Un gráfico de flujo de señales o gráfico de flujo de señales ( SFG ), inventado por Claude Shannon , [1] pero a menudo llamado gráfico de Mason en honor a Samuel Jefferson Mason , quien acuñó el término, [2] es un gráfico de flujo especializado , un gráfico dirigido en el que los nodos representan variables del sistema y las ramas (bordes, arcos o flechas) representan conexiones funcionales entre pares de nodos. Así, la teoría de los grafos de flujo de señales se basa en la de los grafos dirigidos (también llamados dígrafos ), que incluye también la de los grafos orientados . Esta teoría matemática de los dígrafos existe, por supuesto, bastante aparte de sus aplicaciones. [3] [4]
Los SFG se utilizan más comúnmente para representar el flujo de señales en un sistema físico y sus controladores, formando un sistema ciberfísico . Entre sus otros usos se encuentran la representación del flujo de señal en diversas redes electrónicas y amplificadores, filtros digitales , filtros de estado variable y algunos otros tipos de filtros analógicos. En casi toda la literatura, un gráfico de flujo de señales está asociado con un conjunto de ecuaciones lineales .
Historia
Wai-Kai Chen escribió: "El concepto de gráfico de flujo de señales fue desarrollado originalmente por Shannon [1942] [1]
al tratar con computadoras analógicas. El mayor crédito por la formulación de gráficos de flujo de señales normalmente se otorga a Mason [ 1953], [2] [1956]. [5] Mostró cómo utilizar la técnica del gráfico de flujo de señales para resolver algunos problemas electrónicos difíciles de una manera relativamente sencilla. El término gráfico de flujo de señales se utilizó debido a su aplicación original a la electrónica. problemas y la asociación con señales electrónicas y diagramas de flujo de los sistemas en estudio." [6]
Lorens escribió: "Antes del trabajo de Mason , CE Shannon [1] resolvió varias de las propiedades de lo que ahora se conoce como diagramas de flujo. Desafortunadamente, el artículo originalmente tenía una clasificación restringida y muy pocas personas tenían acceso al material. ". [7]
"Las reglas para la evaluación del determinante gráfico de un gráfico de Mason fueron dadas y probadas por primera vez por Shannon [1942] mediante inducción matemática. Su trabajo permaneció esencialmente desconocido incluso después de que Mason publicara su obra clásica en 1953. Tres años más tarde, Mason [1956 ] redescubrió las reglas y las demostró considerando el valor de un determinante y cómo cambia a medida que se agregan variables al gráfico. [...]" [8]
Dominio de aplicación
Robichaud et al. identificar el ámbito de aplicación de los GFS de la siguiente manera: [9]
"Todos los sistemas físicos análogos a estas redes [construidas con transformadores ideales, elementos activos y giratorios] constituyen el dominio de aplicación de las técnicas desarrolladas [aquí]. Trent [10] ha demostrado que todos los sistemas físicos que satisfacen las siguientes condiciones caen en esta categoría.
El sistema concentrado finito se compone de varias partes simples, cada una de las cuales tiene propiedades dinámicas conocidas que pueden definirse mediante ecuaciones que utilizan dos tipos de variables escalares y parámetros del sistema. Las variables del primer tipo representan cantidades que pueden medirse, al menos conceptualmente, conectando un instrumento indicador a dos puntos de conexión del elemento. Las variables del segundo tipo caracterizan cantidades que se pueden medir conectando un medidor en serie con el elemento. Las velocidades y posiciones relativas, las diferencias de presión y los voltajes son cantidades típicas de la primera clase, mientras que las corrientes eléctricas, las fuerzas y las tasas de flujo de calor son variables del segundo tipo. Firestone ha sido el primero en distinguir estos dos tipos de variables con los nombres cross variables y Through variables .
Las variables del primer tipo deben obedecer una ley de malla, análoga a la ley de voltaje de Kirchhoff, mientras que las variables del segundo tipo deben satisfacer una ley de incidencia análoga a la ley de corriente de Kirchhoff.
