

Lunokhod (en ruso: Луноход , AFI: [lʊnɐˈxot] , "Caminante lunar") fue una serie de vehículos lunares robóticos soviéticos diseñados para aterrizar en la Luna entre 1969 y 1977. Lunokhod 1 fue el primer robot itinerante controlado a distancia en aterrizar en un cuerpo extraterrestre.
El Lunokhod 1A de 1969 (Lunokhod 0, Lunokhod No. 201) fue destruido durante el lanzamiento, el Lunokhod 1 de 1970 y el Lunokhod 2 de 1973 aterrizaron en la Luna, y el Lunokhod 3 (Lunokhod No. 205, planeado para 1977) nunca fue lanzado. Las misiones exitosas se realizaron simultáneamente con las series Zond y Luna de misiones de sobrevuelo, orbitación y aterrizaje en la Luna.
Los Lunokhods fueron diseñados principalmente para apoyar las misiones tripuladas soviéticas a la Luna durante la carrera lunar . En cambio, se utilizaron como robots controlados a distancia para la exploración de la superficie lunar y el retorno de imágenes, después de los alunizajes tripulados de Apolo y la cancelación del programa tripulado soviético a la Luna.
Los Lunokhods fueron transportados a la superficie lunar por la nave espacial Luna , que fue lanzada por cohetes Proton-K .

La misión principal original de Lunokhod era ser el respaldo para las expediciones tripuladas a la Luna L3 y para la posterior base lunar Zvezda . [ cita requerida ] Para la seguridad de la misión, semanas antes de la misión humana en un módulo de aterrizaje LK , se enviarían un módulo de aterrizaje no tripulado LK-R del complejo de expedición lunar L3 y dos vehículos exploradores automatizados Lunokhod a la Luna para un estudio preliminar de la superficie alrededor de los sitios LK-R y LK, para actuar como radiobalizas para aterrizajes de precisión de LK-R y LK, y para una evaluación visual del estado del sitio. [1]
A mediados de 1968, en la instalación KIP-10 o NIP-10 (КИП-10 o НИП-10, ubicada en 45°03′10″N 33°53′25″E / 45.052703, -33.890256 ) [2] en la ciudad cerrada Shkolnoye (Simferopol-28) , cerca de Simferopol , Crimea , se construyó un lunodromo (лунодром - Moondrome, ubicado en 45°03′15″N 33°53′37″E / 45.054212, -33.893627 , fue construido. Cubría un área de una hectárea (120 metros por 70 metros) y era muy similar a algunas partes de la superficie lunar. Fue construido utilizando más de 3.000 metros cúbicos de tierra, e incluía 54 cráteres de hasta 16 m de diámetro y alrededor de 160 rocas de varios tamaños. [3] Toda el área estaba rodeada de ladrillos, pintados de gris y negro. Se utilizó para analizar problemas con el chasis del Lunokhod y la habilidad del cosmonauta para controlarlo. [4] [5]
La ciudad cerrada Simferopol-28 albergaba la instalación de rastreo más importante de la Unión Soviética, con el mayor número de antenas, la mayor superficie y la mayor cantidad de personal de todas las instalaciones de rastreo soviéticas. La instalación formaba parte de una red de diez instalaciones que contienen equipos de rastreo de vehículos terrestres por satélite y proporcionan comando y control para eventos civiles y militares soviéticos en el espacio cercano. Además, esta instalación apoyaba todos los programas lunares de la Unión Soviética, en asociación con la Instalación de Rastreo del Espacio Profundo de Evpatoria . [6] [7]
Se construyeron al menos cuatro vehículos completos, con los números de serie 201, 203, 204 y 205. [ cita requerida ]


Los rovers Lunokhod eran vehículos lunares formados por un compartimento en forma de cubo con una gran tapa convexa sobre ocho ruedas con propulsión independiente. Estaban equipados con una antena en forma de cono, una antena helicoidal altamente direccional , cámaras de televisión y dispositivos especiales extensibles para impactar el suelo lunar y realizar mediciones de densidad y pruebas de propiedades mecánicas, además de una carga útil científica que variaba según la misión.
