Graphics Core Next (microarquitectura)
[3] GCN requiere considerablemente más transistores que TeraScale, pero ofrece ventajas para el cálculo de GPU de propósito general (GPGPU) debido a un compilador más simple.
Entre otras tareas, se encarga del manejo de shaders asíncronos.
Desde la tercera iteración de GCN, el hardware contiene dos planificadores: uno para programar "wavefronts" durante la ejecución del sombreador (Cu Scheduler o Compute Unit Scheduler) y el otro para programar la ejecución de dibujar y calcular colas.
Para un sombreador determinado, los controladores de la GPU también pueden programar instrucciones en la CPU para minimizar la latencia.
Esto no debe confundirse con otros programadores de hardware o software.
Un shader es un pequeño programa escrito en GLSL que realiza el procesamiento de gráficos, y un kernel es un pequeño programa escrito en OpenCL que realiza el procesamiento GPGPU.
AMD y Nvidia eligieron enfoques similares para ocultar esta latencia inevitable: la agrupación de múltiples hilos.
Tenga en cuenta que, junto con las instrucciones SSE, este concepto del nivel más básico de paralelismo a menudo se denomina "ancho de vector".
El ancho del vector se caracteriza por el número total de bits que contiene.
VCE 4.0 era parte de la arquitectura Vega y posteriormente fue reemplazado por Video Core Next.
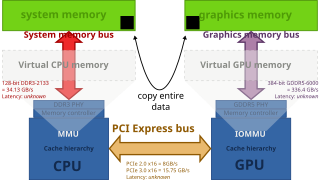
En una vista previa en 2011, AnandTech escribió sobre la memoria virtual unificada, compatible con Graphics Core Next.
[20] Esta primera implementación se centra en una sola APU "Kaveri" y funciona junto con el controlador de gráficos del kernel Radeon (kgd) existente.
Los planificadores de hardware se utilizan para realizar la programación[21] y descargar la asignación de colas de cómputo a las ACE desde el controlador al hardware, almacenando en búfer estas colas hasta que haya al menos una cola vacía en al menos una ACE.
programado para acaparar la GPU tanto como sea posible mientras permite que otras tareas usen los recursos que las tareas de alta prioridad no están usando.
[24] Esta unidad se introdujo con la microarquitectura GCN de cuarta generación.
[24] La microarquitectura GCN 1 se utilizó en varias tarjetas gráficas de la serie Radeon HD 7000.
GPU discretas (familia de Southern Islands): La segunda generación de GCN se introdujo con Radeon HD 7790 y también se encuentra en Radeon HD 8770, R7 260/260X, R9 290/290X, R9 295X2, R7 360 y R9 390/390X, así como en Steamroller.
La segunda generación de GCN introdujo una entidad llamada "Shader Engine" (SE).
[30] En AMD Developer Summit (APU) en noviembre de 2013, Michael Mantor presentó la Radeon R9 290X.
[33] Sin embargo, su rendimiento de doble precisión es peor en comparación con la generación anterior.
El motor 3D (es decir, GCA (matriz de gráficos y cómputo) o GFX) es idéntica a la que se encuentra en los chips Tonga.
GPU discretas:[39] Además de las GPU dedicadas, Polaris se utiliza en las APU de PlayStation 4 Pro y Xbox One X, denominadas "Neo" y "Scorpio", respectivamente.
En enero, AnandTech asumió que Vega finalmente se pondría al día con Nvidia con respecto a las optimizaciones de eficiencia energética debido al nuevo "DSBR (Draw Stream Binning Rasterizer)" que se presentará con Vega.
Curacao Neptune Trinidad Heathrow Venus Tropo Opal Litho Jet Exo Banks Tobago Strato Emerald Grenada Weston Polaris 24 Antigua Polaris 30 1 Los nombres de código antiguos como Treasure (Lexa) o Hawaii Refresh (Ellesmere) no se incluyen en la lista.