Rama de la física que describe el movimiento de los objetos sin considerar fuerzas.
La cinemática es un subcampo de la física y las matemáticas , desarrollado en la mecánica clásica , que describe el movimiento de puntos, cuerpos (objetos) y sistemas de cuerpos (grupos de objetos) sin considerar las fuerzas que los provocan. [1] [2] [3] La cinemática, como campo de estudio, a menudo se conoce como la "geometría del movimiento" y ocasionalmente se la ve como una rama de las matemáticas puras y aplicadas , ya que puede estudiarse sin considerar la masa. de un cuerpo o de las fuerzas que actúan sobre él. [4] [5] [6] Un problema de cinemática comienza describiendo la geometría del sistema y declarando las condiciones iniciales de cualquier valor conocido de posición, velocidad y/o aceleración de puntos dentro del sistema. Luego, utilizando argumentos de la geometría, se puede determinar la posición, velocidad y aceleración de cualquier parte desconocida del sistema. El estudio de cómo actúan las fuerzas sobre los cuerpos entra dentro de la cinética , no de la cinemática. Para más detalles, ver dinámica analítica .
Las transformaciones geométricas, también llamadas transformaciones rígidas , se utilizan para describir el movimiento de componentes en un sistema mecánico , simplificando la derivación de las ecuaciones de movimiento. También son fundamentales para el análisis dinámico .
El término cinemático es la versión inglesa de la cinématique de AM Ampère , [9] que construyó a partir del griego κίνημα kinema ("movimiento, movimiento"), derivado a su vez de κινεῖν kinein ("moverse"). [10] [11]
Cinemática y cinématique están relacionadas con la palabra francesa cinéma, pero ninguna se deriva directamente de ella. Sin embargo, comparten una raíz en común, ya que cinéma proviene de la forma abreviada de cinématographe, "proyector de películas y cámara", una vez más de la palabra griega para movimiento y del griego γρᾰ́φω grapho ("escribir"). [12]
Cinemática de la trayectoria de una partícula en un sistema de referencia no giratorio.
Cantidades cinemáticas de una partícula clásica: masa m , posición r , velocidad v , aceleración a .
Vectores cinemáticos en coordenadas polares planas. Observe que la configuración no se limita al espacio bidimensional, sino a un plano en cualquier dimensión superior.
La cinemática de partículas es el estudio de la trayectoria de las partículas. La posición de una partícula se define como el vector de coordenadas desde el origen de un sistema de coordenadas hasta la partícula. Por ejemplo, considere una torre a 50 m al sur de su casa, donde el marco de coordenadas está centrado en su casa, de modo que el este está en la dirección del eje x y el norte está en la dirección del eje y , entonces la coordenada El vector a la base de la torre es r = (0 m, −50 m, 0 m). Si la torre tiene 50 m de altura y esta altura se mide a lo largo del eje z , entonces el vector de coordenadas hasta la cima de la torre es r = (0 m, −50 m, 50 m).
En el caso más general, se utiliza un sistema de coordenadas tridimensional para definir la posición de una partícula. Sin embargo, si la partícula está obligada a moverse dentro de un plano, un sistema de coordenadas bidimensional es suficiente. Todas las observaciones en física están incompletas si no se describen con respecto a un sistema de referencia.