Los Lunokhods fueron diseñados bajo la dirección de Georgy Babakin [8] en la oficina de diseño Lavochkin . El chasis de metal fue diseñado por Alexander Kemurdzhian .
Los vehículos funcionaban con baterías . El rover funcionaba durante el día lunar, deteniéndose ocasionalmente para recargar sus baterías utilizando sus paneles solares. La energía era suministrada durante el día lunar por un panel solar de GaAs en el interior de una tapa redonda con bisagras que cubría el compartimento de instrumentos, que cargaba las baterías cuando se abría. Durante las noches lunares, la tapa estaba cerrada y una unidad de calentamiento de radioisótopos de polonio-210 mantenía los componentes internos a temperatura de funcionamiento . [9]
Para poder trabajar en vacío se utilizó un lubricante especial a base de flúor para las partes mecánicas del rover, y los motores eléctricos, uno en cada cubo de rueda, estaban encerrados en contenedores presurizados. [10] [11]
Los rovers medían 135 centímetros de alto y pesaban 840 kg. Tenían unos 170 centímetros de largo y 160 centímetros de ancho y ocho ruedas, cada una con suspensión independiente, motor y freno. El rover tenía dos velocidades, aproximadamente 1 y 2 km/h.
Los Lunokhods fueron transportados a la superficie lunar por la nave espacial Luna , que fue lanzada por cohetes Proton-K . La parte del módulo de aterrizaje de la nave espacial Luna para los Lunokhods era similar a la utilizada para las misiones de retorno de muestras .
Tras años de desarrollo y entrenamiento de ingeniería secretos, el primer Lunokhod (vehículo 8ЕЛ№201) fue lanzado el 19 de febrero de 1969. En pocos segundos, el cohete se desintegró y el primer Lunokhod se perdió. El resto del mundo no se enteró de la valiosa carga útil del cohete hasta años después. [12] El fallo provocó que la fuente de calor radiactiva, polonio 210 , se extendiera por una gran región de Rusia. [13]
.jpg/1280px-FP2A3576_(23497689198).jpg)
_(6).jpg/1280px-USSR_Lunokhod_1_(6586684979)_(6).jpg)
Tras la destrucción del Lunokhod original, los ingenieros soviéticos comenzaron a trabajar inmediatamente en otro vehículo lunar. El Lunokhod 1 (vehículo 8ЕЛ№203) fue el primero de los dos vehículos lunares no tripulados que la Unión Soviética aterrizó con éxito en la Luna como parte de su programa Lunokhod. La nave espacial que transportaba al Lunokhod 1 se denominó Luna 17. El Lunokhod 1 fue el primer robot remoto itinerante que aterrizó en otro mundo.
El lanzamiento de la Luna 17 se produjo el 10 de noviembre de 1970 a las 14:44:01 UTC. Tras alcanzar la órbita de estacionamiento de la Tierra , se encendió la última etapa del cohete de lanzamiento de la Luna 17 para colocarla en trayectoria hacia la Luna (10 de noviembre de 1970 a las 14:54 UTC). Tras dos maniobras de corrección de rumbo (el 12 y el 14 de noviembre), entró en órbita lunar el 15 de noviembre de 1970 a las 22:00 UTC.
El 17 de noviembre de 1970 a las 03:47 UTC, la nave espacial aterrizó suavemente en la Luna, en el Mar de las Lluvias . El módulo de aterrizaje tenía dos rampas desde las que la carga útil, Lunokhod 1 , podía descender a la superficie. A las 06:28 UTC, el explorador descendió por las rampas y se dirigió a la Luna.
