Par de módulos de aterrizaje y orbitadores de la NASA enviados a Marte en 1976
El programa Viking consistió en un par de sondas espaciales estadounidenses idénticas , Viking 1 y Viking 2 , que aterrizaron en Marte en 1976. [1] El esfuerzo de la misión comenzó en 1968 y fue administrado por el Centro de Investigación Langley de la NASA. [4] Cada nave espacial estaba compuesta por dos partes principales: un orbitador diseñado para fotografiar la superficie de Marte desde la órbita , y un módulo de aterrizaje diseñado para estudiar el planeta desde la superficie. Los orbitadores también sirvieron como relés de comunicación para los módulos de aterrizaje una vez que tocaron tierra.
El programa Viking surgió del programa anterior de la NASA , el Voyager Mars , aún más ambicioso , que no estaba relacionado con las exitosas sondas de espacio profundo Voyager de finales de los años 1970. El Viking 1 se lanzó el 20 de agosto de 1975, y la segunda nave, Viking 2 , se lanzó el 9 de septiembre de 1975, ambas a bordo de cohetes Titan IIIE con etapas superiores Centaur . El Viking 1 entró en la órbita de Marte el 19 de junio de 1976, y el Viking 2 lo siguió el 7 de agosto.
Después de orbitar Marte durante más de un mes y enviar imágenes que sirvieron para seleccionar el lugar de aterrizaje, los orbitadores y los módulos de aterrizaje se separaron; los módulos de aterrizaje entraron en la atmósfera marciana y realizaron un aterrizaje suave en los lugares que se habían elegido. El módulo de aterrizaje Viking 1 aterrizó en la superficie de Marte el 20 de julio de 1976, más de dos semanas antes de la llegada de Viking 2 a la órbita. El Viking 2 realizó un aterrizaje suave con éxito el 3 de septiembre. Los orbitadores continuaron tomando imágenes y realizando otras operaciones científicas desde la órbita mientras los módulos de aterrizaje desplegaban instrumentos en la superficie.
El costo del proyecto fue de aproximadamente 1.000 millones de dólares en el momento del lanzamiento, [5] [6] equivalente a unos 6.000 millones de dólares en dólares de 2023. [7] La misión se consideró exitosa y se le atribuye haber ayudado a formar la mayor parte del cuerpo de conocimientos sobre Marte a fines de la década de 1990 y principios de la década de 2000. [8] [9]
Objetivos científicos
Obtenga imágenes de alta resolución de la superficie marciana
Caracterizar la estructura y composición de la atmósfera y la superficie.
Los objetivos principales de los dos orbitadores Viking eran transportar los módulos de aterrizaje a Marte, realizar tareas de reconocimiento para localizar y certificar los lugares de aterrizaje, actuar como relés de comunicaciones para los módulos de aterrizaje y realizar sus propias investigaciones científicas. Cada orbitador, basado en la nave espacial Mariner 9 anterior , era un octógono de aproximadamente 2,5 m (8,2 pies) de ancho. El par orbitador-módulo de aterrizaje completamente cargado tenía una masa de 3527 kg (7776 lb). Después de la separación y el aterrizaje, el módulo de aterrizaje tenía una masa de aproximadamente 600 kg (1300 lb) y el orbitador 900 kg (2000 lb). La masa total de lanzamiento fue de 2328 kg (5132 lb), de los cuales 1445 kg (3186 lb) eran combustible y gas de control de actitud . Las ocho caras de la estructura en forma de anillo tenían 0,457 m (18 pulgadas) de alto y 1,397 y 0,508 m (55 y 20 pulgadas) de ancho, alternativamente. La altura total era de 3,29 m (10,8 pies) desde los puntos de sujeción del módulo de aterrizaje en la parte inferior hasta los puntos de sujeción del vehículo de lanzamiento en la parte superior. Había 16 compartimentos modulares, 3 en cada una de las 4 caras largas y uno en cada cara corta. Cuatro alas de paneles solares se extendían desde el eje del orbitador, la distancia de punta a punta de dos paneles solares extendidos en direcciones opuestas era de 9,75 m (32 pies).
