En física , el movimiento circular es el movimiento de un objeto a lo largo de la circunferencia de un círculo o la rotación a lo largo de un arco circular . Puede ser uniforme, con una velocidad de rotación constante y una velocidad tangencial constante , o no uniforme con una velocidad de rotación cambiante. La rotación alrededor de un eje fijo de un cuerpo tridimensional implica el movimiento circular de sus partes. Las ecuaciones de movimiento describen el movimiento del centro de masa de un cuerpo, que permanece a una distancia constante del eje de rotación . En el movimiento circular, la distancia entre el cuerpo y un punto fijo en su superficie permanece igual, es decir, el cuerpo se supone rígido .
Algunos ejemplos de movimiento circular incluyen: órbitas especiales de satélites alrededor de la Tierra ( órbitas circulares ), las aspas de un ventilador de techo girando alrededor de un eje, una piedra atada a una cuerda que se balancea en círculos, un automóvil girando en una curva en una pista de carreras , un electrón moviéndose perpendicularmente a un campo magnético uniforme y un engranaje girando dentro de un mecanismo.
Como el vector de velocidad del objeto cambia de dirección constantemente, el objeto en movimiento experimenta una aceleración por una fuerza centrípeta en la dirección del centro de rotación. Sin esta aceleración, el objeto se movería en línea recta, según las leyes del movimiento de Newton .


En física , el movimiento circular uniforme describe el movimiento de un cuerpo que recorre una trayectoria circular a una velocidad constante . Dado que el cuerpo describe un movimiento circular, su distancia al eje de rotación permanece constante en todo momento. Aunque la velocidad del cuerpo es constante, su velocidad no es constante: la velocidad, una cantidad vectorial , depende tanto de la velocidad del cuerpo como de su dirección de desplazamiento. Este cambio de velocidad indica la presencia de una aceleración; esta aceleración centrípeta es de magnitud constante y se dirige en todo momento hacia el eje de rotación. Esta aceleración, a su vez, es producida por una fuerza centrípeta que también es de magnitud constante y se dirige hacia el eje de rotación.
En el caso de rotación alrededor de un eje fijo de un cuerpo rígido que no es despreciablemente pequeño comparado con el radio de la trayectoria, cada partícula del cuerpo describe un movimiento circular uniforme con la misma velocidad angular, pero con velocidad y aceleración que varían con la posición con respecto al eje.
Para el movimiento en un círculo de radio r , la circunferencia del círculo es C = 2 πr . Si el período para una rotación es T , la velocidad angular de rotación, también conocida como velocidad angular , ω es: ω = 2 π T = 2 π f = d θ d t {\displaystyle \omega ={\frac {2\pi }{T}}=2\pi f={\frac {d\theta }{dt}}} y las unidades son radianes/segundo.
La velocidad del objeto que viaja por el círculo es: v = 2 π r T = ω r {\displaystyle v={\frac {2\pi r}{T}}=\omega r}
El ángulo θ barrido en un tiempo t es: θ = 2 π t T = ω t {\displaystyle \theta =2\pi {\frac {t}{T}}=\omega t}
La aceleración angular , α , de la partícula es: α = d ω d t {\displaystyle \alpha ={\frac {d\omega }{dt}}}
En el caso de movimiento circular uniforme, α será cero.
