En geometría euclidiana tridimensional , si dos líneas no están en el mismo plano , no tienen punto de intersección [ cita necesaria ] y se llaman líneas oblicuas . Sin embargo, si están en el mismo plano, hay tres posibilidades: si coinciden (no son líneas distintas), tienen una infinidad de puntos en común (es decir, todos los puntos de cualquiera de ellas); si son distintos pero tienen la misma pendiente , se dice que son paralelos y no tienen puntos en común; en caso contrario, tienen un único punto de intersección.
Las características distintivas de la geometría no euclidiana son el número y la ubicación de posibles intersecciones entre dos líneas y el número de líneas posibles sin intersecciones (líneas paralelas) con una línea dada. [ Se necesita más explicación ]
Fórmulas
Una condición necesaria para que dos líneas se crucen es que estén en el mismo plano, es decir, que no sean líneas sesgadas. El cumplimiento de esta condición equivale a que el tetraedro con vértices en dos de los puntos de una recta y dos de los puntos de la otra recta sea degenerado en el sentido de tener volumen cero . Para conocer la forma algebraica de esta condición, consulte Líneas sesgadas § Prueba de asimetría .
Dados dos puntos en cada recta
Primero consideramos la intersección de dos líneas L 1 y L 2 en un espacio bidimensional, con la línea L 1 definida por dos puntos distintos ( x 1 , y 1 ) y ( x 2 , y 2 ) , y la línea L 2 siendo definido por dos puntos distintos ( x 3 , y 3 ) y ( x 4 , y 4 ) . [1]
La intersección P de las líneas L 1 y L 2 se puede definir usando determinantes .
Los determinantes se pueden escribir como:
Cuando las dos rectas son paralelas o coincidentes, el denominador es cero.
Dados dos puntos en cada segmento de recta
El punto de intersección anterior es para las líneas infinitamente largas definidas por los puntos, en lugar de los segmentos de línea entre los puntos, y puede producir un punto de intersección que no esté contenido en ninguno de los dos segmentos de línea. Para encontrar la posición de la intersección con respecto a los segmentos de línea, podemos definir las líneas L 1 y L 2 en términos de parámetros Bézier de primer grado:
(donde t y u son números reales). El punto de intersección de las rectas se encuentra con uno de los siguientes valores de t o u , donde
y
con
Habrá una intersección si 0 ≤ t ≤ 1 y 0 ≤ u ≤ 1 . El punto de intersección cae dentro del primer segmento de línea si 0 ≤ t ≤ 1 , y cae dentro del segundo segmento de línea si 0 ≤ u ≤ 1 . Estas desigualdades se pueden probar sin necesidad de división, lo que permite determinar rápidamente la existencia de cualquier intersección de segmentos de línea antes de calcular su punto exacto. [2]
Dadas dos ecuaciones lineales
Las coordenadas xey del punto de intersección de dos líneas no verticales se pueden encontrar fácilmente utilizando las siguientes sustituciones y reordenamientos.
Supongamos que dos rectas tienen las ecuaciones y = ax + c e y = bx + d donde a y b son las pendientes (gradientes) de las rectas y donde c y d son las intersecciones en y de las rectas. En el punto donde las dos líneas se cruzan (si lo hacen), ambas coordenadas y serán iguales, de ahí la siguiente igualdad:
Podemos reorganizar esta expresión para extraer el valor de x ,
y entonces,
Para encontrar la coordenada y , todo lo que tenemos que hacer es sustituir el valor de x en cualquiera de las dos ecuaciones lineales, por ejemplo, en la primera:
Por tanto, el punto de intersección es
Tenga en cuenta que si a = b entonces las dos rectas son paralelas . Si c ≠ d también, las rectas son diferentes y no hay intersección, de lo contrario las dos rectas son idénticas y se cruzan en todos los puntos.
Usando coordenadas homogéneas
Al utilizar coordenadas homogéneas , el punto de intersección de dos líneas definidas implícitamente se puede determinar con bastante facilidad. En 2D, cada punto se puede definir como una proyección de un punto 3D, dado como el triple ordenado ( x , y , w ) . El mapeo de coordenadas 3D a 2D es ( x ′, y ′) = (X/w,y/w) . Podemos convertir puntos 2D en coordenadas homogéneas definiéndolas como ( x , y , 1) .