El vector de posición de una partícula es un vector dibujado desde el origen del sistema de referencia hasta la partícula. Expresa tanto la distancia del punto desde el origen como su dirección desde el origen. En tres dimensiones, el vector de posición se puede expresar como
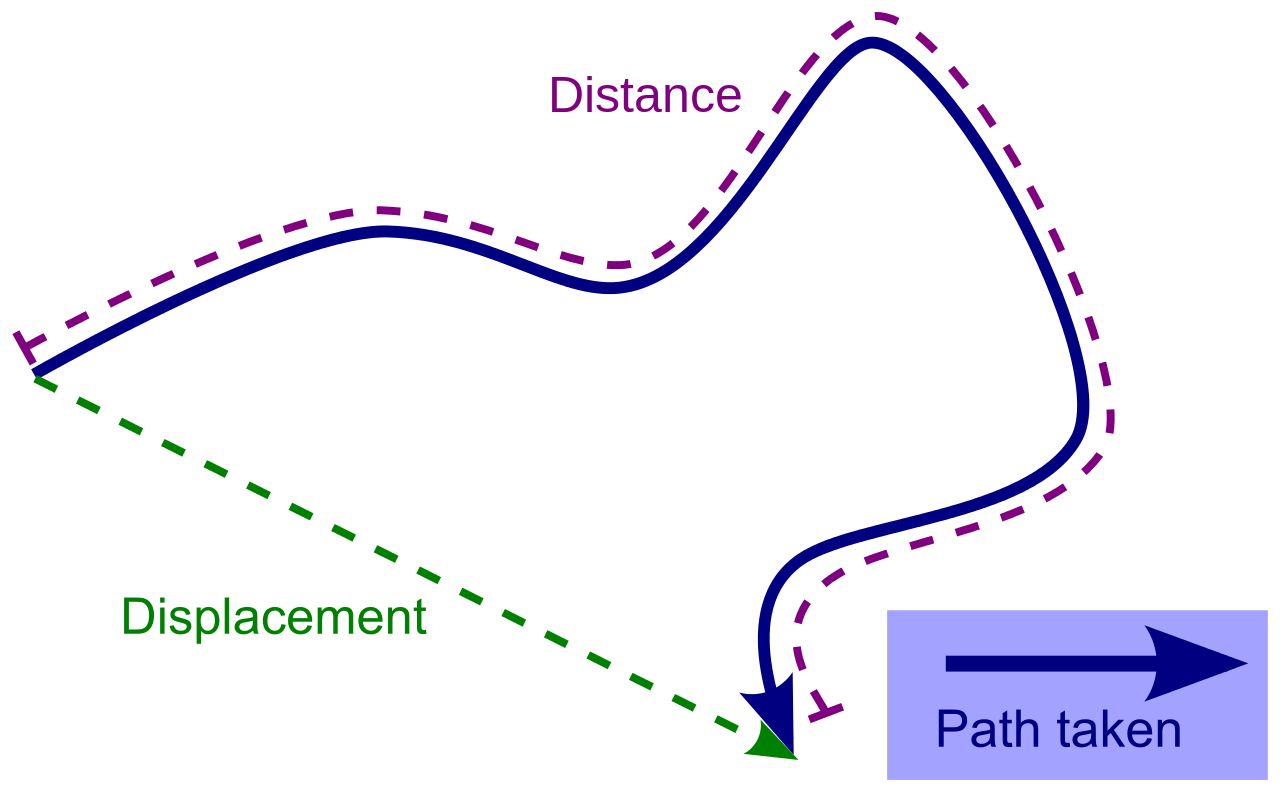
La trayectoria de una partícula es un vector función del tiempo, que define la curva que traza la partícula en movimiento, dada por
La distancia recorrida es siempre mayor o igual al desplazamiento.
Velocidad y rapidez
La velocidad de una partícula es una cantidad vectorial que describe la dirección y la magnitud del movimiento de la partícula. Más matemáticamente, la tasa de cambio del vector de posición de un punto con respecto al tiempo es la velocidad del punto. Considere la relación formada al dividir la diferencia de dos posiciones de una partícula ( desplazamiento ) por el intervalo de tiempo. Esta relación se llama velocidad promedio durante ese intervalo de tiempo y se define como
La rapidez de un objeto es la magnitud de su velocidad. Es una cantidad escalar:
Aceleración
El vector velocidad puede cambiar en magnitud y dirección o ambas a la vez. Por tanto, la aceleración representa tanto la tasa de cambio de la magnitud del vector velocidad como la tasa de cambio de dirección de ese vector. El mismo razonamiento utilizado con respecto a la posición de una partícula para definir la velocidad, se puede aplicar a la velocidad para definir la aceleración. La aceleración de una partícula es el vector definido por la tasa de cambio del vector velocidad. La aceleración promedio de una partícula durante un intervalo de tiempo se define como la relación.
vt
La aceleración de la partícula es el límite de la aceleración promedio cuando el intervalo de tiempo se acerca a cero, que es la derivada del tiempo,
Alternativamente,
Por tanto, la aceleración es la primera derivada del vector velocidad y la segunda derivada del vector posición de esa partícula. En un sistema de referencia no giratorio, las derivadas de las direcciones de las coordenadas no se consideran ya que sus direcciones y sus magnitudes son constantes.
La magnitud de la aceleración de un objeto es la magnitud | un | de su vector de aceleración. Es una cantidad escalar:
Vector de posición relativa
Un vector de posición relativa es un vector que define la posición de un punto con respecto a otro. Es la diferencia de posición de los dos puntos. La posición de un punto A con respecto a otro punto B es simplemente la diferencia entre sus posiciones.
que es la diferencia entre los componentes de sus vectores de posición.
Si el punto A tiene componentes de posición
y el punto B tiene componentes de posición
entonces la posición del punto A con respecto al punto B es la diferencia entre sus componentes:
Velocidad relativa
Velocidades relativas entre dos partículas en mecánica clásica.
La velocidad de un punto con respecto a otro es simplemente la diferencia entre sus velocidades.
Si el punto A tiene componentes de velocidad y el punto B tiene componentes de velocidad , entonces la velocidad del punto A en relación con el punto B es la diferencia entre sus componentes:
Alternativamente, este mismo resultado podría obtenerse calculando la derivada temporal del vector de posición relativa r B/A .
aceleración relativa
La aceleración de un punto C con respecto a otro punto B es simplemente la diferencia entre sus aceleraciones.
