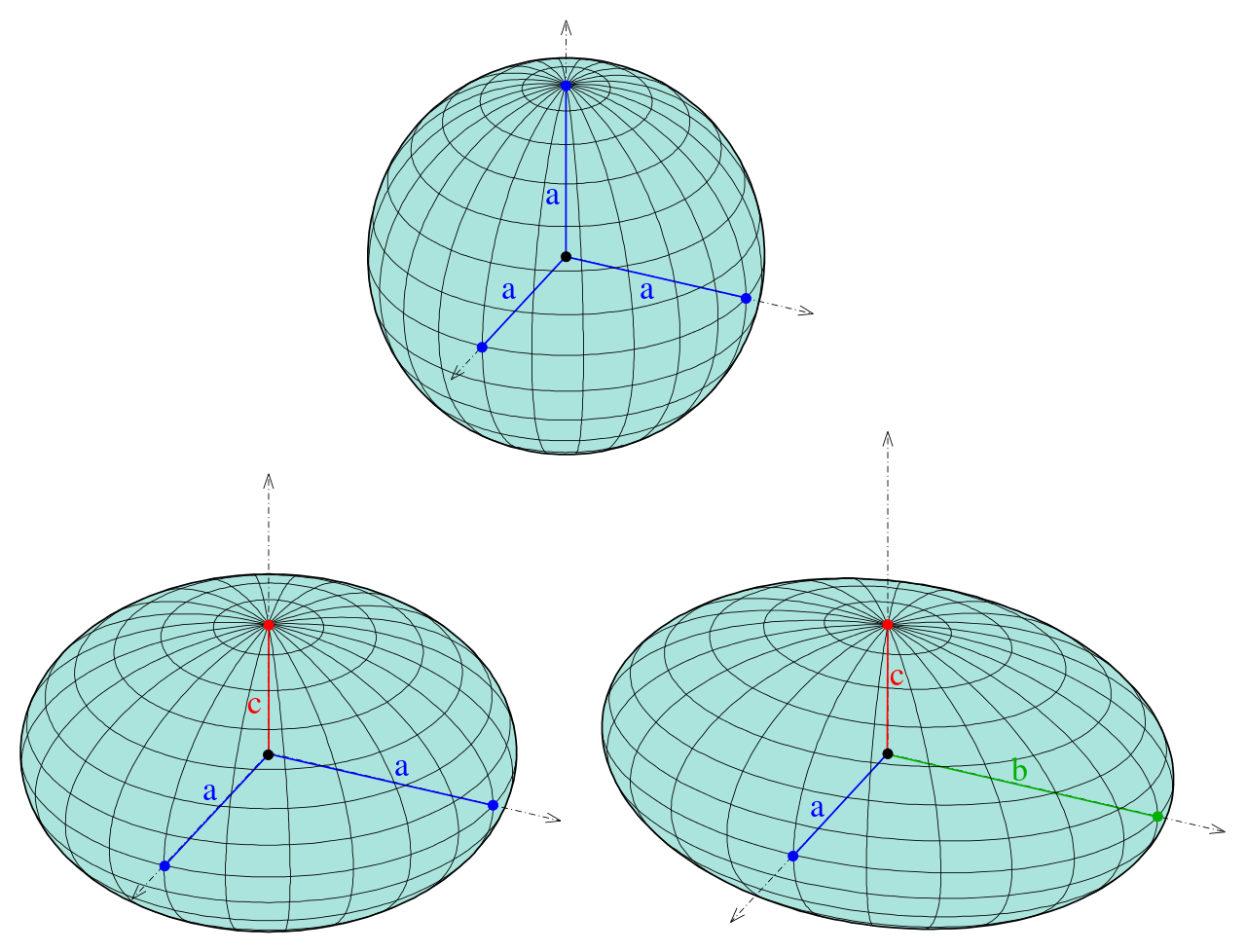
Esferoide , a = b = 5 , c = 3 , abajo a la izquierda ;
Elipsoide triaxial , a = 4,5 , b = 6 ; c = 3 , abajo a la derecha
Un elipsoide es una superficie que puede obtenerse a partir de una esfera deformándola mediante escalados direccionales , o más generalmente, de una transformación afín .
