Filtro digital
Se le da la denominación de digital más por su funcionamiento interno que por su dependencia del tipo de señal a filtrar, así podríamos llamar filtro digital tanto a un filtro que realiza el procesado de señales digitales como a otro que lo haga de señales analógicas.
El procesamiento interno y la entrada del filtro serán digitales, por lo que puede ser necesario una conversión analógica-digital o digital-analógica para uso de filtros digitales con señales analógicas.
Entonces se puede extender esta información para calcular la respuesta del filtro a señales más complejas.
[1][2] Por ejemplo, dada una ecuación de diferencia, se establecería
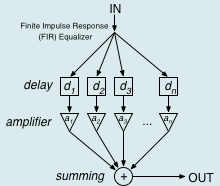
Los filtros digitales generalmente se consideran en dos categorías: respuesta de impulso infinito (IIR) y respuesta de impulso finito (FIR).
Esto se expresa de manera general con la siguiente igualdad: Al trazar la respuesta al impulso se revelará cómo responderá un filtro a una perturbación repentina y momentánea.
Aunque es posible que un filtro recursivo tenga una respuesta de impulso finita, los filtros no recursivos siempre tendrán una respuesta de impulso finita.
Con estas especificaciones, se elige un filtro FIR que puede ser diseñado manualmente o con computadora.
Mediante el software Matlab se obtienen los coeficientes que definen el filtro, que en la ecuación anterior se llaman a y b (el numerador es la variable b y el denominador solo tiene un término que es 1, como corresponde a un filtro FIR).
En la parte superior, se muestra la señal que se quiere filtrar y en la parte inferior la señal ya filtrada.El siguiente paso es seleccionar la forma de implementarlo, es decir su estructura.
Luego, se elige el hardware sobre el que funcionará, el cual, normalmente, es un Procesador digital de señal o un dispositivo programable FPGA, aunque también puede ser un programa de computador.
Finalmente se usan los coeficientes obtenidos y la estructura elegida para crear el programa bien sea en Matlab, o en cualquier otro lenguaje.