Volante de inercia
En mecánica, un volante de inercia o volante motor es un elemento totalmente pasivo que únicamente aporta al sistema una inercia adicional de modo que le permite almacenar energía cinética.
Este volante continúa su movimiento por inercia cuando cesa el par motor que lo propulsa.
Así se consiguen reducir las fluctuaciones de velocidad angular.
Se encuentra en el extremo del cigüeñal más próximo a la caja de cambios, unido al embrague.
Y se encarga de transmitir el movimiento del motor a la caja de cambios y posteriormente a las ruedas.
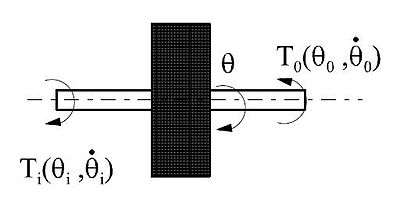
como negativo, obtendremos la siguiente ecuación para el movimiento del volante: o lo que es lo mismo, Es decir, una ecuación diferencial de segundo orden que podemos resolver aplicando las técnicas apropiadas (tanto para ecuaciones diferenciales lineales como no lineales) una vez conocidas las funciones de variación de los momentos de torsión de entrada y salida.
En un análisis menos exhaustivo del sistema formado por el volante, podríamos suponer que el eje es rígido a torsión y en consecuencia tomar: por consiguiente la ecuación anterior quedaría simplificada del siguiente modo:
No obstante, en la práctica no resulta de gran interés conocer los valores instantáneos de las variables cinemáticas, sino que la atención se centra fundamentalmente en conocer el comportamiento global del volante de inercia.
¿cuáles son las características del funcionamiento resultante del sistema?Trataremos ahora de abordar dichas cuestiones de una situación hipotética que nos ayude a profundizar en el tema, para ello centremos primeramente nuestra atención en el siguiente diagrama: Vamos a describir paso por paso la interpretación que se debe realizar del diagrama anterior: Para el caso hipotético estudiado, la energía transmitida al volante (trabajo entrante) es cuantitativamente equivalente al área del rectángulo delimitado por
, o sea: Si suponemos el sistema estudiado como uno de propiedades ideales en el cual no exista fricción, léase que no se producen pérdidas asociadas a dicho fenómeno, podemos entonces detallar las tres situaciones posibles que pueden darse: Si estudiamos el caso hipotético bajo el prisma de las energías cinéticas planteando un balance para las mismas, obtenemos un análisis igualmente válido en el cual podemos apreciar: Es necesario ahora que se ha explicado este ejemplo sencillo poner de manifiesto que la mayoría de las funciones de "momento de torsión (par motor) - desplazamiento" que nos encontramos en la vida real y por tanto en las aplicaciones ingenieriles, son de una dificultad extrema y por tanto deben ser integradas por métodos numéricos aproximados.
Existen diversos algoritmos de integración que podemos utilizar para calcular dichas aproximaciones, entre las más típicas se encuentra la regla de Simpson que destaca por su sencillez (implementada en muchas calculadoras programables) y la regla trapezoidal.
para obtener una relación adimensional que depende más de las propiedades del sistema que de la velocidad misma.
Esto se debe a que tanto la energía que nos hará falta como las revoluciones a las cuales girará el rotor son datos conocidos y por tanto lo que debemos determinar es el compromiso entre el coeficiente de fluctuación de velocidad y la inercia de modo que no se sufran grandes fluctuacoones ni por el contrario sea muy costoso llegar al régimen de trabajo (lo que impondría una gran inercia).
La cantidad de energía que puede ser almacenada de manera segura en el rotor dependerá del punto en el cual el rotor comienza a combarse o resquebrajarse.
Para un diseño de volante de inercia dado, se puede deducir de las ecuaciones expuestas arriba que la energía cinética es proporcional al cociente entre la tensión circunferencial y la densidad del material: Este parámetro puede ser llamado resistencia específica a la tracción o tenacidad específica.
Aquel material que posea la mayor tenacidad específica dará lugar al volante de inercia capaz de acumular mayor energía.
Las diferentes fases de los ciclos motores no tienen la misma importancia en cuanto a la producción de energía; además el mecanismo biela-manivela no garantiza un par constante.
Por lo general el volante consiste en una rueda o un disco, de fundición o de acero, calado en el árbol motor, y cuyas dimensiones están calculadas de acuerdo con las características generales del sistema del que forma parte.