Un elipsoide es una superficie cuadrática , es decir, una superficie que puede definirse como el conjunto cero de un polinomio de grado dos en tres variables. Entre las superficies cuadráticas, un elipsoide se caracteriza por cualquiera de las dos propiedades siguientes. Toda sección transversal plana es una elipse , o está vacía, o se reduce a un único punto (esto explica el nombre, que significa "similar a una elipse"). Está acotada , lo que significa que puede estar encerrada en una esfera suficientemente grande.
Un elipsoide tiene tres ejes de simetría perpendiculares entre sí que se intersecan en un centro de simetría , llamado centro del elipsoide. Los segmentos de línea que están delimitados en los ejes de simetría por el elipsoide se denominan ejes principales o, simplemente, ejes del elipsoide. Si los tres ejes tienen longitudes diferentes, la figura es un elipsoide triaxial (raramente un elipsoide escaleno ) y los ejes están definidos de forma única.
Si dos de los ejes tienen la misma longitud, entonces el elipsoide es un elipsoide de revolución , también llamado esferoide . En este caso, el elipsoide es invariante bajo una rotación alrededor del tercer eje, y hay, por lo tanto, infinitas maneras de elegir los dos ejes perpendiculares de la misma longitud. Si el tercer eje es más corto, el elipsoide es un esferoide achatado ; si es más largo, es un esferoide alargado . Si los tres ejes tienen la misma longitud, el elipsoide es una esfera.
Ecuación estándar
El elipsoide general, también conocido como elipsoide triaxial, es una superficie cuadrática que se define en coordenadas cartesianas como:
donde , y son las longitudes de los semiejes.
Los puntos , y se encuentran en la superficie. Los segmentos de línea que van desde el origen hasta estos puntos se denominan semiejes principales del elipsoide, porque a , b , c son la mitad de la longitud de los ejes principales. Corresponden al semieje mayor y al semieje menor de una elipse .
El elipsoide se puede parametrizar de varias maneras, que son más sencillas de expresar cuando los ejes del elipsoide coinciden con los ejes de coordenadas. Una opción común es
dónde
Estos parámetros pueden interpretarse como coordenadas esféricas , donde θ es el ángulo polar y φ es el ángulo acimutal del punto ( x , y , z ) del elipsoide. [1]
Midiendo desde el ecuador en lugar de desde un polo,
Medición de ángulos directamente sobre la superficie del elipsoide, no sobre la esfera circunscrita.
dónde
γ sería la latitud geocéntrica en la Tierra y λ la longitud. Se trata de coordenadas esféricas verdaderas cuyo origen está en el centro del elipsoide. [ cita requerida ]
En geodesia , la latitud geodésica se utiliza con mayor frecuencia como el ángulo entre el plano vertical y el ecuatorial, definido para un elipsoide biaxial. Para un elipsoide triaxial más general, véase latitud elipsoidal .
En términos de los diámetros principales A , B , C (donde A = 2 a , B = 2 b , C = 2 c ), el volumen es
.
Esta ecuación se reduce a la del volumen de una esfera cuando los tres radios elípticos son iguales, y a la de un esferoide achatado o prolado cuando dos de ellos son iguales.
y donde F ( φ , k ) y E ( φ , k ) son integrales elípticas incompletas de primer y segundo tipo respectivamente. [3]
El área de superficie de este elipsoide general también se puede expresar en términos de , una de las formas simétricas de Carlson de integrales elípticas: [4]
Simplificando la fórmula anterior utilizando las propiedades de R G , [5] esto también se puede expresar en términos del volumen del elipsoide V :
A diferencia de la expresión con F ( φ , k ) y E ( φ , k ) , las ecuaciones en términos de R G no dependen de la elección de un orden en a , b y c .
El área de la superficie de un elipsoide de revolución (o esferoide) puede expresarse en términos de funciones elementales :
o
o
y
que, como se desprende de las identidades trigonométricas básicas, son expresiones equivalentes (es decir, la fórmula para S oblato se puede utilizar para calcular el área de superficie de un elipsoide alargado y viceversa). En ambos casos, e puede identificarse nuevamente como la excentricidad de la elipse formada por la sección transversal a través del eje de simetría. (Véase elipse ). Se pueden encontrar derivaciones de estos resultados en fuentes estándar, por ejemplo Mathworld . [6]
Fórmula aproximada
Aquí p ≈ 1,6075 produce un error relativo de como máximo 1,061%; [7] un valor de p = 8/5 = 1,6 es óptimo para elipsoides casi esféricos, con un error relativo de como máximo 1,178%.