Las comunicaciones se lograron a través de un transmisor de banda S de 20 W (2,3 GHz ) y dos TWTA de 20 W. También se agregó un enlace descendente de banda X (8,4 GHz) específicamente para la ciencia de la radio y para realizar experimentos de comunicaciones. El enlace ascendente se realizó a través de la banda S (2,1 GHz). Se colocó una antena parabólica orientable de dos ejes con un diámetro de aproximadamente 1,5 m en un borde de la base del orbitador, y una antena fija de baja ganancia se extendió desde la parte superior del bus. Dos grabadoras de cinta eran capaces de almacenar 1280 megabits cada una . También estaba disponible una radio de retransmisión de 381 MHz . [ cita requerida ]
Fuerza
La energía que alimentaba a los dos orbitadores era suministrada por ocho paneles solares de 1,57 m × 1,23 m (62 in × 48 in) , dos en cada ala. Los paneles solares comprendían un total de 34.800 células solares y producían 620 W de energía en Marte. La energía también se almacenaba en dos baterías de níquel-cadmio de 30 A·h .
El área combinada de los cuatro paneles era de 15 metros cuadrados (160 pies cuadrados) y proporcionaban energía de corriente continua tanto regulada como no regulada; la energía no regulada se suministraba al transmisor de radio y al módulo de aterrizaje.
Dos baterías recargables de níquel-cadmio de 30 amperios·hora proporcionaron energía cuando la nave espacial no estaba orientada al Sol, durante el lanzamiento, mientras realizaba maniobras de corrección y también durante la ocultación de Marte. [10]
Principales hallazgos
Mosaico de imágenes de Marte tomadas por el orbitador Viking 1
Al descubrir muchas formas geológicas que se forman típicamente a partir de grandes cantidades de agua, las imágenes de los orbitadores provocaron una revolución en nuestras ideas sobre el agua en Marte . Se encontraron enormes valles fluviales en muchas áreas. Mostraron que las inundaciones de agua rompieron presas, excavaron valles profundos, erosionaron surcos en el lecho de roca y viajaron miles de kilómetros. Grandes áreas en el hemisferio sur contenían redes de arroyos ramificados, lo que sugiere que alguna vez cayó lluvia. Se cree que los flancos de algunos volcanes han estado expuestos a la lluvia porque se parecen a los causados en los volcanes hawaianos. Muchos cráteres parecen como si el impactador cayera en el barro. Cuando se formaron, el hielo en el suelo puede haberse derretido, convirtiendo el suelo en barro y luego fluyendo por la superficie. Normalmente, el material de un impacto sube y luego baja. No fluye por la superficie, rodeando obstáculos, como lo hace en algunos cráteres marcianos. [11] [12] [13] Las regiones llamadas " Terreno Caótico " parecen haber perdido rápidamente grandes volúmenes de agua, lo que provocó la formación de grandes canales. Se estima que la cantidad de agua involucrada es diez mil veces mayor que el caudal del río Misisipi . [14] El vulcanismo subterráneo puede haber derretido el hielo congelado; luego, el agua fluyó y el suelo se derrumbó para dejar un terreno caótico.
Mosaicos vikingos
Las islas aerodinámicas muestran que se produjeron grandes inundaciones en Marte. ( Cuadrilátero Lunae Palus )
Los patrones de erosión fueron producidos por el flujo de agua. El cráter Dromore se encuentra en la parte inferior. ( Cuadrilátero Lunae Palus )
Grandes inundaciones de agua probablemente erosionaron los canales alrededor del cráter Dromore . ( Cuadrilátero Lunae Palus )
El cráter Arandas podría estar sobre grandes cantidades de hielo de agua, que se derritió cuando se produjo el impacto, produciendo un material eyectado similar al barro. ( Cuadro del Mare Acidalium )
Artículo de prueba del módulo de aterrizaje VikingEl astrónomo Carl Sagan se encuentra junto a un modelo de un módulo de aterrizaje Viking para proporcionar una imagen a escala.
