Dirección (automóvil)
La dirección es el conjunto de órganos que permiten a cualquier vehículo variar su trayectoria para seguir el rumbo deseado.
Una excepción es el caso del ferrocarril, en el que la dirección es controlada por medio de raíles y desvíos.
[1] La razón está en la necesidad de contar con una industria del metal lo suficientemente desarrollada para permitir su manufactura.
En el primer caso el carro descansaba directamente sobre los ejes rotatorios, inicialmente asegurados mediante algún mecanismo para evitar su desplazamiento longitudinal, que con el tiempo derivó en un sistema de fijación por los extremos.
A cambio es duradero y mucho más fácil de fabricar, por lo que su diseño básico se ha mantenido hasta la actualidad.
Sin embargo no dan respuesta al problema que de cara a la estabilidad supone unir ambas ruedas, forzándolas a girar al mismo número de revoluciones.
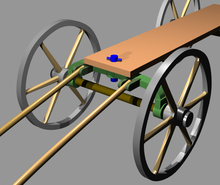
La solución vino de mano de los "ejes rotos", gracias a un avance técnico -el buje-, evolución del cubo que permite a cada rueda girar libremente en sus extremos -ruedas "locas" o desacopladas (loose wheels en inglés)-, haciendo posible que el eje pueda efectuar giros tan cerrados como sea necesario.
Sin embargo el sistema es inadecuado cuando la vía -el ancho- del eje es elevada, puesto que en curvas cerradas la batalla -o distancia entre la rueda delantera y trasera- aumentará mucho en el lado exterior de la curva disminuyendo en el interior, lo que perjudica la estabilidad y complica su interacción con un sistema de suspensión, siendo imposible utilizarse en suspensiones independientes.
Diseñada en su concepción actual para lograr que la rueda interior y exterior tracen círculos de diferentes radios, el sistema original fue concebido intuitivamente para mantener las ruedas paralelas, lo que resultó ser inadecuado.
De mantenerse paralelos, ninguno de los pivotes se orientaría a ese punto común sino que se dirigirían a dos puntos separados precisamente por la anchura del eje y el vehículo giraría en torno a un punto intermedio entre ambos, con el resultado de que también en este caso cada rueda será continuamente arrastrada por la otra, perjudicando la estabilidad.
La solución consistió en dividir el mecanismo de dirección en dos partes, una sujeta a la masa suspendida del vehículo y otra a la masa no suspendida, que pudieran absorber estas diferencias.
Esta fuerza se debe principalmente a la resistencia del neumático a ser deformado y la posición adelantada del centro de presiones respecto al centro de la rueda.
La función de la dirección asistida es ayudar al conductor a vencer esta fuerza.
A velocidades bajas se necesitan pares mayores para girar las ruedas, si la dirección genera más asistencia, el conductor debe aplicar menos fuerza sobre el volante, lo que resulta en un esfuerzo menor por parte del conductor.
Este último punto es un criterio subjetivo, ya que no todos los conductores tienen las mismas preferencias.
Niveles de asistencia bajos obligarán al conductor a un mayor esfuerzo, generalmente resultando en una conducción más incómoda o cansada.
Opción que se incluye por ejemplo en algunos modelos de Fiat Group Automobiles con denominación Dualdrive.
Tradicionalmente fueron el sistema habitual en toda clase de vehículos, aunque desde hace años están siendo sustituidas por las electro-hidráulicas y eléctricas.
Su funcionamiento puede variar dependiendo del fabricante, pero el modelo general unifica la cremallera con un cilindro hidráulico de doble efecto para generar la asistencia.
El sistema está tarado de modo que el desplazamiento del pistón ejerce aproximadamente el 80% de la fuerza necesaria para girar la dirección, siendo necesario que el conductor aplique la fuerza restante para mover la cremallera.
En este caso la bomba hidráulica solo funciona cuando y al ritmo que se necesita para operar la dirección.
La alimentación del motor que mueve la bomba se hace a través de la batería.
Su nombre se debe a que utilizan un motor eléctrico para generar la asistencia en la dirección.
Entre las ventajas que aporta, la mejora del comportamiento a alta velocidad parecía la más prometedora pues una dirección en ambos ejes permite un desplazamiento con una velocidad lateral de guiñada menor que en un vehículo normal.
Algunos fabricantes como Mazda, Toyota o Mitsubishi propusieron sistemas opcionales de accionamiento hidráulico, mientras que Honda permaneció fiel a un sistema totalmente mecánico capaz de adaptarse a la velocidad del vehículo.
El sistema permitía mediante un caculador electrónico y un servoactuador girar las ruedas traseras hasta 3,5º hasta los 60 km/h, velocidad a partir de la cual comenzaban a girar en el mismo sentido que las delanteras.