En el límite "plano" de c mucho más pequeño que a y b , el área es aproximadamente 2π ab , equivalente a p = log 2 3 ≈ 1.5849625007 .
Secciones del plano
Sección plana de un elipsoide
La intersección de un plano y una esfera es un círculo (o se reduce a un único punto, o está vacía). Cualquier elipsoide es la imagen de la esfera unitaria bajo alguna transformación afín, y cualquier plano es la imagen de algún otro plano bajo la misma transformación. Por lo tanto, debido a que las transformaciones afines asignan círculos a elipses, la intersección de un plano con un elipsoide es una elipse o un único punto, o está vacía. [8] Obviamente, los esferoides contienen círculos. Esto también es cierto, pero menos obvio, para los elipsoides triaxiales (ver la sección Circular ).
Determinación de la elipse de una sección plana
Sección plana de un elipsoide (ver ejemplo)
Dado: Elipsoide x2/un 2 + y 2/el segundo 2 + el 2/c2 = 1 y el plano con ecuación n x x + n y y + n z z = d , que tienen una elipse en común.
Se buscan: Tres vectores f 0 (centro) y f 1 , f 2 (vectores conjugados), tales que la elipse pueda representarse mediante la ecuación paramétrica
Solución: La escala u = incógnita/a , v = y/b , w = el/do transforma el elipsoide en la esfera unitaria u 2 + v 2 + w 2 = 1 y el plano dado en el plano con ecuación
Donde m w = ±1 (es decir, el plano es horizontal), sea
Donde m w ≠ ±1 , sea
En cualquier caso, los vectores e 1 , e 2 son ortogonales, paralelos al plano de intersección y tienen longitud ρ (radio del círculo). Por lo tanto, el círculo de intersección puede describirse mediante la ecuación paramétrica
La escala inversa (ver arriba) transforma la esfera unitaria nuevamente en el elipsoide y los vectores e 0 , e 1 , e 2 se asignan a los vectores f 0 , f 1 , f 2 , que se deseaban para la representación paramétrica de la elipse de intersección.
En elipse se describe cómo encontrar los vértices y semiejes de la elipse .
Ejemplo: Los diagramas muestran un elipsoide con los semiejes a = 4, b = 5, c = 3 que es cortado por el plano x + y + z = 5 .
Construcción con clavijas y cuerdas
Construcción de una elipse con clavijas y cuerdas: | S 1 S 2 | , longitud de la cuerda (roja)Construcción con clavijas y cuerdas de un elipsoide, azul: cónicas focalesDeterminación del semieje del elipsoide
La construcción con alfileres y cuerdas de un elipsoide es una transferencia de la idea de construir una elipse utilizando dos alfileres y una cuerda (ver diagrama).
Una construcción con clavijas y cuerdas de un elipsoide de revolución está dada por la construcción con clavijas y cuerdas de la elipse rotada.
La construcción de puntos de un elipsoide triaxial es más complicada. Las primeras ideas se deben al físico escocés JC Maxwell (1868). [9] Las principales investigaciones y la extensión a las cuádricas fueron realizadas por el matemático alemán O. Staude en 1882, 1886 y 1898. [10] [11] [12] La descripción de la construcción de elipsoides e hiperboloides con clavijas y cuerdas también está contenida en el libro Geometry and the fantasy escrito por D. Hilbert y S. Vossen, [13] .
Pasos de la construcción
Elija una elipse E y una hipérbola H , que son un par de cónicas focales : con los vértices y focos de la elipse y una cuerda (en el diagrama rojo) de longitud l .
Fije un extremo de la cuerda al vértice S 1 y el otro al foco F 2 . La cuerda se mantiene tensa en un punto P con coordenadas y y z positivas , de modo que la cuerda corre desde S 1 a P detrás de la parte superior de la hipérbola (ver diagrama) y es libre de deslizarse sobre la hipérbola. La parte de la cuerda desde P a F 2 corre y se desliza frente a la elipse. La cuerda pasa por ese punto de la hipérbola, para el cual la distancia | S 1 P | sobre cualquier punto de la hipérbola es mínima. La afirmación análoga sobre la segunda parte de la cuerda y la elipse también tiene que ser verdadera.