Cada módulo de aterrizaje estaba compuesto por una base de aluminio de seis lados con lados alternos de 1,09 y 0,56 m (43 y 22 pulgadas) de largo, sostenida por tres patas extendidas unidas a los lados más cortos. Las almohadillas de las patas formaban los vértices de un triángulo equilátero con lados de 2,21 m (7,3 pies) cuando se miraba desde arriba, con los lados largos de la base formando una línea recta con las dos almohadillas adyacentes. La instrumentación estaba unida dentro y encima de la base, elevada sobre la superficie por las patas extendidas. [15]
Cada módulo de aterrizaje estaba encerrado en un escudo térmico aerodinámico diseñado para reducir la velocidad del módulo de aterrizaje durante la fase de entrada. Para evitar la contaminación de Marte por organismos terrestres, cada módulo de aterrizaje, una vez ensamblado y encerrado dentro del escudo aerodinámico, se encerró en un "bioescudo" presurizado y luego se esterilizó a una temperatura de 111 °C (232 °F) durante 40 horas. Por razones térmicas, la tapa del bioescudo se desprendió después de que la etapa superior Centaur impulsara la combinación de orbitador/módulo de aterrizaje Viking fuera de la órbita terrestre. [16]
El astrónomo Carl Sagan ayudó a elegir los lugares de aterrizaje para ambas sondas Viking . [17]
Entrada, descenso y aterrizaje (EDL)
Cada módulo de aterrizaje llegó a Marte acoplado al orbitador. El conjunto orbitó Marte muchas veces antes de que el módulo de aterrizaje fuera liberado y separado del orbitador para descender a la superficie. El descenso comprendió cuatro fases distintas, comenzando con un encendido de desorbitación . Luego, el módulo de aterrizaje experimentó la entrada en la atmósfera con un calentamiento máximo que se produjo unos segundos después del inicio del calentamiento por fricción con la atmósfera marciana. A una altitud de aproximadamente 6 kilómetros (3,7 millas) y viajando a una velocidad de 900 kilómetros por hora (600 mph), se desplegó el paracaídas, se soltó la cubierta aerodinámica y se desplegaron las patas del módulo de aterrizaje. A una altitud de aproximadamente 1,5 kilómetros (5000 pies), el módulo de aterrizaje activó sus tres retromotores y fue liberado del paracaídas. Luego, el módulo de aterrizaje utilizó inmediatamente retrocohetes para frenar y controlar su descenso, con un aterrizaje suave en la superficie de Marte. [18]
Primera imagen "clara" jamás transmitida desde la superficie de Marte: muestra rocas cerca del módulo de aterrizaje Viking 1 (20 de julio de 1976).
Al aterrizar (después de utilizar el propulsor del cohete), los módulos de aterrizaje tenían una masa de aproximadamente 600 kg.
Propulsión
La propulsión para la salida de órbita se realizó mediante el monopropelente hidracina ( N2H4 ), a través de un cohete con 12 toberas dispuestas en cuatro grupos de tres que proporcionaban un empuje de 32 newtons (7,2 lbf ) , lo que se traducía en un cambio de velocidad de 180 m/s (590 ft/s). Estas toberas también actuaban como propulsores de control para la traslación y rotación del módulo de aterrizaje.
El descenso terminal (después del uso de un paracaídas ) y el aterrizaje utilizaron tres motores monopropulsantes de hidracina (uno fijado en cada lado largo de la base, separados por 120 grados). Los motores tenían 18 toberas para dispersar el escape y minimizar los efectos sobre el suelo, y eran regulables de 276 a 2667 newtons (62 a 600 lbf ) . La hidracina se purificó para evitar la contaminación de la superficie marciana con microbios terrestres . El módulo de aterrizaje llevaba 85 kg (187 lb) de propulsor en el lanzamiento, contenido en dos tanques esféricos de titanio montados en lados opuestos del módulo de aterrizaje debajo de los parabrisas RTG, lo que dio una masa total de lanzamiento de 657 kg (1448 lb). El control se logró mediante el uso de una unidad de referencia inercial , cuatro giroscopios , un altímetro de radar , un radar de descenso y aterrizaje terminal y los propulsores de control.
Fuerza
La energía era proporcionada por dos unidades de generador termoeléctrico de radioisótopos (RTG) que contenían plutonio-238, fijadas a lados opuestos de la base del módulo de aterrizaje y cubiertas por pantallas antiviento. Cada RTG Viking [19] tenía 28 cm (11 pulgadas) de alto, 58 cm (23 pulgadas) de diámetro, tenía una masa de 13,6 kg (30 libras) y proporcionaba 30 vatios de energía continua a 4,4 voltios. También había a bordo cuatro baterías recargables de níquel-cadmio selladas de celda húmeda de 8 Ah (28.800 culombios ) y 28 voltios para manejar las cargas de energía máxima.