La aceleración debida al cambio de dirección es: a c = v 2 r = ω 2 r {\displaystyle a_{c}={\frac {v^{2}}{r}}=\omega ^{2}r}
La fuerza centrípeta y centrífuga también se pueden encontrar usando la aceleración: F c = p ˙ = m ˙ = 0 m a c = m v 2 r {\displaystyle F_{c}={\dot {p}}\mathrel {\overset {{\dot {m}}=0}{=}} ma_{c}={\frac {mv^{2}}{r}}}
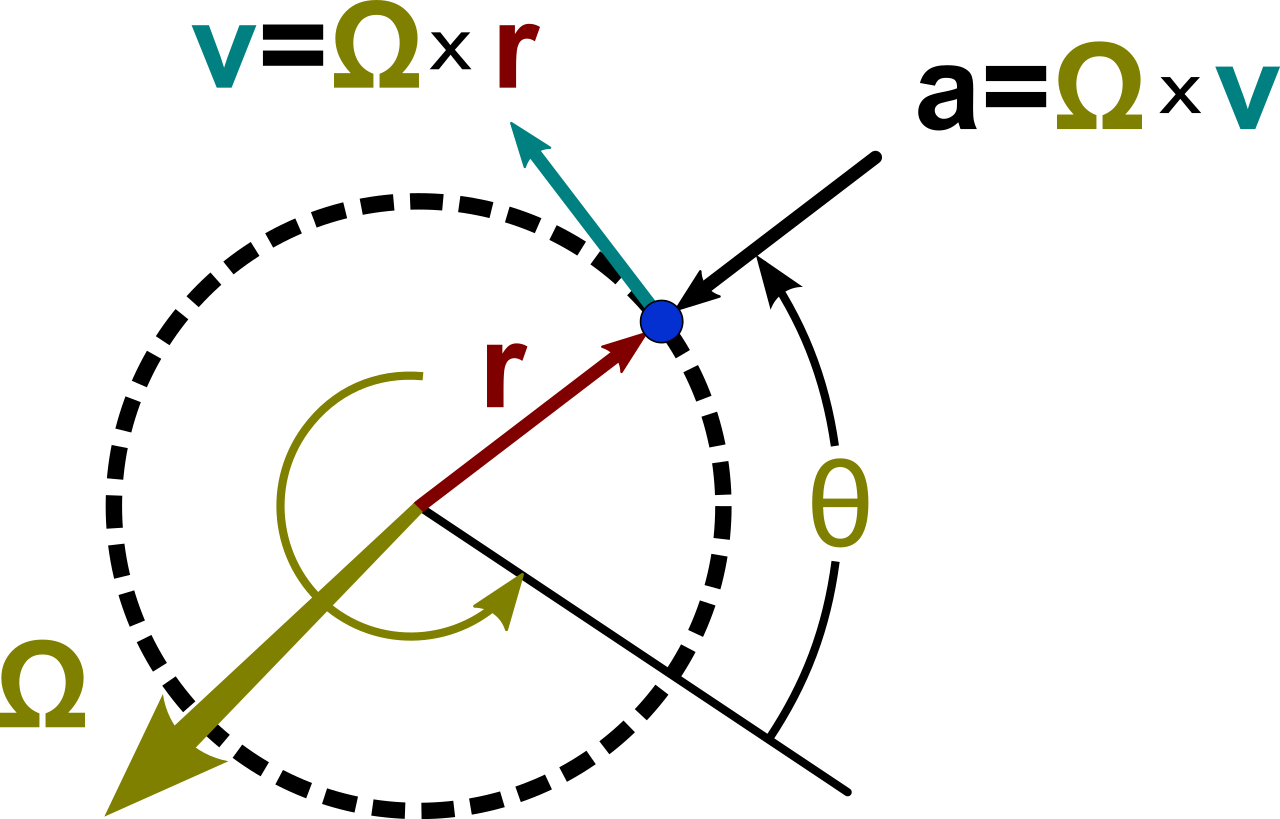
Las relaciones vectoriales se muestran en la Figura 1. El eje de rotación se muestra como un vector ω perpendicular al plano de la órbita y con una magnitud ω = dθ / dt . La dirección de ω se elige utilizando la regla de la mano derecha . Con esta convención para representar la rotación, la velocidad se da por un producto vectorial como que es un vector perpendicular tanto a ω como a r ( t ) , tangencial a la órbita y de magnitud ω r . Del mismo modo, la aceleración se da por que es un vector perpendicular tanto a ω como a v ( t ) de magnitud ω | v | = ω 2 r y dirigido exactamente en sentido opuesto a r ( t ) . [1]
En el caso más simple, la velocidad, la masa y el radio son constantes.
Consideremos un cuerpo de un kilogramo, que se mueve en un círculo de radio un metro, con una velocidad angular de un radián por segundo .
Durante el movimiento circular, el cuerpo se mueve en una curva que puede describirse en el sistema de coordenadas polares como una distancia fija R desde el centro de la órbita tomada como origen, orientada en un ángulo θ ( t ) desde alguna dirección de referencia. Véase la Figura 4. El vector de desplazamiento es el vector radial desde el origen hasta la ubicación de la partícula: donde es el vector unitario paralelo al vector de radio en el tiempo t y apuntando lejos del origen. Es conveniente introducir también el vector unitario ortogonal a , es decir . Es habitual orientar para apuntar en la dirección de viaje a lo largo de la órbita.