Si el punto C tiene componentes de aceleración
y el punto B tiene componentes de aceleración
, entonces la aceleración del punto C con respecto al punto B es la diferencia entre sus componentes:
Alternativamente, este mismo resultado podría obtenerse calculando la segunda derivada temporal del vector de posición relativa r B/A . [13]
Suponiendo que se conocen las condiciones iniciales de la posición, , y la velocidad en el tiempo , la primera integración produce la velocidad de la partícula en función del tiempo. [a]
Una segunda integración cede su camino (trayectoria),
Se pueden derivar relaciones adicionales entre desplazamiento, velocidad, aceleración y tiempo. Como la aceleración es constante,
Se puede obtener una relación entre velocidad, posición y aceleración sin dependencia explícita del tiempo resolviendo la aceleración promedio por tiempo y sustituyendo y simplificando
El producto escalar se puede sustituir por el coseno del ángulo α entre los vectores (ver Interpretación geométrica del producto escalar para más detalles) y los vectores por sus magnitudes, en cuyo caso:
En el caso de la aceleración siempre en la dirección del movimiento y la dirección del movimiento debe ser positiva o negativa, el ángulo entre los vectores ( α ) es 0, entonces , y
Esto reduce las ecuaciones paramétricas del movimiento de la partícula a una relación cartesiana de velocidad versus posición. Esta relación es útil cuando se desconoce el tiempo. También sabemos que o es el área bajo una gráfica de velocidad-tiempo. [15]
Gráfico de física de velocidad y tiempo
Podemos tomar sumando el área superior y el área inferior. El área inferior es un rectángulo, y el área de un rectángulo es donde está el ancho y el alto. En este caso y (el aquí es diferente de la aceleración ). Esto significa que el área inferior es . Ahora busquemos el área superior (un triángulo). El área de un triángulo es donde está la base y es la altura. [16] En este caso, y o . Sumar y da como resultado la ecuación da como resultado la ecuación . [17] Esta ecuación es aplicable cuando se desconoce la velocidad final v .
Figura 2: Velocidad y aceleración para un movimiento circular no uniforme: el vector velocidad es tangencial a la órbita, pero el vector aceleración no está radialmente hacia adentro debido a su componente tangencial a θ que aumenta la velocidad de rotación: d ω /d t = | a θ |/ R .
Trayectorias de partículas en coordenadas cilíndricas-polares.
A menudo es conveniente formular la trayectoria de una partícula r ( t ) = ( x ( t ), y ( t ), z ( t )) utilizando coordenadas polares en el plano X – Y. En este caso, su velocidad y aceleración toman una forma conveniente.
Recuerde que la trayectoria de una partícula P está definida por su vector de coordenadas r medido en un sistema de referencia fijo F. A medida que la partícula se mueve, su vector de coordenadas r ( t ) traza su trayectoria, que es una curva en el espacio, dada por:
Considere una partícula P que se mueve solo sobre la superficie de un cilindro circular r ( t ) = constante, es posible alinear el eje z del marco fijo F con el eje del cilindro. Entonces, el ángulo θ alrededor de este eje en el plano x – y se puede utilizar para definir la trayectoria como,
rθt
Las coordenadas cilíndricas para r ( t ) se pueden simplificar introduciendo los vectores unitarios radiales y tangenciales,
Usando esta notación, r ( t ) toma la forma,
rtR
rθzv Prt
De manera similar, la aceleración a P , que es la derivada temporal de la velocidad v P , viene dada por:
El término que actúa hacia el centro de curvatura de la trayectoria en ese punto de la trayectoria, se denomina comúnmente aceleración centrípeta . El término se llama aceleración de Coriolis .
Radio constante
Si la trayectoria de la partícula se limita a descansar sobre un cilindro, entonces el radio r es constante y los vectores velocidad y aceleración se simplifican. La velocidad de v P es la derivada temporal de la trayectoria r ( t ),
Trayectorias circulares planas
Cada partícula de la rueda viaja en una trayectoria circular plana (Kinematics of Machinery, 1876). [18]
Un caso especial de trayectoria de una partícula en un cilindro circular ocurre cuando no hay movimiento a lo largo del eje z :
Trayectorias puntuales en un cuerpo que se mueve en el plano.
El movimiento de los componentes de un sistema mecánico se analiza adjuntando un marco de referencia a cada parte y determinando cómo se mueven los distintos marcos de referencia entre sí. Si la rigidez estructural de las piezas es suficiente, entonces se puede despreciar su deformación y se pueden utilizar transformaciones rígidas para definir este movimiento relativo. Esto reduce la descripción del movimiento de las diversas partes de un sistema mecánico complicado a un problema de descripción de la geometría de cada parte y la asociación geométrica de cada parte con respecto a otras partes.
La geometría es el estudio de las propiedades de las figuras que permanecen iguales mientras el espacio se transforma de diversas maneras; más técnicamente, es el estudio de invariantes bajo un conjunto de transformaciones. [19] Estas transformaciones pueden provocar el desplazamiento del triángulo en el plano, dejando sin cambios el ángulo del vértice y las distancias entre vértices. La cinemática a menudo se describe como geometría aplicada, donde el movimiento de un sistema mecánico se describe utilizando las transformaciones rígidas de la geometría euclidiana.