La carga útil del rover incluía cámaras (dos de televisión y cuatro telefotómetros panorámicos), un espectrómetro de fluorescencia de rayos X RIFMA, un telescopio de rayos X RT-1 , un odómetro/penetrómetro PrOP, un detector de radiación RV-2N y un retrorreflector láser TL. [14]
Se difundió una leyenda urbana en la Unión Soviética de que el rover Lunokhod era conducido por un “ enano de la KGB ”, [15] sin embargo, nunca se explicó cómo se almacenaban los suministros para mantenerlos con vida durante una misión de 11 meses.

El Lunokhod 2 (vehículo 8ЕЛ№204) fue el segundo y más avanzado de los dos exploradores Lunokhod. El lanzador puso la nave espacial en órbita terrestre de estacionamiento el 8 de enero de 1973, seguida de una inyección translunar . El 12 de enero de 1973, el Luna 21 fue frenado hasta una órbita lunar de 90 por 100 km (56 por 62 millas).
La sonda espacial Luna 21 aterrizó en la Luna para desplegar el segundo explorador lunar soviético, Lunokhod 2. Los objetivos principales de la misión eran recopilar imágenes de la superficie lunar, examinar los niveles de luz ambiental para determinar la viabilidad de las observaciones astronómicas desde la Luna, realizar experimentos de medición de distancia por láser desde la Tierra, observar los rayos X solares, medir los campos magnéticos locales y estudiar las propiedades mecánicas del material de la superficie lunar.
El aterrizaje se produjo el 15 de enero de 1973 a las 23:35 UT en el cráter Le Monnier (25,85 grados N, 30,45 grados E).
Después de aterrizar, el Lunokhod 2 tomó imágenes de televisión de los alrededores y luego descendió por una rampa hasta la superficie a la 01:14 UT del 16 de enero de 1973. Luego tomó fotografías del módulo de aterrizaje Luna 21 y del lugar de aterrizaje.