La velocidad es la derivada temporal del desplazamiento:
Como el radio del círculo es constante, el componente radial de la velocidad es cero. El vector unitario tiene una magnitud invariante en el tiempo de la unidad, por lo que a medida que el tiempo varía su punta siempre se encuentra en un círculo de radio unitario, con un ángulo θ igual al ángulo de . Si el desplazamiento de la partícula gira a través de un ángulo dθ en el tiempo dt , también lo hace , describiendo un arco en el círculo unitario de magnitud dθ . Vea el círculo unitario a la izquierda de la Figura 4. Por lo tanto: donde la dirección del cambio debe ser perpendicular a (o, en otras palabras, a lo largo de ) porque cualquier cambio en la dirección de cambiaría el tamaño de . El signo es positivo porque un aumento en dθ implica que el objeto y se han movido en la dirección de . Por lo tanto, la velocidad se convierte en:
La aceleración del cuerpo también se puede descomponer en componentes radial y tangencial. La aceleración es la derivada temporal de la velocidad:
La derivada temporal de se encuentra de la misma manera que para . Nuevamente, es un vector unitario y su punta traza un círculo unitario con un ángulo que es π /2 + θ . Por lo tanto, un aumento en el ángulo dθ por implica traza un arco de magnitud dθ , y como es ortogonal a , tenemos: donde un signo negativo es necesario para mantener la ortogonalidad a . (De lo contrario, el ángulo entre y disminuiría con un aumento en dθ .) Vea el círculo unitario a la izquierda de la Figura 4. En consecuencia, la aceleración es:
La aceleración centrípeta es el componente radial, que se dirige radialmente hacia adentro: mientras que el componente tangencial cambia la magnitud de la velocidad:
El movimiento circular se puede describir utilizando números complejos . Sea el eje x el eje real y el eje el eje imaginario. La posición del cuerpo se puede expresar entonces como , un "vector" complejo: donde i es la unidad imaginaria , y es el argumento del número complejo en función del tiempo, t .
Dado que el radio es constante: donde un punto indica diferenciación con respecto al tiempo.
Con esta notación, la velocidad se convierte en: y la aceleración se convierte en:
El primer término es opuesto en dirección al vector de desplazamiento y el segundo es perpendicular a él, tal como los resultados mostrados anteriormente.
La figura 1 ilustra los vectores de velocidad y aceleración para un movimiento uniforme en cuatro puntos diferentes de la órbita. Como la velocidad v es tangente a la trayectoria circular, no hay dos velocidades que apunten en la misma dirección. Aunque el objeto tiene una rapidez constante , su dirección siempre está cambiando. Este cambio de velocidad es causado por una aceleración a , cuya magnitud (al igual que la de la velocidad) se mantiene constante, pero cuya dirección también está cambiando siempre. La aceleración apunta radialmente hacia adentro ( centrípetamente ) y es perpendicular a la velocidad. Esta aceleración se conoce como aceleración centrípeta.
Para una trayectoria de radio r , cuando se barre un ángulo θ , la distancia recorrida en la periferia de la órbita es s = rθ . Por lo tanto, la velocidad de desplazamiento alrededor de la órbita es donde la velocidad angular de rotación es ω . (Por reordenamiento, ω = v / r .) Por lo tanto, v es una constante, y el vector de velocidad v también gira con magnitud constante v , a la misma velocidad angular ω .
En este caso, el vector de tres aceleraciones es perpendicular al vector de tres velocidades, y el cuadrado de la aceleración propia, expresado como un invariante escalar, el mismo en todos los marcos de referencia, se convierte en la expresión para el movimiento circular, o, tomando la raíz cuadrada positiva y usando las tres aceleraciones, llegamos a la aceleración propia para el movimiento circular:
El círculo de la izquierda en la Figura 2 es la órbita que muestra los vectores de velocidad en dos momentos adyacentes. A la derecha, estas dos velocidades se mueven de modo que sus colas coinciden. Como la velocidad es constante, los vectores de velocidad de la derecha trazan un círculo a medida que avanza el tiempo. Para un ángulo de barrido dθ = ω dt, el cambio en v es un vector en ángulo recto con v y de magnitud v dθ , lo que a su vez significa que la magnitud de la aceleración está dada por

En un movimiento circular no uniforme , un objeto se mueve en una trayectoria circular con una velocidad variable . Como la velocidad cambia, hay una aceleración tangencial además de la aceleración normal.