Las coordenadas de los puntos en un plano son vectores bidimensionales en R 2 (espacio bidimensional). Las transformaciones rígidas son aquellas que preservan la distancia entre dos puntos cualesquiera. El conjunto de transformaciones rígidas en un espacio de n dimensiones se denomina grupo euclidiano especial en R n y se denota SE( n ) .
Desplazamientos y movimiento
El movimiento de cada uno de los componentes de la máquina de vapor Boulton & Watt (1784) está modelado mediante un conjunto continuo de desplazamientos rígidos.
La posición de un componente de un sistema mecánico con respecto a otro se define introduciendo un sistema de referencia, digamos M , en uno de ellos que se mueve con respecto a un sistema fijo, F, en el otro. La transformación rígida, o desplazamiento, de M con respecto a F define la posición relativa de los dos componentes. Un desplazamiento consiste en la combinación de una rotación y una traslación .
El conjunto de todos los desplazamientos de M con respecto a F se llama espacio de configuración de M. Una curva suave de una posición a otra en este espacio de configuración es un conjunto continuo de desplazamientos, llamado movimiento de M con respecto a F. El movimiento de un El cuerpo consta de un conjunto continuo de rotaciones y traslaciones.
Representación matricial
La combinación de rotación y traslación en el plano R 2 se puede representar mediante un cierto tipo de matriz de 3 × 3 conocida como transformada homogénea. La transformada homogénea de 3×3 se construye a partir de una matriz de rotación de 2×2 A ( φ ) y el vector de traslación de 2×1 d = ( d x , d y ), como:
zrxy
En particular, dejemos que r defina las coordenadas de los puntos en un sistema de referencia M coincidente con un sistema fijo F. Luego, cuando el origen de M es desplazado por el vector de traslación d con respecto al origen de F y rotado por el ángulo φ con respecto al eje x de F , las nuevas coordenadas en F de los puntos en M vienen dadas por:
Las transformaciones homogéneas representan transformaciones afines . Esta formulación es necesaria porque una traslación no es una transformación lineal de R 2 . Sin embargo, al utilizar geometría proyectiva, de modo que R 2 se considere un subconjunto de R 3 , las traslaciones se convierten en transformaciones lineales afines. [20]
Traducción pura
Si un cuerpo rígido se mueve de manera que su sistema de referencia M no gira ( θ = 0) con respecto al sistema fijo F , el movimiento se llama traslación pura. En este caso, la trayectoria de cada punto del cuerpo es un desplazamiento de la trayectoria d ( t ) del origen de M, es decir:
Así, para cuerpos en traslación pura, la velocidad y aceleración de cada punto P del cuerpo vienen dadas por:
v Oa OM.pM
Rotación de un cuerpo alrededor de un eje fijo.
Figura 1: El vector de velocidad angular Ω apunta hacia arriba para la rotación en sentido antihorario y hacia abajo para la rotación en el sentido de las agujas del reloj, como lo especifica la regla de la mano derecha . La posición angular θ ( t ) cambia con el tiempo a una velocidad ω ( t ) = d θ /d t .
La cinemática rotacional o angular es la descripción de la rotación de un objeto. [21] En lo que sigue, la atención se limita a la simple rotación alrededor de un eje de orientación fija. El eje z se ha elegido por conveniencia.
Posición
Esto permite la descripción de una rotación como la posición angular de un sistema de referencia plano M con respecto a un F fijo alrededor de este eje z compartido . Las coordenadas p = ( x , y ) en M están relacionadas con las coordenadas P = (X, Y) en F mediante la ecuación matricial:
dónde
MF
Velocidad
Si el punto p no se mueve en M , su velocidad en F viene dada por
pPt
MFωθ
Aceleración
La aceleración de P ( t ) en F se obtiene como la derivada temporal de la velocidad,
MF
La descripción de la rotación involucra entonces estas tres cantidades:
Posición angular : la distancia orientada desde un origen seleccionado en el eje de rotación hasta un punto de un objeto es un vector r ( t ) que localiza el punto. El vector r ( t ) tiene alguna proyección (o, equivalentemente, alguna componente) r ⊥ ( t ) en un plano perpendicular al eje de rotación. Entonces, la posición angular de ese punto es el ángulo θ desde un eje de referencia (normalmente el eje x positivo ) hasta el vector r ⊥ ( t ) en un sentido de rotación conocido (normalmente dado por la regla de la mano derecha ).
Velocidad angular : la velocidad angular ω es la velocidad a la que la posición angular θ cambia con respecto al tiempo t :
La velocidad angular está representada en la Figura 1 mediante un vector Ω que apunta a lo largo del eje de rotación con magnitud ω y sentido determinado por la dirección de rotación dada por la regla de la mano derecha .