Las dimensiones físicas de los productos apropiados de las variables de los dos tipos deben ser consistentes. Para los sistemas en los que se cumplen estas condiciones, es posible dibujar un gráfico lineal isomorfo con las propiedades dinámicas del sistema descritas por las variables elegidas. Las técnicas [...] se pueden aplicar directamente a estos gráficos lineales así como a redes eléctricas, para obtener un gráfico de flujo de señales del sistema."
Conceptos básicos de diagramas de flujo
Mason introdujo la siguiente ilustración y su significado para ilustrar conceptos básicos: [2]
(a) Gráfico de flujo simple, (b) Las flechas de (a) incidente en el nodo 2 (c) Las flechas de (a) incidente en el nodo 3
En los gráficos de flujo simples de la figura, una dependencia funcional de un nodo se indica mediante una flecha entrante, el nodo que origina esta influencia es el comienzo de esta flecha, y en su forma más general el gráfico de flujo de señales indica mediante flechas entrantes sólo aquellos nodos que influyen en el procesamiento en el nodo receptor, y en cada nodo, i , las variables entrantes se procesan de acuerdo con una función asociada con ese nodo, digamos Fi . El diagrama de flujo en (a) representa un conjunto de relaciones explícitas:
El nodo x 1 es un nodo aislado porque no entra ninguna flecha; las ecuaciones para x 2 y x 3 tienen las gráficas que se muestran en las partes (b) y (c) de la figura.
Estas relaciones definen para cada nodo una función que procesa las señales de entrada que recibe. Cada nodo no fuente combina las señales de entrada de alguna manera y transmite una señal resultante a lo largo de cada rama saliente. "Un diagrama de flujo, tal como lo definió originalmente Mason, implica un conjunto de relaciones funcionales, lineales o no". [9]
Sin embargo, el gráfico de Mason comúnmente utilizado es más restringido, asumiendo que cada nodo simplemente suma sus flechas entrantes y que cada rama involucra solo al nodo iniciador involucrado. Por tanto, en este enfoque más restrictivo, el nodo x 1 no se ve afectado mientras:
y ahora las funciones fij pueden asociarse con las ramas de flujo de señal ij que unen el par de nodos xi , xj , en lugar de tener relaciones generales asociadas con cada nodo. Una contribución de un nodo a sí mismo como f 33 para x 3 se llama autobucle . Con frecuencia, estas funciones son simplemente factores multiplicativos (a menudo llamados transmitancias o ganancias ), por ejemplo, f ij (x j )=c ij x j , donde c es un escalar, pero posiblemente una función de algún parámetro como la variable de transformada de Laplace s . Los gráficos de flujo de señales se utilizan muy a menudo con señales transformadas de Laplace, porque entonces representan sistemas de ecuaciones diferenciales lineales . En este caso, la transmitancia, c(s) , a menudo se denomina función de transferencia .
Eligiendo las variables
En general, existen varias formas de elegir las variables en un sistema complejo. Correspondiente a cada elección, se puede escribir un sistema de ecuaciones y cada sistema de ecuaciones se puede representar en una gráfica. Esta formulación de las ecuaciones se vuelve directa y automática si se dispone de técnicas que permitan trazar un gráfico directamente a partir del diagrama esquemático del sistema en estudio. La estructura de los gráficos así obtenidos se relaciona de manera sencilla con la topología del diagrama esquemático , y se hace innecesario considerar las ecuaciones , incluso implícitamente, para obtener el gráfico. En algunos casos, basta con imaginar el diagrama de flujo en el diagrama esquemático y se pueden obtener las respuestas deseadas sin siquiera dibujar el diagrama de flujo.