Supongamos que queremos encontrar la intersección de dos líneas infinitas en un espacio bidimensional, definido como a 1 x + b 1 y + c 1 = 0 y a 2 x + b 2 y + c 2 = 0 . Podemos representar estas dos líneas en coordenadas de línea como U 1 = ( a 1 , b 1 , c 1 ) y U 2 = ( a 2 , b 2 , c 2 ) . La intersección P ′ de dos líneas viene dada simplemente por [3]
Si c p = 0 , las líneas no se cruzan.
Más de dos líneas
La intersección de dos líneas se puede generalizar para involucrar líneas adicionales. La existencia y expresión del problema de intersección de n líneas son las siguientes.
En dos dimensiones
En dos dimensiones, es casi seguro que más de dos líneas no se cruzan en un solo punto. Para determinar si lo hacen y, de ser así, encontrar el punto de intersección, escriba la i -ésima ecuación ( i = 1,…, n ) como
y apilar estas ecuaciones en forma matricial como
donde la i- ésima fila de la matriz A de n × 2 es [ a i 1 , a i 2 ] , w es el vector 2 × 1 [x y] , y eliésimo elemento del vector columna b es b i . Si A tiene columnas independientes, surangoes 2. Entonces si y solo si el rango de lamatriz aumentada[ A | b ]también es 2, existe una solución de la ecuación matricial y por tanto un punto de intersección de lasnrectas. El punto de intersección, si existe, viene dado por
donde Ag es la inversa generalizada de Moore-Penrose de A (que tiene la forma que se muestra porque A tiene rango de columna completo). Alternativamente, la solución se puede encontrar resolviendo conjuntamente dos ecuaciones independientes cualesquiera. Pero si el rango de A es solo 1, entonces si el rango de la matriz aumentada es 2 no hay solución, pero si su rango es 1 entonces todas las líneas coinciden entre sí.
En tres dimensiones
El enfoque anterior puede extenderse fácilmente a tres dimensiones. En tres o más dimensiones, es casi seguro que ni siquiera dos líneas se cruzan; Los pares de rectas no paralelas que no se cruzan se llaman rectas sesgadas . Pero si existe una intersección, se puede encontrar de la siguiente manera.
En tres dimensiones una recta está representada por la intersección de dos planos, cada uno de los cuales tiene una ecuación de la forma
Por lo tanto, un conjunto de n líneas puede representarse mediante 2 n ecuaciones en el vector de coordenadas tridimensional w :
donde ahora A es 2 n × 3 y b es 2 n × 1 . Como antes, existe un punto de intersección único si y sólo si A tiene el rango de columna completo y la matriz aumentada [ A | b ] no lo hace, y la intersección única, si existe, está dada por
Puntos más cercanos para sesgar líneas
PQ, la distancia más corta entre dos líneas oblicuas AB y CD es perpendicular tanto a AB como a CD
En dos o más dimensiones, normalmente podemos encontrar un punto que sea mutuamente más cercano a dos o más líneas en el sentido de mínimos cuadrados .
En dos dimensiones
En el caso bidimensional, primero, represente la línea i como un punto p i en la línea y un vector unitario normal n̂ i , perpendicular a esa línea. Es decir, si x 1 y x 2 son puntos en la línea 1, entonces sea p 1 = x 1 y sea
que es el vector unitario a lo largo de la recta, girado en ángulo recto.
La distancia desde un punto x a la recta ( p , n̂ ) está dada por
Y entonces la distancia al cuadrado desde un punto x a una recta es
La suma de las distancias al cuadrado de muchas líneas es la función de costo :
Esto se puede reorganizar:
Para encontrar el mínimo, derivamos con respecto a x e igualamos el resultado al vector cero:
entonces
y entonces
En más de dos dimensiones
Si bien n̂ i no está bien definido en más de dos dimensiones, esto se puede generalizar a cualquier número de dimensiones observando que n̂ i n̂ i T es simplemente la matriz simétrica con todos los valores propios uno, excepto un valor propio cero en la dirección a lo largo de la línea que proporciona una seminorma sobre la distancia entre p i y otro punto que da la distancia a la línea. En cualquier número de dimensiones, si v̂ i es un vector unitario a lo largo de la i- ésima línea, entonces
Para encontrar el punto de intersección de un conjunto de líneas, calculamos el punto con la distancia mínima a ellas. Cada línea está definida por un origen a i y un vector de dirección unitario n̂ i . El cuadrado de la distancia desde un punto p a una de las rectas lo da Pitágoras:
donde ( p − a i ) T n̂ i es la proyección de p − a i en la línea i . La suma de las distancias al cuadrado de todas las rectas es
Para minimizar esta expresión, la diferenciamos con respecto a p .
lo que resulta en
donde I es la matriz identidad . Esta es una matriz Sp = C , con solución p = S + C , donde S + es la pseudoinversa de S .