Aceleración angular : la magnitud de la aceleración angular α es la velocidad a la que la velocidad angular ω cambia con respecto al tiempo t :
Las ecuaciones de la cinemática traslacional se pueden extender fácilmente a la cinemática rotacional plana para aceleración angular constante con simples intercambios de variables:
Aquí θ i y θ f son, respectivamente, las posiciones angulares inicial y final, ω i y ω f son, respectivamente, las velocidades angulares inicial y final, y α es la aceleración angular constante. Aunque la posición en el espacio y la velocidad en el espacio son vectores verdaderos (en términos de sus propiedades bajo rotación), al igual que la velocidad angular, el ángulo en sí no es un vector verdadero.
Trayectorias puntuales en el cuerpo moviéndose en tres dimensiones.
Fórmulas importantes en cinemática definen la velocidad y la aceleración de puntos en un cuerpo en movimiento mientras trazan trayectorias en un espacio tridimensional. Esto es particularmente importante para el centro de masa de un cuerpo, que se utiliza para derivar ecuaciones de movimiento utilizando la segunda ley de Newton o las ecuaciones de Lagrange .
Posición
Para definir estas fórmulas, el movimiento de un componente B de un sistema mecánico se define por el conjunto de rotaciones [A( t )] y traslaciones d ( t ) ensambladas en la transformación homogénea [T( t )]=[A ( t ), d ( t )]. Si p son las coordenadas de un punto P en B medidas en el sistema de referencia en movimiento M , entonces la trayectoria de este punto trazada en F viene dada por:
PP
Esta ecuación para la trayectoria de P se puede invertir para calcular el vector de coordenadas p en M como:
Velocidad
La velocidad del punto P a lo largo de su trayectoria P ( t ) se obtiene como la derivada temporal de este vector de posición,
p
Esta fórmula se puede modificar para obtener la velocidad de P operando sobre su trayectoria P ( t ) medida en el marco fijo F. Sustituyendo la transformada inversa por p en la ecuación de velocidad se obtiene:
S
Multiplicando por el operador [ S ], la fórmula para la velocidad v P toma la forma:
ω
POM
O
Aceleración
La aceleración de un punto P en un cuerpo en movimiento B se obtiene como la derivada tiempo de su vector velocidad:
Esta ecuación se puede ampliar en primer lugar calculando
La fórmula para la aceleración A P ahora se puede obtener como:
α
POM
M
Restricciones cinemáticas
Las restricciones cinemáticas son restricciones al movimiento de los componentes de un sistema mecánico. Se puede considerar que las restricciones cinemáticas tienen dos formas básicas: (i) restricciones que surgen de bisagras, deslizadores y juntas de leva que definen la construcción del sistema, llamadas restricciones holonómicas , y (ii) restricciones impuestas a la velocidad del sistema, como la restricción de filo de cuchillo de los patines sobre hielo sobre un plano, o el rodamiento sin deslizamiento de un disco o esfera en contacto con un plano, que se denominan restricciones no holonómicas . Los siguientes son algunos ejemplos comunes.
Un objeto que rueda contra una superficie sin deslizarse obedece a la condición de que la velocidad de su centro de masa sea igual al producto cruzado de su velocidad angular con un vector desde el punto de contacto hasta el centro de masa:
Para el caso de un objeto que no se inclina ni gira, esto se reduce a .
Cordón inextensible
Este es el caso en el que los cuerpos están conectados por una cuerda idealizada que permanece en tensión y no puede cambiar de longitud. La restricción es que la suma de las longitudes de todos los segmentos de la cuerda es la longitud total y, en consecuencia, la derivada temporal de esta suma es cero. [22] [23] [24] Un problema dinámico de este tipo es el péndulo . Otro ejemplo es un tambor que gira por la fuerza de la gravedad al caer un peso sujeto al borde mediante una cuerda inextensible. [25] Un problema de equilibrio (es decir, no cinemático) de este tipo es la catenaria . [26]
Pares cinemáticos
Reuleaux llamó pares cinemáticos a las conexiones ideales entre los componentes que forman una máquina . Distinguió entre pares superiores que se decía que tenían contacto lineal entre los dos eslabones y pares inferiores que tenían contacto superficial entre los eslabones. J. Phillips muestra que hay muchas formas de construir pares que no se ajustan a esta simple clasificación. [27]
par inferior
Un par inferior es una unión ideal, o restricción holonómica, que mantiene el contacto entre un punto, línea o plano en un cuerpo sólido (tridimensional) en movimiento y una línea o plano puntual correspondiente en el cuerpo sólido fijo. Existen los siguientes casos:
Un par de revolución, o articulación articulada, requiere que una línea o eje en el cuerpo en movimiento permanezca colineal con una línea en el cuerpo fijo, y que un plano perpendicular a esta línea en el cuerpo en movimiento mantenga contacto con un plano perpendicular similar. en el cuerpo fijo. Esto impone cinco restricciones al movimiento relativo de los eslabones, que por tanto tiene un grado de libertad, que es pura rotación alrededor del eje de la bisagra.