Carga útil
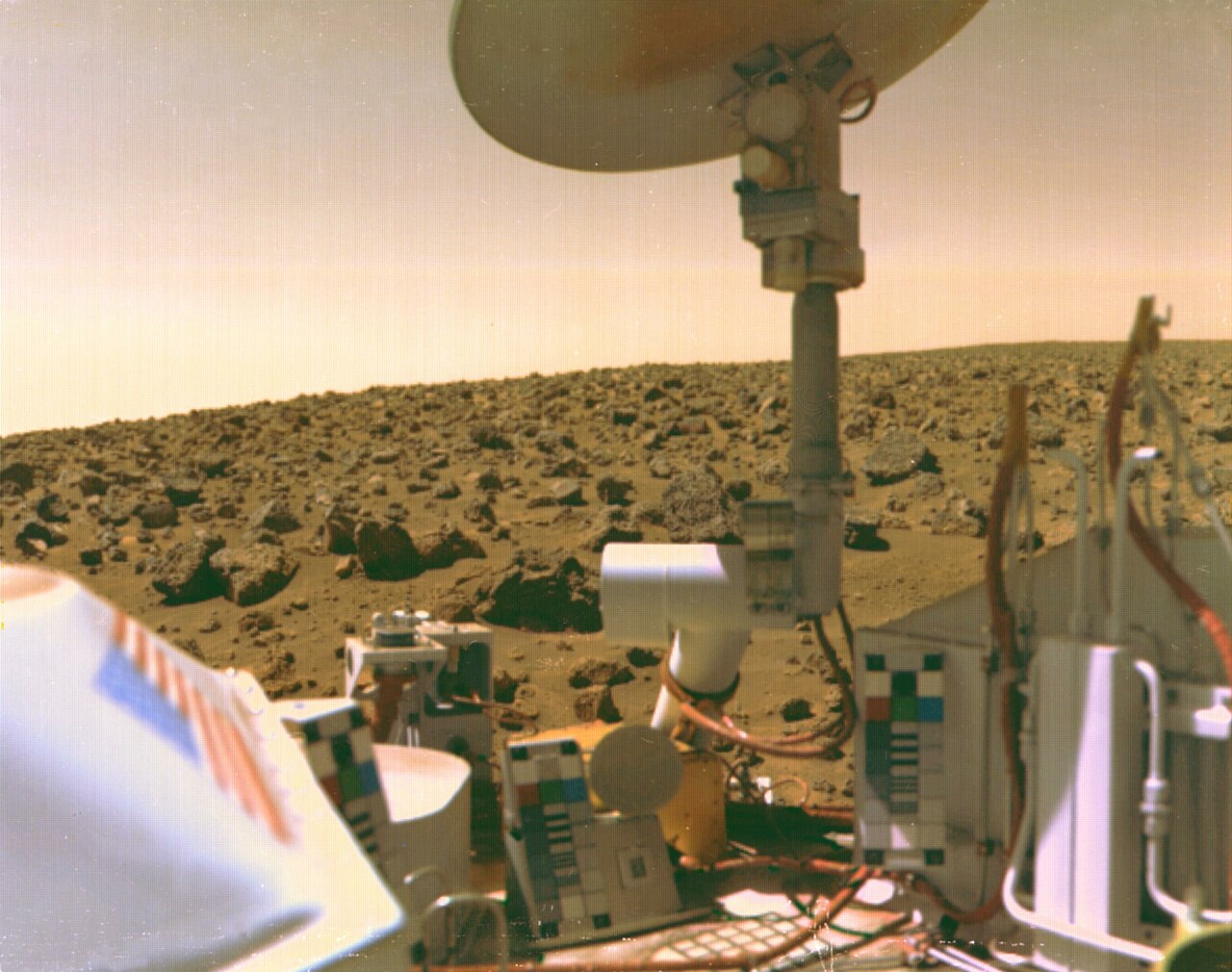
Imagen de Marte tomada por el módulo de aterrizaje Viking 2
Comunicaciones
Las comunicaciones se lograron a través de un transmisor de banda S de 20 vatios que utilizaba dos tubos de ondas viajeras . Una antena parabólica de alta ganancia y orientable de dos ejes estaba montada en un brazo cerca de un borde de la base del módulo de aterrizaje. Una antena omnidireccional de banda S de baja ganancia también se extendía desde la base. Ambas antenas permitían la comunicación directa con la Tierra, lo que permitió que el Viking 1 continuara funcionando mucho después de que ambos orbitadores hubieran fallado. Una antena UHF (381 MHz) proporcionó un relé unidireccional al orbitador utilizando una radio de relé de 30 vatios. El almacenamiento de datos se realizaba en una grabadora de cinta de 40 Mbit, y la computadora del módulo de aterrizaje tenía una memoria de 6000 palabras para las instrucciones de comando.