—Robichaud [11 ]
No unicidad
Robichaud et al. escribió: "El gráfico de flujo de señal contiene la misma información que las ecuaciones de las que se deriva; pero no existe una correspondencia uno a uno entre el gráfico y el sistema de ecuaciones. Un sistema dará gráficos diferentes según la Orden en el que se utilizan las ecuaciones para definir la variable escrita en el lado izquierdo." [9] Si todas las ecuaciones relacionan todas las variables dependientes, entonces hay n! posibles SFG para elegir. [12]
Gráficos de flujo de señal lineal
Los métodos del gráfico de flujo de señales lineales (SFG) solo se aplican a sistemas lineales invariantes en el tiempo , como lo estudia su teoría asociada . Al modelar un sistema de interés, el primer paso suele ser determinar las ecuaciones que representan el funcionamiento del sistema sin asignar causas y efectos (esto se denomina modelado acausal). [13] A partir de este sistema de ecuaciones se deriva entonces un SFG.
Un SFG lineal consta de nodos indicados por puntos y ramas direccionales ponderadas indicadas por flechas. Los nodos son las variables de las ecuaciones y los pesos de las ramas son los coeficientes. Las señales sólo pueden atravesar un ramal en la dirección indicada por su flecha. Los elementos de un SFG sólo pueden representar las operaciones de multiplicación por un coeficiente y suma, que son suficientes para representar las ecuaciones restringidas. Cuando una señal atraviesa una rama en la dirección indicada, la señal se multiplica por el peso de la rama. Cuando dos o más ramas se dirigen al mismo nodo, se suman sus salidas.
Para sistemas descritos mediante ecuaciones diferenciales o algebraicas lineales, el gráfico de flujo de señales es matemáticamente equivalente al sistema de ecuaciones que describe el sistema, y las ecuaciones que gobiernan los nodos se descubren para cada nodo sumando las ramas entrantes a ese nodo. Estas ramas entrantes transmiten las contribuciones de los otros nodos, expresadas como el valor del nodo conectado multiplicado por el peso de la rama de conexión, generalmente un número real o función de algún parámetro (por ejemplo, una variable de transformada de Laplace s ).
Para redes activas lineales, Choma escribe: [14] "Por 'representación de flujo de señal' [o 'gráfico', como se le conoce comúnmente] nos referimos a un diagrama que, al mostrar las relaciones algebraicas entre las variables de rama relevantes de la red, pinta una imagen inequívoca de la forma en que una señal de entrada aplicada 'fluye' desde los puertos de entrada a salida... "
Chen describe una motivación para un análisis SFG: [15]
"El análisis de un sistema lineal se reduce en última instancia a la solución de un sistema de ecuaciones algebraicas lineales. Como alternativa a los métodos algebraicos convencionales para resolver un sistema, es posible obtener una solución considerando las propiedades de ciertas gráficas dirigidas asociadas con la sistema." [Ver subsección: Resolución de ecuaciones lineales.] "Las incógnitas de las ecuaciones corresponden a los nodos del gráfico, mientras que las relaciones lineales entre ellas aparecen en forma de aristas dirigidas que conectan los nodos... Los gráficos dirigidos asociados en muchos casos se puede configurar directamente mediante la inspección del sistema físico sin la necesidad de formular primero las →ecuaciones asociadas..."
Componentes básicos
Elementos y construcciones de un gráfico de flujo de señales.
Un gráfico de flujo de señal lineal está relacionado con un sistema de ecuaciones lineales [16] de la siguiente forma:
donde = transmitancia (o ganancia) de a .
La figura de la derecha muestra varios elementos y construcciones de un gráfico de flujo de señales (SFG). [17]
El cuadro (a) es un nodo. En este caso, el nodo está etiquetado . Un nodo es un vértice que representa una variable o señal.
Un nodo de origen solo tiene ramas salientes (representa una variable independiente). Como caso especial, un nodo de entrada se caracteriza por tener una o más flechas adjuntas que apuntan en dirección opuesta al nodo y ninguna flecha que apunte hacia el nodo. Cualquier SFG abierto y completo tendrá al menos un nodo de entrada.
Un nodo de salida o receptor solo tiene ramas entrantes (representa una variable dependiente). Aunque cualquier nodo puede ser una salida, a menudo se utilizan nodos de salida explícitos para proporcionar claridad. Los nodos de salida explícitos se caracterizan por tener una o más flechas adjuntas que apuntan hacia el nodo y ninguna flecha que apunte en sentido contrario al nodo. No se requieren nodos de salida explícitos.