Una articulación prismática , o deslizador, requiere que una línea o eje en el cuerpo en movimiento permanezca colineal con una línea en el cuerpo fijo, y que un plano paralelo a esta línea en el cuerpo en movimiento mantenga contacto con un plano paralelo similar en el cuerpo fijo. Esto impone cinco restricciones al movimiento relativo de los eslabones, que por tanto tiene un grado de libertad. Este grado de libertad es la distancia del deslizamiento a lo largo de la línea.
Una junta cilíndrica requiere que una línea, o eje, en el cuerpo en movimiento permanezca colineal con una línea en el cuerpo fijo. Es una combinación de una junta giratoria y una junta deslizante. Esta articulación tiene dos grados de libertad. La posición del cuerpo en movimiento está definida tanto por la rotación como por el deslizamiento a lo largo del eje.
Una articulación esférica, o rótula, requiere que un punto del cuerpo en movimiento mantenga contacto con un punto del cuerpo fijo. Esta articulación tiene tres grados de libertad.
Una articulación plana requiere que un plano del cuerpo en movimiento mantenga contacto con un plano del cuerpo fijo. Esta articulación tiene tres grados de libertad.
pares superiores
En términos generales, un par superior es una restricción que requiere que una curva o superficie en el cuerpo en movimiento mantenga contacto con una curva o superficie en el cuerpo fijo. Por ejemplo, el contacto entre una leva y su seguidor es un par superior llamado junta de leva . De manera similar, el contacto entre las curvas de evolución que forman los dientes de engrane de dos engranajes son juntas de leva.
Cadenas cinemáticas
Ilustración de un varillaje de cuatro barras de Kinematics of Machinery, 1876
Los cuerpos rígidos ("eslabones") conectados por pares cinemáticos ("uniones") se conocen como cadenas cinemáticas . Los mecanismos y robots son ejemplos de cadenas cinemáticas. El grado de libertad de una cadena cinemática se calcula a partir del número de eslabones y del número y tipo de uniones mediante la fórmula de movilidad . Esta fórmula también se puede utilizar para enumerar las topologías de cadenas cinemáticas que tienen un grado de libertad determinado, lo que se conoce como síntesis de tipos en el diseño de máquinas.
Ejemplos
Los eslabones planos de un grado de libertad ensamblados a partir de N eslabones y j bisagras o juntas deslizantes son:
N = 2, j = 1: un varillaje de dos barras que es la palanca;
N = 6, j = 7: un varillaje de seis barras . Este debe tener dos eslabones (“enlaces ternarios”) que sostengan tres uniones. Hay dos topologías distintas que dependen de cómo se conectan los dos enlaces ternarios. En la topología de Watt , los dos enlaces ternarios tienen una unión común; En la topología de Stephenson , los dos enlaces ternarios no tienen una unión común y están conectados por enlaces binarios. [28]
N = 8, j = 10: varillaje de ocho barras con 16 topologías diferentes;
N = 10, j = 13: enlace de diez barras con 230 topologías diferentes;
N = 12, j = 16: varillaje de doce barras con 6.856 topologías.
Para cadenas más grandes y sus topologías de enlace, consulte RP Sunkari y LC Schmidt , "Structural síntesis de cadenas cinemáticas planas mediante la adaptación de un algoritmo de tipo Mckay", Mechanism and Machine Theory #41, págs. 1021-1030 (2006).
^ Joseph Stiles pide (1983). Cinemática. Taylor y Francisco. pag. 1.ISBN0-89116-355-7.
^ Thomas Wallace Wright (1896). Elementos de mecánica que incluyen cinemática, cinética y estática. E y FN Patrocinador. Capítulo 1.
^ Russell C. Hibbeler (2009). "Cinemática y cinética de una partícula". Mecánica de ingeniería: dinámica (12ª ed.). Prentice Hall. pag. 298.ISBN978-0-13-607791-6.
^ Ahmed A. Shabana (2003). "Cinemática de referencia". Dinámica de sistemas multicuerpo (2ª ed.). Prensa de la Universidad de Cambridge. ISBN978-0-521-54411-5.
^ 2.4 Integración, MIT, archivado desde el original el 13 de noviembre de 2021 , consultado el 4 de julio de 2021
^ https://www.youtube.com/watch?v=jLJLXka2wEM Integrales de física del curso intensivo
^ https://www.mathsisfun.com/algebra/trig-area-triangle- without-right-angle.html Área de triángulos sin ángulos rectos
^ kinematics.gif (508 × 368) (Imagen) . Consultado el 3 de noviembre de 2023 .
^ Reuleaux, F .; Kennedy, Alex BW (1876), La cinemática de la maquinaria: esquemas de una teoría de las máquinas, Londres: Macmillan
^ Geometría: el estudio de las propiedades de elementos dados que permanecen invariantes bajo transformaciones específicas. "Definición de geometría". Diccionario en línea Merriam-Webster. 31 de mayo de 2023.
