rho }}\right ]+\mathbf {u} _{\theta }\left[{\frac {2}{\rho }}v_{\rho }v_{\theta }+\rho {\frac {\mathrm {d} }{ \mathrm {d} t}}{\frac {v_{\theta }}{\rho }}\right]\,.\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4bd23fad91b9a145bc62e918b5124ee62c4a537b)
![{\displaystyle \mathbf {a} =\mathbf {u} _{\rho }\left[-\rho \left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}\right]+\mathbf {u} _{\theta }\left[\rho {\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\right]=\mathbf {u} _{\rho }\left[-{\frac {v^{2}}{r}}\right]+\mathbf {u} _{\theta }\left[{\frac {\mathrm {d} v}{\mathrm {d} t}}\right]\ }](https://wikimedia.org/api/rest_v1/media/math/render/svg/df2f314be17d32d8d204bef757376219863181c7)










![{\displaystyle \mathbf {r} (s)=\left[x(s),\ y(s)\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ea9cb4aedaa6696cd195a0329b20a3a6d4c1f0d0)
![{\displaystyle \mathrm {d} \mathbf {r} (s)=\left[\mathrm {d} x(s),\ \mathrm {d} y(s)\right]=\left[x'(s),\ y'(s)\right]\mathrm {d} s\ ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e41305b24920b77bceb3d266edba4ab08249618)
![{\displaystyle \left[x'(s)^{2}+y'(s)^{2}\right]=1\ .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50c42e82eda34ce15d98149c930dfb7ba7cec77d)
![{\displaystyle \mathbf {u} _{\mathrm {t} }(s)=\left[x'(s),\ y'(s)\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a7fe41893b23da5d10fa21095cbf823374b339)
![{\displaystyle \mathbf {u} _{\mathrm {n} }(s)=\left[y'(s),\ -x'(s)\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aefd42926b0e6c5fd1cdd0b91ae514b65fd3dfc0)







![{\displaystyle {\begin{aligned}\mathbf {a} (s)&={\frac {\mathrm {d} }{\mathrm {d} t}}\mathbf {v} (s)={\frac {\mathrm {d} }{\mathrm {d} t}}\left[{\frac {\mathrm {d} s}{\mathrm {d} t}}\left(x'(s),\ y'(s)\right)\right]\\&=\left({\frac {\mathrm {d} ^{2}s}{\mathrm {d} t^{2}}}\right)\mathbf {u} _{\mathrm {t} }(s)+\left({\frac {\mathrm {d} s}{\mathrm {d} t}}\right)^{2}\left(x''(s),\ y''(s)\right)\\&=\left({\frac {\mathrm {d} ^{2}s}{\mathrm {d} t^{2}}}\right)\mathbf {u} _{\mathrm {t} }(s)-\left({\frac {\mathrm {d} s}{\mathrm {d} t}}\right)^{2}{\frac {1}{\rho }}\mathbf {u} _{\mathrm {n} }(s)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5b63aca630aacb31a8ef0fc21bcf2f8e86af3ca)





![{\displaystyle \mathbf {u} _{\mathrm {t} }(s)=\left[-\sin {\frac {s}{\alpha }}\ ,\ \cos {\frac {s}{\alpha }}\right]\ ;\ \mathbf {u} _{\mathrm {n} }(s)=\left[\cos {\frac {s}{\alpha }}\ ,\ \sin {\frac {s}{\alpha }}\right]\ ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/72b1a6646bfe5026f496df581576f09251db1a9c)
![{\displaystyle {\frac {\mathrm {d} }{\mathrm {d} s}}\mathbf {u} _{\mathrm {t} }(s)=-{\frac {1}{\alpha }}\left[\cos {\frac {s}{\alpha }}\ ,\ \sin {\frac {s}{\alpha }}\right]=-{\frac {1}{\alpha }}\mathbf {u} _{\mathrm {n} }(s)\ ;}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d6d3efccbed76c27507654645897ccc0b587b08)
![{\displaystyle \ {\frac {\mathrm {d} }{\mathrm {d} s}}\mathbf {u} _{\mathrm {n} }(s)={\frac {1}{\alpha }}\left[-\sin {\frac {s}{\alpha }}\ ,\ \cos {\frac {s}{\alpha }}\right]={\frac {1}{\alpha }}\mathbf {u} _{\mathrm {t} }(s)\ .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/29f755d9d1bb8f6f884a3bdc8ae8d1be5147674a)