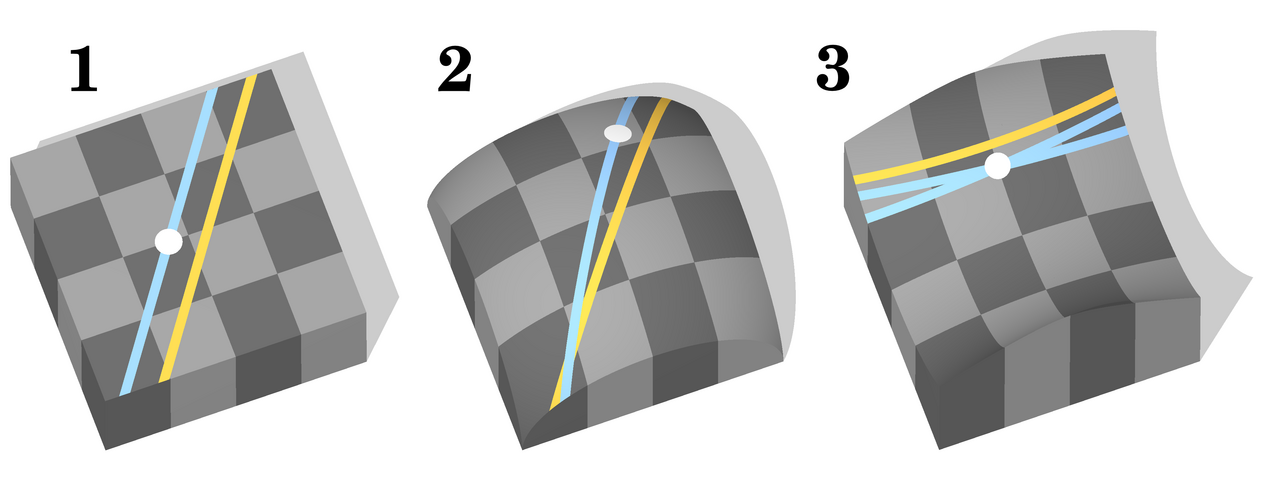
Geometría no euclidiana
De izquierda a derecha: geometría euclidiana, geometría esférica y geometría hiperbólica
En geometría hiperbólica , dada cualquier recta y cualquier punto, hay infinitas rectas que pasan por ese punto y que no intersecan a la recta dada. [5]
^ Antonio, Franklin (1992). "Capítulo IV.6: Intersección de segmentos de línea más rápida". En Kirk, David (ed.). Gemas gráficas III . Academic Press, Inc. págs. 199-202. ISBN0-12-059756-X.
^ Birchfield, Stanley (23 de abril de 1998). "Coordenadas homogéneas". robótica.stanford.edu . Archivado desde el original el 29 de septiembre de 2000 . Consultado el 18 de agosto de 2015 .
^ Traa, Johannes (2013). "Intersección de líneas de mínimos cuadrados" (PDF) . cal.cs.illinois.edu . Archivado desde el original (PDF) el 12 de septiembre de 2017 . Consultado el 30 de agosto de 2018 .
^ ab "Explorando el espacio hiperbólico" (PDF) . math.berkeley.edu . Consultado el 3 de junio de 2022 .
enlaces externos
Distancia entre Líneas y Segmentos con su Punto de Aproximación Más Cercano, aplicable a dos, tres o más dimensiones.



![{\displaystyle {\begin{aligned}P_{x}&={\frac {(x_{1}y_{2}-y_{1}x_{2})(x_{3}-x_{4})- (x_{1}-x_{2})(x_{3}y_{4}-y_{3}x_{4})}{(x_{1}-x_{2})(y_{3}-y_ {4})-(y_{1}-y_{2})(x_{3}-x_{4})}}\\[4px]P_{y}&={\frac {(x_{1}y_ {2}-y_{1}x_{2})(y_{3}-y_{4})-(y_{1}-y_{2})(x_{3}y_{4}-y_{3} x_{4})}{(x_{1}-x_{2})(y_{3}-y_{4})-(y_{1}-y_{2})(x_{3}-x_{4 })}}\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/013a4193eae935296d58199bf902574a99c34a5f)