Un nodo mixto tiene ramas entrantes y salientes.
La figura (b) es una rama con una ganancia multiplicativa de . El significado es que la salida, en la punta de la flecha, es multiplicada por la entrada en la cola de la flecha. La ganancia puede ser una constante simple o una función (por ejemplo: una función de alguna variable de transformación como , o , para relaciones de transformada de Laplace, Fourier o Z).
El cuadro (c) es una rama con una ganancia multiplicativa de uno. Cuando se omite la ganancia, se supone que es la unidad.
El cuadro (d) es un nodo de entrada. En este caso, se multiplica por la ganancia .
El cuadro (e) es un nodo de salida explícito; el borde entrante tiene una ganancia de .
El cuadro (f) muestra la suma. Cuando dos o más flechas apuntan a un nodo, se suman las señales transmitidas por los bordes.
El cuadro (g) muestra un bucle simple. La ganancia del bucle es .
El cuadro (h) muestra la expresión .
Los términos utilizados en la teoría lineal SFG también incluyen: [17]
Camino. Un camino es un conjunto continuo de ramas atravesadas en la dirección indicada por las flechas de las ramas.
Camino abierto. Si no se vuelve a visitar ningún nodo, el camino está abierto.
Camino hacia adelante. Una ruta desde un nodo de entrada (fuente) a un nodo de salida (sumidero) que no vuelve a visitar ningún nodo.
Ganancia de camino : el producto de las ganancias de todas las ramas del camino.
Bucle. Un camino cerrado. (se origina y termina en el mismo nodo, y ningún nodo se toca más de una vez).
Ganancia del bucle : producto de las ganancias de todas las ramas del bucle.
Bucles que no se tocan. Los bucles que no se tocan no tienen nodos comunes.
Reducción de gráficos. Eliminación de uno o más nodos de un gráfico mediante transformaciones de gráficos.
Nodo residual. En cualquier proceso contemplado de reducción de gráficos, los nodos que se conservarán en el nuevo gráfico se denominan nodos residuales. [2]
Dividir un nodo. Dividir un nodo corresponde a dividir un nodo en dos medios nodos, uno de los cuales es un sumidero y el otro una fuente. [18]
Índice : el índice de un gráfico es el número mínimo de nodos que deben dividirse para eliminar todos los bucles de un gráfico.
Nodo índice. Los nodos que se dividen para determinar el índice de un gráfico se denominan nodos de índice y, en general, no son únicos.
Reducción sistemática de fuentes y sumideros
Un gráfico de flujo de señales se puede simplificar mediante reglas de transformación de gráficos. [19] [20] [21] Estas reglas de simplificación también se conocen como álgebra de gráficos de flujo de señales . [22]
El propósito de esta reducción es relacionar las variables dependientes de interés (nodos residuales, sumideros) con sus variables independientes (fuentes).