^ Pablo, Richard (1981). Manipuladores de robots: matemáticas, programación y control: el control informático de los manipuladores de robots. MIT Press, Cambridge, MA. ISBN978-0-262-16082-7.
^ R. Douglas Gregory (2006). Capítulo 16. Cambridge, Inglaterra: Universidad de Cambridge. ISBN0-521-82678-0.
^ William Thomson Kelvin y Peter Guthrie Tait (1894). Elementos de Filosofía Natural. Prensa de la Universidad de Cambridge. pag. 4.ISBN1-57392-984-0.
^ William Thomson Kelvin y Peter Guthrie Tait (1894). Elementos de Filosofía Natural. pag. 296.
^ M. Fogiel (1980). "Problema 17-11". El solucionador de problemas de mecánica . Asociación de Investigación y Educación. pag. 613.ISBN0-87891-519-2.
^ Iglesia Irving Porter (1908). Mecánica de la Ingeniería. Wiley. pag. 111.ISBN1-110-36527-6.
^ Morris Kline (1990). Pensamiento Matemático desde la Antigüedad hasta la Modernidad . Prensa de la Universidad de Oxford. pag. 472.ISBN0-19-506136-5.
^ Phillips, Jack (2007). Freedom in Machinery, volúmenes 1 y 2 (reimpresión ed.). Prensa de la Universidad de Cambridge. ISBN978-0-521-67331-0.
^ Tsai, Lung-Wen (2001). Diseño de mecanismos: enumeración de estructuras cinemáticas según función (edición ilustrada). Prensa CRC. pag. 121.ISBN978-0-8493-0901-4.
^ Si bien τ se usa como variable de integración, algunos autores pueden usar t′ como variable de integración, aunque eso puede confundirse con la notación de Lagrange para derivadas [14]
Otras lecturas
Koetsier, Teun (1994), "§8.3 Kinematics", en Grattan-Guinness, Ivor (ed.), Enciclopedia complementaria de historia y filosofía de las ciencias matemáticas , vol. 2, Routledge , págs. 994-1001, ISBN 0-415-09239-6
Luna, Francis C. (2007). Las Máquinas de Leonardo Da Vinci y Franz Reuleaux, Cinemática de Máquinas desde el Renacimiento hasta el Siglo XX . Saltador. ISBN 978-1-4020-5598-0.
Eduard Study (1913) Traductor de DH Delphenich, "Fundamentos y objetivos de la cinemática analítica".
enlaces externos
Busque cinemática en Wikcionario, el diccionario gratuito.
Wikimedia Commons tiene medios relacionados con la cinemática .
Subprograma de Java de cinemática 1D
Physclips: Mecánica con animaciones y videoclips de la Universidad de Nueva Gales del Sur.
Biblioteca digital de modelos cinemáticos para diseño (KMODDL), que presenta películas y fotografías de cientos de modelos funcionales de sistemas mecánicos en la Universidad de Cornell y una biblioteca de libros electrónicos con textos clásicos sobre diseño e ingeniería mecánicos.
Posicionamiento en micropulgadas con componentes cinemáticos



































































































![{\displaystyle [T(\phi ,\mathbf {d} )]={\begin{bmatrix}A(\phi )&\mathbf {d} \\\mathbf {0} &1\end{bmatrix}}={ \begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\\sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50078656eb1b2395a2ad84383cd16868c54649b1)
![{\displaystyle \mathbf {P} =[T(\phi ,\mathbf {d} )]\mathbf {r} ={\begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\ \sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}{\begin{bmatrix}x\\y\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9654bfae7e5d0f825ec57848bd5ab493f408804f)
![{\displaystyle \mathbf {r} (t)=[T(0,\mathbf {d} (t))]\mathbf {p} =\mathbf {d} (t)+\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32f22d9b4fcc015f80b746db422f93b8d8d145dc)

![{\displaystyle \mathbf {P} (t)=[A(t)]\mathbf {p},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
![{\displaystyle [A(t)]={\begin{bmatrix}\cos(\theta (t))&-\sin(\theta (t))\\\sin(\theta (t))&\cos (\theta (t))\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53916525d50fa175a581d579e61b62d7d8a4610d)
![{\displaystyle \mathbf {v} _{P}={\dot {\mathbf {P} }}=[{\dot {A}}(t)]\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/701dae17b9e581be69746145fd6133e7f07f2f16)
![{\displaystyle \mathbf {v} _{P}=[{\dot {A}}(t)][A(t)^{-1}]\mathbf {P} =[\Omega ]\mathbf {P } ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fac9117de99ee6837c171f5f46eede17890bcba)