Instrumentos
El módulo de aterrizaje llevaba instrumentos para lograr los principales objetivos científicos de la misión: estudiar la biología , la composición química ( orgánica e inorgánica ), la meteorología , la sismología , las propiedades magnéticas , la apariencia y las propiedades físicas de la superficie y la atmósfera marcianas. Se montaron dos cámaras de escaneo cilíndricas de 360 grados cerca de un lado largo de la base. Desde el centro de este lado se extendía el brazo muestreador, con un cabezal colector, un sensor de temperatura y un imán en el extremo. Un brazo meteorológico , que contenía sensores de temperatura, dirección del viento y velocidad del viento, se extendía hacia afuera y hacia arriba desde la parte superior de una de las patas del módulo de aterrizaje. Un sismómetro , un imán y objetivos de prueba de cámara y un espejo de aumento están montados frente a las cámaras, cerca de la antena de alta ganancia. Un compartimento interior ambientalmente controlado contenía el experimento de biología y el espectrómetro de masas del cromatógrafo de gases . El espectrómetro de fluorescencia de rayos X también estaba montado dentro de la estructura. Se adjuntó un sensor de presión debajo del cuerpo del módulo de aterrizaje. La carga útil científica tenía una masa total de aproximadamente 91 kg (201 lb).
Experimentos biológicos
Las sondas Viking realizaron experimentos biológicos diseñados para detectar vida en el suelo marciano (si es que existía) con experimentos diseñados por tres equipos separados, bajo la dirección del científico jefe Gerald Soffen de la NASA. Un experimento resultó positivo para la detección del metabolismo (vida actual), pero basándose en los resultados de los otros dos experimentos que no revelaron ninguna molécula orgánica en el suelo, la mayoría de los científicos se convencieron de que los resultados positivos probablemente se debían a reacciones químicas no biológicas de condiciones de suelo altamente oxidantes. [20]
Aunque hubo un pronunciamiento de la NASA durante la misión diciendo que los resultados del módulo de aterrizaje Viking no demostraron biofirmas concluyentes en los suelos de los dos sitios de aterrizaje, los resultados de la prueba y sus limitaciones aún están bajo evaluación. La validez de los resultados positivos de 'Liberación etiquetada' (LR) dependía completamente de la ausencia de un agente oxidante en el suelo marciano, pero uno fue descubierto más tarde por el módulo de aterrizaje Phoenix en forma de sales de perclorato . [21] [22] Se ha propuesto que los compuestos orgánicos podrían haber estado presentes en el suelo analizado tanto por Viking 1 como por Viking 2 , pero pasaron desapercibidos debido a la presencia de perclorato, como lo detectó Phoenix en 2008. [23] Los investigadores descubrieron que el perclorato destruirá los compuestos orgánicos cuando se caliente y producirá clorometano y diclorometano , los compuestos de cloro idénticos descubiertos por ambos módulos de aterrizaje Viking cuando realizaron las mismas pruebas en Marte. [24]
La cuestión de la vida microbiana en Marte sigue sin resolverse. No obstante, el 12 de abril de 2012, un equipo internacional de científicos informó sobre estudios basados en especulaciones matemáticas a través del análisis de la complejidad de los experimentos de liberación etiquetada de la misión Viking de 1976, que podrían sugerir la detección de "vida microbiana existente en Marte". [25] [26] Además, en 2018 se publicaron nuevos hallazgos de un nuevo examen de los resultados del cromatógrafo de gases y espectrómetro de masas (GCMS). [27]
Sistema de cámara/imagen
El líder del equipo de imágenes fue Thomas A. Mutch , un geólogo de la Universidad Brown en Providence, Rhode Island . La cámara utiliza un espejo móvil para iluminar 12 fotodiodos . Cada uno de los 12 diodos de silicio está diseñado para ser sensible a diferentes frecuencias de luz.