La reducción sistemática de un gráfico de flujo de señal lineal es un método gráfico equivalente al método de eliminación de Gauss-Jordan para resolver ecuaciones lineales. [23]
Las reglas presentadas a continuación pueden aplicarse una y otra vez hasta que el gráfico de flujo de señal se reduzca a su "forma residual mínima". Una reducción adicional puede requerir la eliminación del bucle o el uso de una "fórmula de reducción" con el objetivo de conectar directamente los nodos receptores que representan las variables dependientes con los nodos fuente que representan las variables independientes. De esta manera, cualquier gráfico de flujo de señales se puede simplificar eliminando sucesivamente los nodos internos hasta que solo queden los nodos de entrada, salida y índice. [24] [25] Robichaud describió este proceso de reducción sistemática del diagrama de flujo:
La reducción de un gráfico procede de la eliminación de ciertos nodos para obtener un gráfico residual que muestra sólo las variables de interés. Esta eliminación de nodos se denomina " absorción de nodos ". Este método se acerca al conocido proceso de eliminaciones sucesivas de variables no deseadas en un sistema de ecuaciones. Se puede eliminar una variable eliminando el nodo correspondiente en el gráfico. Si se reduce la gráfica lo suficiente, es posible obtener la solución para cualquier variable y este es el objetivo que se tendrá presente en esta descripción de los diferentes métodos de reducción de la gráfica. En la práctica, sin embargo, las técnicas de reducción se utilizarán únicamente para transformar el gráfico en un gráfico residual que exprese algunas relaciones fundamentales. Las soluciones completas se obtendrán más fácilmente mediante la aplicación de la regla de Mason . [26]
El propio gráfico programa el proceso de reducción. De hecho, una simple inspección del gráfico sugiere fácilmente los diferentes pasos de la reducción que se llevan a cabo mediante transformaciones elementales, mediante eliminación de bucles o mediante el uso de una fórmula de reducción. [26]
— Robichaud, Aplicaciones y gráficos de flujo de señales, 1962
Para reducir digitalmente un gráfico de flujo mediante un algoritmo, Robichaud extiende la noción de un gráfico de flujo simple a un gráfico de flujo generalizado :
Antes de describir el proceso de reducción... la correspondencia entre la gráfica y un sistema de ecuaciones lineales... debe generalizarse... Las gráficas generalizadas representarán algunas relaciones operativas entre grupos de variables ... A cada rama de la gráfica generalizada gráfico está asociada una matriz que da las relaciones entre las variables representadas por los nodos en los extremos de esa rama... [27]
Las transformaciones elementales [definidas por Robichaud en su Figura 7.2, p. 184] y la reducción del bucle permiten la eliminación de cualquier nodo j del gráfico mediante la fórmula de reducción : [descrita en la ecuación 7-1 de Robichaud]. Con la fórmula de reducción, siempre es posible reducir un gráfico de cualquier orden... [Después de la reducción] el gráfico final será un gráfico en cascada en el que las variables de los nodos sumideros se expresan explícitamente como funciones de las fuentes. Este es el único método para reducir el gráfico generalizado ya que la regla de Mason es obviamente inaplicable. [28]
— Robichaud, Aplicaciones y gráficos de flujo de señales, 1962
La definición de transformación elemental varía de un autor a otro:
Algunos autores sólo consideran transformaciones elementales la suma de ganancias de aristas paralelas y la multiplicación de ganancias de aristas en serie, pero no la eliminación de autobucles [23] [29]
Otros autores consideran la eliminación de un self-loop como una transformación elemental [30]
Bordes paralelos. Reemplace los bordes paralelos con un solo borde que tenga una ganancia igual a la suma de las ganancias originales.
El gráfico de la izquierda tiene bordes paralelos entre los nodos. A la derecha, estos bordes paralelos han sido reemplazados por un solo borde que tiene una ganancia igual a la suma de las ganancias de cada borde original.
Las ecuaciones correspondientes a la reducción entre N y el nodo I 1 son:
Bordes salientes. Reemplace los bordes salientes con bordes que fluyen directamente desde las fuentes del nodo.
El gráfico de la izquierda tiene un nodo intermedio N entre los nodos desde los que tiene entradas y los nodos hacia los que sale. El gráfico de la derecha muestra flujos directos entre estos conjuntos de nodos, sin transitar por N.
En aras de la simplicidad, N y sus entradas no están representados. Se eliminan las salidas de N.
Las ecuaciones correspondientes a la reducción que relaciona directamente las señales de entrada de N con sus señales de salida son:
Nodos de señal cero.
Elimine los bordes salientes de un nodo que se determine que tiene un valor de cero.
Si el valor de un nodo es cero, se pueden eliminar sus bordes salientes.
Nodos sin salidas.
Eliminar un nodo sin salidas.
En este caso, N no es una variable de interés y no tiene aristas de salida; por lo tanto, N y sus bordes de entrada pueden eliminarse.