En un movimiento circular no uniforme, la aceleración neta (a) se produce en la dirección de Δ v , que se dirige hacia el interior del círculo pero no pasa por su centro (véase la figura). La aceleración neta se puede descomponer en dos componentes: aceleración tangencial y aceleración normal, también conocida como aceleración centrípeta o radial. A diferencia de la aceleración tangencial, la aceleración centrípeta está presente tanto en el movimiento circular uniforme como en el no uniforme.

En un movimiento circular no uniforme, la fuerza normal no siempre apunta en la dirección opuesta del peso . Aquí hay un ejemplo con un objeto que se desplaza en una trayectoria recta y luego vuelve a realizar un bucle para volver a una trayectoria recta.

Este diagrama muestra que la fuerza normal apunta en direcciones distintas a la opuesta a la fuerza del peso. La fuerza normal es en realidad la suma de las fuerzas radial y tangencial. El componente de la fuerza del peso es responsable de la fuerza tangencial (hemos descuidado la fuerza de fricción). La fuerza radial (fuerza centrípeta) se debe al cambio en la dirección de la velocidad, como se explicó anteriormente.
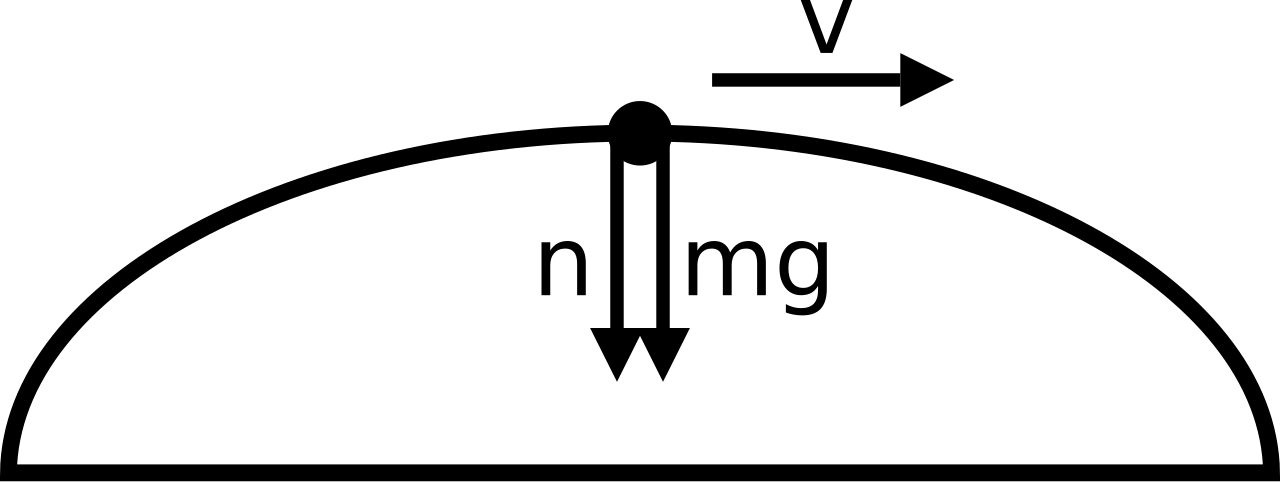
En un movimiento circular no uniforme, la fuerza normal y el peso pueden apuntar en la misma dirección. Ambas fuerzas pueden apuntar hacia abajo, pero el objeto permanecerá en una trayectoria circular sin caer directamente hacia abajo. Primero, veamos por qué la fuerza normal puede apuntar hacia abajo en primer lugar. En el primer diagrama, digamos que el objeto es una persona sentada dentro de un avión, las dos fuerzas apuntan hacia abajo solo cuando llega a la parte superior del círculo. La razón de esto es que la fuerza normal es la suma de la fuerza tangencial y la fuerza centrípeta. La fuerza tangencial es cero en la parte superior (ya que no se realiza trabajo cuando el movimiento es perpendicular a la dirección de la fuerza aplicada. Aquí la fuerza del peso es perpendicular a la dirección del movimiento del objeto en la parte superior del círculo) y la fuerza centrípeta apunta hacia abajo, por lo tanto, la fuerza normal también apuntará hacia abajo. Desde un punto de vista lógico, una persona que viaja en el avión estará boca abajo en la parte superior del círculo. En ese momento, el asiento de la persona está realmente empujándola hacia abajo, que es la fuerza normal.