Se colocaron varios diodos de banda ancha (designados BB1, BB2, BB3 y BB4) para enfocar con precisión a distancias entre seis y 43 pies del módulo de aterrizaje. [28] Un diodo de banda ancha de baja resolución se denominó SURVEY. [28] También hay tres diodos de banda estrecha de baja resolución (denominados BLUE, GREEN y RED) para obtener imágenes en color , y otros tres (IR1, IR2 e IR3) para imágenes infrarrojas . [28]
Las cámaras escaneaban a una velocidad de cinco líneas verticales por segundo, cada una compuesta de 512 píxeles. Las imágenes panorámicas de 300 grados estaban compuestas por 9150 líneas. El escaneo de las cámaras era lo suficientemente lento como para que en una fotografía tomada por el equipo durante el desarrollo del sistema de imágenes varios miembros aparecieran varias veces en la toma mientras se movían mientras la cámara escaneaba. [29] [30]
Desglose masivo de los módulos de aterrizaje Viking
Los aterrizadores Viking utilizaron un ordenador de guía, control y secuenciación (GCSC) compuesto por dos ordenadores Honeywell HDC 402 de 24 bits con 18K de memoria de cable chapado , mientras que los orbitadores Viking utilizaron un subsistema de ordenador de comando (CCS) utilizando dos procesadores seriales de 18 bits diseñados a medida. [32] [33] [34]
Costo financiero del programa Viking
Los dos orbitadores costaron 217 millones de dólares en ese momento, lo que equivale a unos 1.000 millones de dólares en dólares de 2023. [35] [36] La parte más cara del programa fue la unidad de detección de vida del módulo de aterrizaje, que costó unos 60 millones de dólares en ese momento o 400 millones de dólares en dólares de 2023. [35] [36] El desarrollo del diseño del módulo de aterrizaje Viking costó 357 millones de dólares. [35] Esto fue décadas antes del enfoque "más rápido, mejor, más barato" de la NASA, y Viking necesitaba ser pionera en tecnologías sin precedentes bajo la presión nacional provocada por la Guerra Fría y las secuelas de la carrera espacial , todo bajo la perspectiva de posiblemente descubrir vida extraterrestre por primera vez. [35] Los experimentos tuvieron que adherirse a una directiva especial de 1971 que ordenaba que ningún fallo individual detuviera el regreso de más de un experimento, una tarea difícil y costosa para un dispositivo con más de 40.000 piezas. [35]
El sistema de cámara Viking costó 27,3 millones de dólares para desarrollarse, o alrededor de 200 millones de dólares en dólares de 2023. [35] [36] Cuando se completó el diseño del sistema de imágenes, fue difícil encontrar a alguien que pudiera fabricar su diseño avanzado. [35] Los administradores del programa fueron elogiados más tarde por defenderse de la presión para optar por un sistema de imágenes más simple y menos avanzado, especialmente cuando las vistas se acumularon. [35] Sin embargo, el programa ahorró algo de dinero al eliminar un tercer módulo de aterrizaje y reducir el número de experimentos en el módulo de aterrizaje. [35]
En total, la NASA afirma que se gastaron en el programa 1.000 millones de dólares de la década de 1970, [5] [6] lo que, ajustado a la inflación en dólares de 2023, supone unos 6.000 millones de dólares. [36]
Fin de la misión
Al final, todas las naves fracasaron, una por una, de la siguiente manera: [1]
El programa Viking finalizó el 21 de mayo de 1983. Para evitar un impacto inminente con Marte, la órbita del orbitador Viking 1 se elevó el 7 de agosto de 1980, antes de ser desactivada 10 días después. El impacto y la posible contaminación de la superficie del planeta son posibles a partir de 2019. [5]
En diciembre de 2006, el Mars Reconnaissance Orbiter descubrió que el módulo de aterrizaje Viking 1 se encontraba a unos 6 kilómetros de su sitio de aterrizaje planificado. [37]
Artefacto de mensaje
Cada módulo de aterrizaje Viking llevaba un pequeño punto de microfilm que contenía los nombres de varios miles de personas que habían trabajado en la misión. [38] Varias sondas espaciales anteriores habían llevado artefactos con mensajes, como la placa Pioneer y el Disco de Oro de la Voyager . Las sondas posteriores también llevaban monumentos o listas de nombres, como el rover Perseverance que reconoce a los casi 11 millones de personas que se inscribieron para incluir sus nombres en la misión.
^ abcdefghij Williams, David R. Dr. (18 de diciembre de 2006). «Viking Mission to Mars». NASA . Archivado desde el original el 6 de diciembre de 2023. Consultado el 2 de febrero de 2014 .
^ Nelson, Jon. «Viking 1». JPL . Archivado desde el original el 24 de octubre de 2023. Consultado el 2 de febrero de 2014 .
^ Nelson, Jon. «Viking 2». JPL . Archivado desde el original el 8 de octubre de 2023. Consultado el 2 de febrero de 2014 .
^ Soffen, GA (julio-agosto de 1978). "Marte y los notables resultados de la sonda Viking". Journal of Spacecraft and Rockets . 15 (4): 193-200.
^ ab Howell, Elizabeth (26 de octubre de 2012). «Viking 1: First US Lander on Mars». Space.com . Archivado desde el original el 6 de septiembre de 2023. Consultado el 13 de diciembre de 2016 .
^ Johnston, Louis; Williamson, Samuel H. (2023). "¿Cuál era el PIB de Estados Unidos en ese momento?". MeasuringWorth . Consultado el 30 de noviembre de 2023 .Las cifras del deflactor del producto interno bruto de Estados Unidos siguen la serie de MeasuringWorth .