El rover estaba equipado con tres cámaras de televisión de barrido lento , una de ellas montada en lo alto del rover para la navegación, que podía devolver imágenes de alta resolución a diferentes velocidades: 3,2, 5,7, 10,9 o 21,1 segundos por fotograma (no fotogramas por segundo). Estas imágenes fueron utilizadas por el equipo de cinco personas de controladores en la Tierra que enviaron comandos de conducción al rover en tiempo real. [16] Había cuatro cámaras panorámicas montadas en el rover.
Los instrumentos científicos incluían un comprobador de mecánica de suelos , un experimento de rayos X solares, un astrofotómetro para medir los niveles de luz visible y ultravioleta , un magnetómetro desplegado delante del rover en el extremo de un brazo de 2,5 m (8 pies 2 pulgadas), un radiómetro , un fotodetector (Rubin-1) para experimentos de detección láser y un reflector de esquina láser suministrado por Francia .

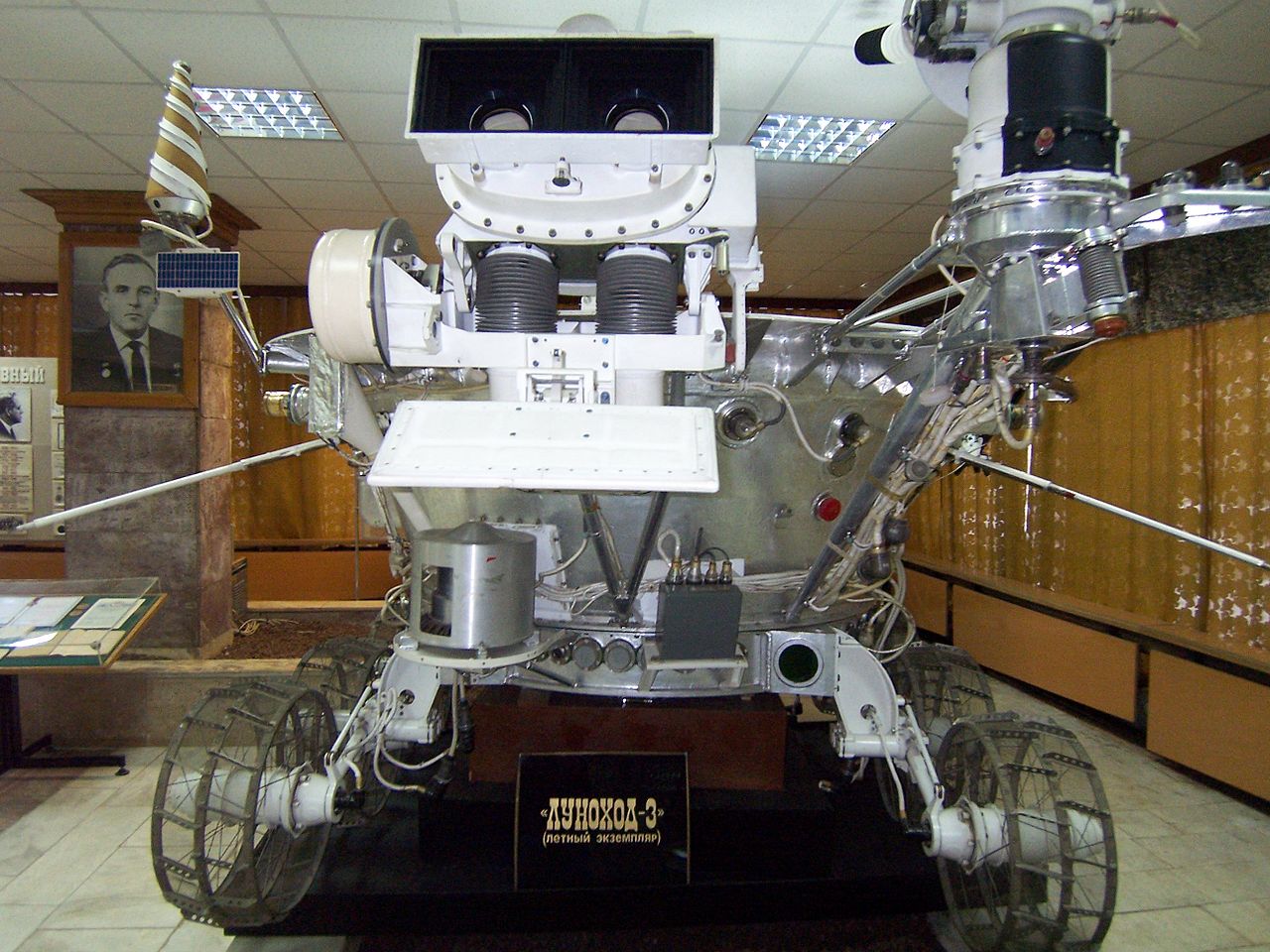
El Lunokhod 3 (vehículo 8ЕЛ№205) fue construido para un alunizaje en 1977 como Luna 25 , [17] pero nunca voló a la Luna debido a la falta de lanzadores y financiación. Permanece en el museo NPO Lavochkin. [18]
Durante sus 322 días terrestres de operaciones, el Lunokhod 1 recorrió 10,5 km (6,5 millas) y envió más de 20.000 imágenes de televisión y 206 panorámicas de alta resolución. [19] Además, realizó veinticinco análisis de suelo con su espectrómetro de fluorescencia de rayos X RIFMA y utilizó su penetrómetro en 500 lugares diferentes.
El Lunokhod 2 estuvo en funcionamiento durante unos cuatro meses, recorrió 42 km (26 millas) de terreno, [20] incluyendo zonas montañosas y grietas . El Lunokhod 2 mantuvo el récord de la distancia más larga recorrida en la superficie de cualquier vehículo extraterrestre hasta 2014. [12] Envió 86 imágenes panorámicas y más de 80.000 imágenes de televisión. Durante este tiempo se completaron muchas pruebas mecánicas de la superficie de la Luna, mediciones de alcance láser y otros experimentos.