![{\displaystyle [\Omega ]={\begin{bmatrix}0&-\omega \\\omega &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)

![{\displaystyle \mathbf {A} _{P}={\ddot {P}}(t)=[{\dot {\Omega }}]\mathbf {P} +[\Omega ]{\dot {\mathbf {PAGS} }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62a4ca56d89ccc6d2ec6d0daffd6907b9c47ccd5)
![{\displaystyle \mathbf {A} _{P}=[{\dot {\Omega }}]\mathbf {P} +[\Omega ][\Omega ]\mathbf {P} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50d611f89cc9b7358cec772370a6ee8d79a792a9)
![{\displaystyle [{\dot {\Omega }}]={\begin{bmatrix}0&-\alpha \\\alpha &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d6ebb7e70e2d2370e781ee86ea55cd0fb7d469d7)







![{\displaystyle \mathbf {P} (t)=[T(t)]\mathbf {p} ={\begin{bmatrix}\mathbf {P} \\1\end{bmatrix}}={\begin{bmatrix }A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e928b50529956cc7ca762cee6969f7321c5cf9d)
![{\displaystyle \mathbf {p} =[T(t)]^{-1}\mathbf {P} (t)={\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}= {\begin{bmatrix}A(t)^{\text{T}}&-A(t)^{\text{T}}\mathbf {d} (t)\\0&1\end{bmatrix}}{ \begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e1aa622ad90b69b42880d95b90afb0b27407a60)
![{\displaystyle [A(t)]^{\text{T}}[A(t)]=I.\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e132dec7e35a3f7b5135d601bb20851ce2abe646)
![{\displaystyle \mathbf {v} _{P}=[{\dot {T}}(t)]\mathbf {p} ={\begin{bmatrix}\mathbf {v} _{P}\\0\ end{bmatrix}}=\left({\frac {d}{dt}}{\begin{bmatrix}A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}\right) {\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}={\begin{bmatrix}{\dot {A}}(t)&{\dot {\mathbf {d} }}( t)\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d216e15ab36a895fa2fa109fbdf77b9590d5ccb)
![{\displaystyle {\begin{aligned}\mathbf {v} _{P}&=[{\dot {T}}(t)][T(t)]^{-1}\mathbf {P} (t )\\[4pt]&={\begin{bmatrix}\mathbf {v} _{P}\\0\end{bmatrix}}={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}A&\mathbf {d} \\0&1\end{bmatrix}}^{-1}{\begin{bmatrix}\ mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\ 0&0\end{bmatrix}}A^{-1}{\begin{bmatrix}1&-\mathbf {d} \\0&A\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\ \1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}A^{-1}&-{\dot {A}}A^{-1}\ mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\ [4pt]&={\begin{bmatrix}{\dot {A}}A^{\text{T}}&-{\dot {A}}A^{\text{T}}\mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[6pt]\ mathbf {v} _{P}&=[S]\mathbf {P}.\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6aa70149e117b2b14b1f6d473dd453dc5530c7e6)
![{\displaystyle [S]={\begin{bmatrix}\Omega &-\Omega \mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90d988bfd6ff36b285d6294bf167b63d5f91bdef)
![{\displaystyle [\Omega ]={\dot {A}}A^{\text{T}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/21d0117f60aeca689c59abbfe4b88b1a287a1b63)
+{\dot {\mathbf {d} }}=\omega \times \mathbf { R} _{P/O}+\mathbf {v} _{O},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/127655f82eb90e56b116afbcf8aa567b908e516b)


![{\displaystyle \mathbf {A} _{P}={\frac {d}{dt}}\mathbf {v} _{P}={\frac {d}{dt}}\left([S]\ mathbf {P} \right)=[{\dot {S}}]\mathbf {P} +[S]{\dot {\mathbf {P} }}=[{\dot {S}}]\mathbf { P} +[S][S]\mathbf {P}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80998957f2829ada7a5e77e2fb68a31285e843cb)
![{\displaystyle [{\dot {S}}]={\begin{bmatrix}{\dot {\Omega }}&-{\dot {\Omega }}\mathbf {d} -\Omega {\dot {\ mathbf {d} }}+{\ddot {\mathbf {d} }}\\0&0\end{bmatrix}}={\begin{bmatrix}{\dot {\Omega }}&-{\dot {\Omega }}\mathbf {d} -\Omega \mathbf {v} _{O}+\mathbf {A} _{O}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a39702184d0f72216205c32ebcfa8e0e9c3b478)
![{\displaystyle [S]^{2}={\begin{bmatrix}\Omega &-\Omega \mathbf {d} +\mathbf {v} _{O}\\0&0\end{bmatrix}}^{2 }={\begin{bmatrix}\Omega ^{2}&-\Omega ^{2}\mathbf {d} +\Omega \mathbf {v} _{O}\\0&0\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/557b35e24d57f15d0c9d2998053809be7105a2f9)