^ "El Programa Vikingo". Centro de Ciencias Planetarias. Archivado desde el original el 20 de noviembre de 2023. Consultado el 13 de abril de 2018 .
^ "Viking Lander". California Science Center . 3 de julio de 2014. Archivado desde el original el 27 de mayo de 2023. Consultado el 13 de abril de 2018 .
^ "Hoja informativa sobre el Viking" (PDF) . Laboratorio de Propulsión a Chorro . Archivado desde el original (PDF) el 10 de marzo de 2012 . Consultado el 27 de marzo de 2012 .
^ Kieffer, Hugh H.; Jakosky, Bruce M.; Snyder, Conway W.; Matthews, Mildred S., eds. (1992). Marte. Prensa de la Universidad de Arizona . ISBN978-0-8165-1257-7. LCCN 92010951 . Consultado el 7 de marzo de 2011 .
^ Moore, Patrick; Hunt, Garry; Nicolson, Iain; Cattermole, Peter (1990). Garlick, Judy (ed.). Atlas del sistema solar. Mitchell Beazley . ISBN0-86134-125-2.
^ Morton, Oliver (2002). Mapeo de Marte: ciencia, imaginación y el nacimiento de un mundo. Picador . ISBN0-312-24551-3.
^ Hearst Magazines (junio de 1976). "Amazing Search for Life On Mars" (La sorprendente búsqueda de vida en Marte). Popular Mechanics . Hearst Magazines. págs. 61–63.
^ Soffen, GA; Snyder, CW (27 de agosto de 1976). «La primera misión Viking a Marte». Science . 193 (4255): 759–766. Bibcode :1976Sci...193..759S. doi :10.1126/science.193.4255.759. PMID 17747776. Archivado desde el original el 11 de febrero de 2023 . Consultado el 21 de diciembre de 2023 .
^ Kragh, Helge. «Carl Sagan». Encyclopædia Britannica . Archivado desde el original el 8 de noviembre de 2023. Consultado el 9 de agosto de 2022 .
^ "Vikingo". astro.if.ufrgs.br . Archivado desde el original el 13 de agosto de 2023.
^ "Ficha técnica del generador termoeléctrico de radioisótopos SNAP-19 de la Administración de Investigación y Desarrollo Energético (ERDA) Diagrama 2 - Administración de Investigación y Desarrollo Energético". Google Arts & Culture . Consultado el 9 de agosto de 2022 .
^ BEEGLE, LUTHER W.; et al. (agosto de 2007). "Un concepto para el laboratorio de campo de astrobiología de la NASA para Marte en 2016". Astrobiología . 7 (4): 545–577. Bibcode :2007AsBio...7..545B. doi :10.1089/ast.2007.0153. PMID 17723090.
^ Johnson, John (6 de agosto de 2008). "Se encontró perclorato en suelo marciano". Los Angeles Times . Archivado desde el original el 19 de abril de 2023.
^ "¿Vida en Marte o no? El equipo Phoenix de la NASA analiza los resultados". Science Daily . 6 de agosto de 2008. Archivado desde el original el 18 de noviembre de 2023.
^ Navarro–Gonzáles, Rafael; Edgar Vargas; José de la Rosa; Alejandro C. Raga; Christopher P. McKay (15 de diciembre de 2010). «Reanalysis of the Viking results suggests perchlorate and organics at midlatitudes on Mars» (Un nuevo análisis de los resultados de Viking sugiere la presencia de perclorato y compuestos orgánicos en latitudes medias de Marte). Journal of Geophysical Research: Planets ( Revista de investigación geofísica: planetas). Vol. 115, núm. E12010. Archivado desde el original el 9 de enero de 2011. Consultado el 7 de enero de 2011 .
^ Than, Ker (15 de abril de 2012). «La misión Viking de la NASA descubre vida en Marte». National Geographic . Archivado desde el original el 15 de abril de 2012. Consultado el 13 de abril de 2018 .
^ Bianciardi, Giorgio; Miller, Joseph D.; Straat, Patricia Ann; Levin, Gilbert V. (marzo de 2012). "Análisis de complejidad de los experimentos de liberación marcada de Viking". IJASS . 13 (1): 14–26. Bibcode :2012IJASS..13...14B. doi : 10.5139/IJASS.2012.13.1.14 .
^ Klotz, Irene (12 de abril de 2012). "Los robots Viking de Marte encontraron vida". DiscoveryNews . Consultado el 16 de abril de 2012 .