En 2010, casi cuarenta años después de la pérdida de señal del Lunokhod 1 en 1971 , el Orbitador de Reconocimiento Lunar de la NASA fotografió sus huellas y ubicación final, y los investigadores, utilizando un telémetro láser pulsado telescópico, detectaron el retrorreflector del robot . [21]
No fue hasta 1997, cuando el explorador Mars Pathfinder envió el rover Sojourner , que se instaló otro vehículo teledirigido en un cuerpo extraterrestre. A modo de comparación, los rovers de exploración de Marte de la NASA , Spirit y Opportunity , de tamaño similar , habían recorrido un total de 21 km (13 millas) en enero de 2009, cuando cumplieron cinco años, y habían transmitido más de 125.000 imágenes. [22]
Según el documental francés de televisión Tank on the Moon , de Jean Afanassieff, el diseño del Lunokhod volvió a cobrar protagonismo 15 años después, debido al desastre de la central nuclear de Chernóbil el 26 de abril de 1986. [23] Las excavadoras teledirigidas, construidas en Alemania del Este y disponibles para las tropas de defensa civil soviéticas, pesaban decenas de toneladas, demasiado pesadas para operar sobre las partes restantes del techo del reactor parcialmente derrumbado. No se podía emplear mano de obra humana para palear los escombros, ya que los turnos de trabajo estaban limitados a intervalos de 90 segundos debido a la intensa radiación ionizante . [24]
Los diseñadores del Lunokhod fueron llamados de regreso de su retiro, y en dos semanas se fabricaron vehículos exploradores que usaban fuentes de calor de desintegración nuclear para el control del clima interno de los bastidores; sus sistemas electrónicos ya estaban reforzados para resistir parcialmente la radiación. [23] Este beneficio permitió a los diseñadores de 1986 idear rápidamente un tipo de vehículo derivado para el trabajo de recuperación de desastres nucleares. El 15 de julio, dos vehículos exploradores, llamados STR-1, [12] fueron entregados a la zona del accidente de Chernóbil y demostraron ser útiles para limpiar los escombros, lo que les valió premios a los diseñadores. Debido a los niveles de radiación extremadamente altos, ambos vehículos exploradores STR-1 finalmente fallaron, y se convocó nuevamente a trabajadores humanos (más tarde llamados liquidadores ). [23] [25]

Hasta 2010, la ubicación final del Lunokhod 1 era incierta por unos pocos kilómetros. [26] Los experimentos de medición de distancia por láser lunar no habían podido detectar una señal de retorno de su retrorreflector desde la década de 1970. [27] El 17 de marzo de 2010, Albert Abdrakhimov encontró tanto el módulo de aterrizaje como el explorador [28] en la imagen M114185541RC del Lunar Reconnaissance Orbiter . [29] El 22 de abril, Tom Murphy ( UCSD ) y Russet McMillan en el Observatorio Apache Point detectaron el retrorreflector del robot utilizando el telémetro láser pulsado telescópico Apache Point. [21]
El Lunokhod 2 sigue siendo detectado por experimentos de medición láser lunar y su posición se conoce con una precisión de menos de un metro. La propiedad del Lunokhod 2 y del módulo de aterrizaje Luna 21 fue vendida por la Asociación Lavochkin por 68.500 dólares estadounidenses en diciembre de 1993 en una subasta de Sotheby's en Nueva York [30] (aunque el catálogo enumera incorrectamente el lote 68A como Luna 17/Lunokhod 1 ). [31] El comprador fue el empresario de juegos de computadora e hijo de un astronauta , Richard Garriott , quien también es conocido por el nombre de su personaje de juego Lord British . Garriott declaró en una entrevista de 2001: "Compré Lunakod 21 [ sic ] a los rusos. Ahora soy el único propietario privado del mundo de un objeto en un cuerpo celeste extranjero. Aunque hay tratados internacionales que dicen que ningún gobierno puede reclamar la geografía fuera del planeta Tierra, yo no soy un gobierno. En resumen, ¡reclamo la Luna en nombre de Lord British !" [32] En 2007, Garriott dijo que todavía es el propietario de Lunokhod 2. [ 33] [34]