La razón por la que un objeto no cae cuando se somete únicamente a fuerzas descendentes es sencilla. Piense en lo que mantiene a un objeto en el aire después de ser lanzado. Una vez que un objeto es lanzado al aire, solo existe la fuerza descendente de la gravedad de la Tierra que actúa sobre el objeto. Eso no significa que una vez que un objeto es lanzado al aire, caerá instantáneamente. Lo que mantiene ese objeto en el aire es su velocidad . La primera de las leyes del movimiento de Newton establece que la inercia de un objeto lo mantiene en movimiento y, dado que el objeto en el aire tiene una velocidad, tenderá a seguir moviéndose en esa dirección.
También se puede lograr una velocidad angular variable para un objeto que se mueve en una trayectoria circular si el cuerpo giratorio no tiene una distribución de masa homogénea. Para objetos no homogéneos, es necesario abordar el problema como en [2] .
Se pueden deducir las fórmulas de velocidad, aceleración y tirón, suponiendo que todas las variables dependen de :
Otras transformaciones pueden implicar derivadas correspondientes:
La resolución de problemas relacionados con el movimiento circular no uniforme implica el análisis de fuerzas. En un movimiento circular uniforme, la única fuerza que actúa sobre un objeto que se desplaza en círculo es la fuerza centrípeta. En un movimiento circular no uniforme, hay fuerzas adicionales que actúan sobre el objeto debido a una aceleración tangencial distinta de cero. Aunque hay fuerzas adicionales que actúan sobre el objeto, la suma de todas las fuerzas que actúan sobre el objeto tendrá que ser igual a la fuerza centrípeta.
La aceleración radial se utiliza para calcular la fuerza total. La aceleración tangencial no se utiliza para calcular la fuerza total porque no es la responsable de mantener el objeto en una trayectoria circular. La única aceleración responsable de mantener un objeto en movimiento en un círculo es la aceleración radial. Dado que la suma de todas las fuerzas es la fuerza centrípeta, no es necesario y, por lo general, no se recomienda dibujar la fuerza centrípeta en un diagrama de cuerpo libre.
Usando , podemos dibujar diagramas de cuerpo libre para enumerar todas las fuerzas que actúan sobre un objeto y luego establecerlo como igual a . Después, podemos resolver lo que sea desconocido (esto puede ser masa, velocidad, radio de curvatura, coeficiente de fricción, fuerza normal, etc.). Por ejemplo, la imagen anterior que muestra un objeto en la parte superior de un semicírculo se expresaría como .
En un movimiento circular uniforme, la aceleración total de un objeto en una trayectoria circular es igual a la aceleración radial. Debido a la presencia de aceleración tangencial en un movimiento circular no uniforme, esto ya no es así. Para hallar la aceleración total de un objeto en una trayectoria circular no uniforme, halla la suma vectorial de la aceleración tangencial y la aceleración radial.
La aceleración radial sigue siendo igual a . La aceleración tangencial es simplemente la derivada de la velocidad en cualquier punto dado: . Esta suma de los cuadrados de las aceleraciones radial y tangencial separadas solo es correcta para el movimiento circular; para el movimiento general dentro de un plano con coordenadas polares , el término de Coriolis debe agregarse a , mientras que la aceleración radial se convierte entonces en .
























![{\displaystyle z=x+iy=R\left(\cos[\theta (t)]+i\sin[\theta (t)]\right)=Re^{i\theta (t)}\,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5f70473a1d45582449264bfb173bcd862be3dae7)


![{\displaystyle v={\dot {z}}={\frac {d}{dt}}(Re^{i\theta [t]}\right)=R{\frac {d}{dt}}(e^{i\theta [t]}\right)=Re^{i\theta (t)}{\frac {d}{dt}}(i\theta [t]\right)=iR{\dot {\theta }}(t)e^{i\theta (t)}=i\omega Re^{i\theta (t)}=i\omega z}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfe1c9630c24006fe24bf7de9194566b0aff4ca9)



