Entonces: P es un punto del elipsoide con ecuación
Los puntos restantes del elipsoide se pueden construir mediante cambios adecuados de la cuerda en las cónicas focales.
Semiejes
Las ecuaciones para los semiejes del elipsoide generado se pueden derivar mediante elecciones especiales para el punto P :
La parte inferior del diagrama muestra que F 1 y F 2 también son los focos de la elipse en el plano xy . Por lo tanto, es confocal a la elipse dada y la longitud de la cuerda es l = 2 r x + ( a − c ) . Resolviendo r x se obtiene r x = 1/2 ( l − a + c ) ; además r2 años= r2x -c 2 .
Del diagrama superior vemos que S 1 y S 2 son los focos de la sección elipse del elipsoide en el plano xz y que r2z = r2x - un 2 .
Conversar
Si, por el contrario, un elipsoide triaxial se da mediante su ecuación, entonces a partir de las ecuaciones del paso 3 se pueden derivar los parámetros a , b , l para una construcción de clavijas y cuerdas.
Elipsoides confocales
Si E es un elipsoide confocal a E con los cuadrados de sus semiejes
Luego de las ecuaciones de E
Se encuentra que las cónicas focales correspondientes utilizadas para la construcción de clavijas y cuerdas tienen los mismos semiejes a , b , c que el elipsoide E. Por lo tanto (de manera análoga a los focos de una elipse) se consideran las cónicas focales de un elipsoide triaxial como los (infinitos) focos y se los llama curvas focales del elipsoide. [14]
La afirmación inversa también es cierta: si uno elige una segunda cadena de longitud l y define
entonces las ecuaciones
son válidos, lo que significa que los dos elipsoides son confocales.
Caso límite, elipsoide de revolución
En el caso de a = c (un esferoide ) se obtiene S 1 = F 1 y S 2 = F 2 , lo que significa que la elipse focal degenera en un segmento de línea y la hipérbola focal colapsa en dos segmentos de línea infinitos en el eje x . El elipsoide es rotacionalmente simétrico alrededor del eje x y
.
Propiedades de la hipérbola focal
Arriba: Elipsoide de 3 ejes con su hipérbola focal. Abajo: Proyección paralela y central del elipsoide de manera que parezca una esfera, es decir, su forma aparente es un círculo.
Curva verdadera
Si se observa un elipsoide desde un punto externo V de su hipérbola focal, entonces parece ser una esfera, es decir, su forma aparente es un círculo. Equivalentemente, las tangentes del elipsoide que contiene el punto V son las líneas de un cono circular , cuyo eje de rotación es la línea tangente de la hipérbola en V. [15] [16] Si se permite que el centro V desaparezca en el infinito, se obtiene una proyección paralela ortogonal con la asíntota correspondiente de la hipérbola focal como su dirección. La verdadera curva de forma (puntos tangentes) en el elipsoide no es un círculo.La parte inferior del diagrama muestra a la izquierda una proyección paralela de un elipsoide (con semiejes 60, 40, 30) a lo largo de una asíntota y a la derecha una proyección central con centro V y punto principal H sobre la tangente de la hipérbola en el punto V. ( H es el pie de la perpendicular desde V al plano imagen.) Para ambas proyecciones la forma aparente es un círculo. En el caso paralelo la imagen del origen O es el centro del círculo; en el caso central el punto principal H es el centro.
Puntos umbilicales
La hipérbola focal intersecta el elipsoide en sus cuatro puntos umbilicales . [17]
Propiedad de la elipse focal
La elipse focal junto con su parte interior puede considerarse como la superficie límite (un elipsoide infinitamente delgado) del lápiz de elipsoides confocales determinado por a , b para r z → 0 . Para el caso límite se obtiene
Elipsoides en dimensiones superiores y posición general
También se puede definir un hiperelipsoide como la imagen de una esfera bajo una transformación afín invertible . El teorema espectral se puede utilizar nuevamente para obtener una ecuación estándar de la forma
El volumen de un hiperelipsoide n -dimensional se puede obtener reemplazando R n por el producto de los semiejes a 1 a 2 ... a n en la fórmula para el volumen de una hiperesfera :
Si A es una matriz real, simétrica, n por n, definida positiva , y v es un vector en entonces el conjunto de puntos x que satisfacen la ecuación
es un elipsoide n -dimensional centrado en v . La expresión también se denomina norma elipsoidal de x - v . Para cada elipsoide, existen A y v únicos que satisfacen la ecuación anterior. [18] : 67
Los vectores propios de A son los ejes principales del elipsoide, y los valores propios de A son los recíprocos de los cuadrados de los semiejes (en tres dimensiones estos son a −2 , b −2 y c −2 ). [19] En particular:
El diámetro del elipsoide es el doble del semieje más largo, que es el doble de la raíz cuadrada del recíproco del valor propio más grande de A.