^ Guzman, Melissa; McKay, Christopher P.; Quinn, Richard C.; Szopa, Cyril; Davila, Alfonso F.; Navarro-González, Rafael; Freissinet, Caroline (2018). "Identificación de clorobenceno en los conjuntos de datos del cromatógrafo de gases y espectrómetro de masas Viking: reanálisis de los datos de la misión Viking consistentes con compuestos orgánicos aromáticos en Marte" (PDF) . Journal of Geophysical Research: Planets . 123 (7): 1674–1683. Bibcode :2018JGRE..123.1674G. doi :10.1029/2018JE005544. ISSN 2169-9100. S2CID 133854625. Archivado (PDF) desde el original el 3 de noviembre de 2020.
^ abc «PDS: Información del instrumento». pds.nasa.gov . Consultado el 28 de marzo de 2023 .
^ El equipo de imágenes del módulo de aterrizaje Viking (1978). "Capítulo 8: Cámaras sin imágenes". El paisaje marciano . NASA. pág. 22.
^ McElheny, Victor K. (21 de julio de 1976). «Las cámaras Viking son ligeras, consumen poca energía y funcionan lentamente». The New York Times . Archivado desde el original el 22 de febrero de 2021. Consultado el 28 de septiembre de 2013 .
^ "Mars Lander Retro Propulsion (IAF-99-S.2.02)" . Consultado el 14 de mayo de 2024 .
^ Tomayko, James (marzo de 1988). Computers in Spaceflight: The NASA Experience (Informe técnico). NASA . CR-182505. Archivado desde el original el 6 de mayo de 2023. Consultado el 6 de febrero de 2010 .
^ Holmberg, Neil A.; Robert P. Faust; H. Milton Holt (noviembre de 1980). «NASA Reference Publication 1027: Viking '75 spacecraft design and test summary. Volume 1 – Lander design» (PDF) . NASA . Consultado el 6 de febrero de 2010 .
^ Holmberg, Neil A.; Robert P. Faust; H. Milton Holt (noviembre de 1980). «NASA Reference Publication 1027: Viking '75 spacecraft design and test summary. Volume 2 – Orbiter design» (PDF) . NASA . Consultado el 6 de febrero de 2010 .
^ abcdefghi McCurdy, Howard E. (2001). Más rápido, mejor, más barato: innovación de bajo costo en el programa espacial de Estados Unidos. JHU Press. pág. 68. ISBN978-0-8018-6720-0.
^ abcd Como el programa Viking fue un gasto del gobierno, para el cálculo del ajuste por inflación se utiliza el índice de inflación del Producto Interno Bruto Nominal per cápita de los Estados Unidos .
^ Chandler, David (5 de diciembre de 2006). «La potente cámara de la sonda detecta vikingos en Marte». New Scientist . Consultado el 8 de octubre de 2013 .
^ "Visiones de Marte: ayer y hoy". The Planetary Society .
Lectura adicional
En Marte: exploración del planeta rojo Archivado el 5 de febrero de 2007 en Wayback Machine
Vistas de Marte desde la sonda Viking Orbiter
El paisaje marciano SP-425
Artículo destacado de Química Analítica sobre la misión científica de la nave espacial Viking
Resumen del diseño y las pruebas de la nave espacial Viking '75. Volumen 1 Diseño del módulo de aterrizaje – Informe de la NASA Archivado el 27 de octubre de 2020 en Wayback Machine
Resumen del diseño y las pruebas de la nave espacial Viking '75. Volumen 2 Diseño del orbitador – Informe de la NASA Archivado el 27 de octubre de 2020 en Wayback Machine
Resumen del diseño y las pruebas de la nave espacial Viking '75. Volumen 3 Resumen de las pruebas de ingeniería – Informe de la NASA Archivado el 28 de octubre de 2020 en Wayback Machine
Enlaces externos
Wikimedia Commons alberga una categoría multimedia sobre Misión vikinga .
Misión Viking de la NASA a Marte Archivado el 23 de febrero de 2007 en Wayback Machine
Misión Viking a Marte (NASA SP-334) Archivado el 7 de agosto de 2013 en Wayback Machine
Hoja informativa del proyecto Solar Views Viking
Misión Viking a Marte Archivado el 16 de julio de 2011 en Wayback Machine Vídeo
Diagrama del Viking y su perfil de vuelo.
Artículo en el sitio web del Instituto Smithsoniano del Aire y el Espacio
Proyecto de educación y preservación de las misiones Viking a Marte (VMMEPP)

















{kind=link}
{kind=link}
{kind=link}