El ancho del elipsoide es el doble del semieje más corto, que es el doble de la raíz cuadrada del recíproco del valor propio más pequeño de A.
Una transformación lineal invertible aplicada a una esfera produce un elipsoide, que puede llevarse a la forma estándar anterior mediante una rotación adecuada , una consecuencia de la descomposición polar (también, ver teorema espectral ). Si la transformación lineal está representada por una matriz simétrica de 3 × 3 , entonces los vectores propios de la matriz son ortogonales (debido al teorema espectral ) y representan las direcciones de los ejes del elipsoide; las longitudes de los semiejes se calculan a partir de los valores propios. La descomposición en valores singulares y la descomposición polar son descomposiciones matriciales estrechamente relacionadas con estas observaciones geométricas.
Para cada matriz definida positiva , existe una única matriz definida positiva denotada A 1/2 , de modo que esta notación está motivada por el hecho de que esta matriz puede verse como la "raíz cuadrada positiva" de El elipsoide definido por también puede presentarse como [18] : 67
La clave para una representación paramétrica de un elipsoide en posición general es la definición alternativa:
Un elipsoide es una imagen afín de la esfera unitaria.
Una transformación afín se puede representar mediante una traslación con un vector f 0 y una matriz regular 3 × 3 A :
donde f 1 , f 2 , f 3 son los vectores columna de la matriz A .
Una representación paramétrica de un elipsoide en posición general se puede obtener mediante la representación paramétrica de una esfera unitaria (ver arriba) y una transformación afín:
.
Si los vectores f 1 , f 2 , f 3 forman un sistema ortogonal, los seis puntos con vectores f 0 ± f 1,2,3 son los vértices del elipsoide y | f 1 |, | f 2 |, | f 3 | son los ejes semiprincipales.
Un vector normal a la superficie en el punto x ( θ , φ ) es
Para cualquier elipsoide existe una representación implícita F ( x , y , z ) = 0 . Si para simplificar el centro del elipsoide es el origen, f 0 = 0 , la siguiente ecuación describe el elipsoide anterior: [20]
Aplicaciones
La forma elipsoidal encuentra muchas aplicaciones prácticas:
Las mediciones obtenidas a partir de imágenes de resonancia magnética de la próstata se pueden utilizar para determinar el volumen de la glándula utilizando la aproximación L × W × H × 0,52 (donde 0,52 es una aproximación para π/6 ) [21]
Los elipsoides y cuboides rotan de manera estable a lo largo de sus ejes mayor o menor, pero no a lo largo de su eje medio. Esto se puede ver experimentalmente al lanzar una goma de borrar con algo de giro. Además, las consideraciones del momento de inercia significan que la rotación a lo largo del eje mayor se altera más fácilmente que la rotación a lo largo del eje menor. [22]
Un efecto práctico de esto es que los cuerpos astronómicos escalenos como Haumea generalmente rotan a lo largo de sus ejes menores (al igual que la Tierra, que es meramente achatada ); además, debido al bloqueo de mareas , las lunas en órbita sincrónica como Mimas orbitan con su eje mayor alineado radialmente a su planeta.
El elipsoide es la forma más general para la que ha sido posible calcular el flujo de fluido alrededor de la forma sólida. Los cálculos incluyen la fuerza necesaria para trasladarse a través de un fluido y rotar dentro de él. Las aplicaciones incluyen la determinación del tamaño y la forma de moléculas grandes, la velocidad de hundimiento de partículas pequeñas y las capacidades de natación de los microorganismos . [23]
donde k es un factor de escala, x es un vector fila aleatorio n -dimensional con vector mediana μ (que también es el vector medio si este último existe), Σ es una matriz definida positiva que es proporcional a la matriz de covarianza si esta última existe, y g es una función que mapea de los reales no negativos a los reales no negativos dando un área finita bajo la curva. [24] La distribución normal multivariante es el caso especial en el que g ( z ) = exp(− el/2 ) para la forma cuadrática z .
Por lo tanto, la función de densidad es una transformación escalar a escalar de una expresión cuadrática. Además, la ecuación para cualquier superficie de isodensidad establece que la expresión cuadrática es igual a una constante específica de ese valor de la densidad, y la superficie de isodensidad es un elipsoide.
El aplanamiento , también llamado elipticidad y oblatidad , es una medida de la compresión de un círculo o esfera a lo largo de un diámetro para formar una elipse o un elipsoide de revolución (esferoide), respectivamente.
Focaloide , una concha delimitada por dos elipsoides concéntricos y confocales
^ FWJ Olver, DW Lozier, RF Boisvert y CW Clark, editores, 2010, NIST Handbook of Mathematical Functions ( Cambridge University Press ), Sección 19.33 "Elipsoides triaxiales" . Consultado el 8 de enero de 2012 .
^ "DLMF: 19.2 Definiciones".
^ "Área de superficie de un elipsoide". analyticphysics.com . Consultado el 23 de julio de 2024 .
^ "DLMF: §19.20 Casos especiales ‣ Integrales simétricas ‣ Capítulo 19 Integrales elípticas". dlmf.nist.gov . Consultado el 23 de julio de 2024 .
^ W., Weisstein, Eric. "Esferoide prolato". mathworld.wolfram.com . Archivado desde el original el 3 de agosto de 2017 . Consultado el 25 de marzo de 2018 .{{cite web}}: CS1 maint: multiple names: authors list (link)
^ Respuestas finales Archivado el 30 de septiembre de 2011 en Wayback Machine por Gerard P. Michon (13 de mayo de 2004). Véanse las fórmulas de Thomsen y los comentarios de Cantrell.
^ Albert, Abraham Adrian (2016) [1949], Geometría analítica sólida , Dover, pág. 117, ISBN978-0-486-81026-3
^ W. Böhm: Die FadenKonstruktion der Flächen zweiter Ordnung , Mathemat. Nachrichten 13, 1955, pág. 151
^ "Copia archivada" (PDF) . Archivado (PDF) desde el original el 26 de junio de 2013 . Consultado el 12 de octubre de 2013 .{{cite web}}: CS1 maint: archived copy as title (link)págs. 17–18.
^ Computerunterstützte Darstellende und Konstruktive Geometrie. Archivado el 10 de noviembre de 2013 en Wayback Machine Uni Darmstadt (PDF; 3,4 MB), pág. 88.
^ Bezinque, Adam; et al. (2018). "Determinación del volumen de la próstata: una comparación de métodos contemporáneos". Academic Radiology . 25 (12): 1582–1587. doi :10.1016/j.acra.2018.03.014. PMID 29609953. S2CID 4621745.





























![{\displaystyle {\begin{aligned}R={}&{\frac {abc}{\sqrt {c^{2}\left(b^{2}\cos ^{2}\lambda +a^{2 }\sin ^{2}\lambda \right)\cos ^{2}\gamma +a^{2}b^{2}\sin ^{2}\gamma }}},\\[3pt]&- {\tfrac {\pi }{2}}\leq \gamma \leq {\tfrac {\pi }{2}},\qquad 0\leq \lambda <2\pi .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e87a3593c5b92d0d0a7a0f78bf98a9c69fb9f9b4)












![{\displaystyle S\approx 4\pi {\sqrt[{p}]{\frac {a^{p}b^{p}+a^{p}c^{p}+b^{p}c^{p}}{3}}}.\,\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a3ba7c5165e42013df15a6129b6c703ac3a57416)


































![{\displaystyle {\begin{aligned}I_{\mathrm {xx}}&={\tfrac {1}{5}}m\left(b^{2}+c^{2}\right),&I_{\mathrm {yy}}&={\tfrac {1}{5}}m\left(c^{2}+a^{2}\right),&I_{\mathrm {zz}}&={\tfrac {1}{5}}m\left(a^{2}+b^{2}\right),\\[3pt]I_{\mathrm {xy}}&=I_{\mathrm {yz}}=I_{\mathrm {zx}}=0.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/abb475e7f50c8328a61ba8c81e5ee9ed5c77a321)