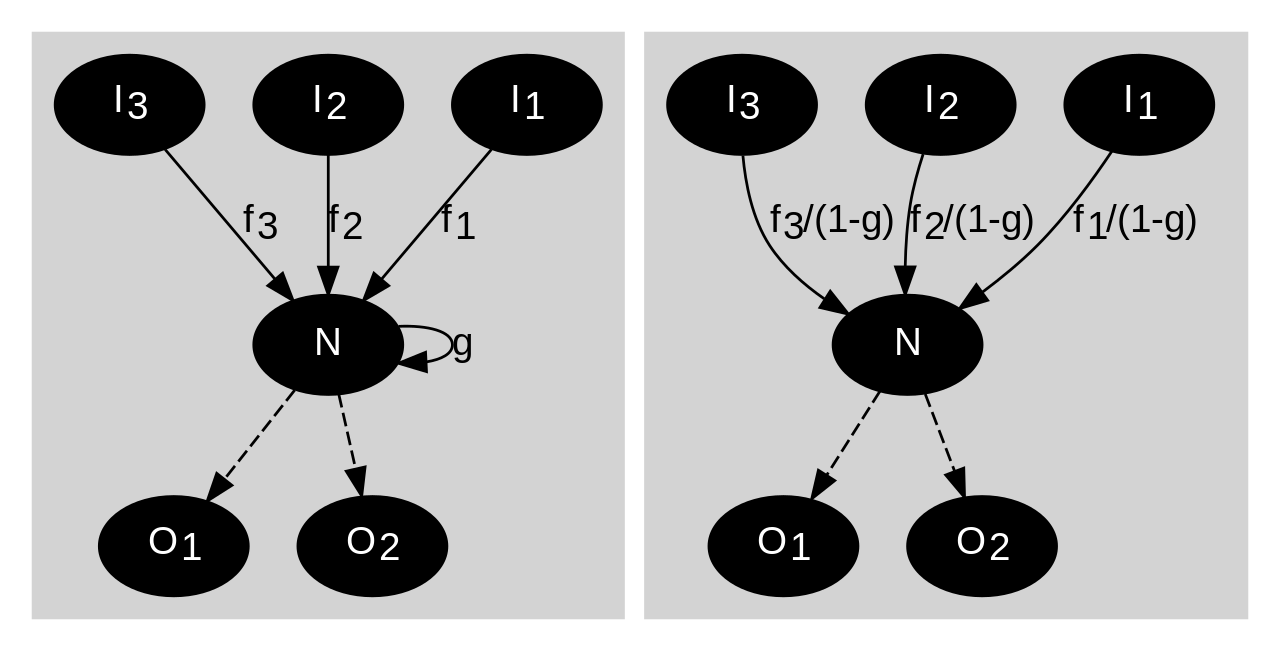
Borde con bucle automático. Reemplace los bordes en bucle ajustando las ganancias en los bordes entrantes.
El gráfico de la izquierda tiene un borde circular en el nodo N , con una ganancia de g . A la derecha, se ha eliminado el borde del bucle y todos los bordes entrantes tienen su ganancia dividida por (1-g) .
Las ecuaciones correspondientes a la reducción entre N y todas sus señales de entrada son:
Los gráficos de flujo de señales se pueden utilizar para resolver conjuntos de ecuaciones lineales simultáneas. [33] El conjunto de ecuaciones debe ser consistente y todas las ecuaciones deben ser linealmente independientes.
Poner las ecuaciones en "forma estándar"
Gráfico de flujo para tres ecuaciones simultáneas. Los bordes que inciden en cada nodo tienen colores diferentes solo para dar énfasis. Girar la figura 120° simplemente permuta los índices.
Para M ecuaciones con N incógnitas donde cada y j es un valor conocido y cada x j es un valor desconocido, existe una ecuación para cada conocida de la siguiente forma.
; la forma habitual para ecuaciones lineales simultáneas con 1 ≤ j ≤ M
Aunque es factible, particularmente para casos simples, establecer un gráfico de flujo de señal usando las ecuaciones de esta forma, cierta reordenación permite un procedimiento general que funciona fácilmente para cualquier conjunto de ecuaciones, como se presenta a continuación. Para continuar, primero se reescriben las ecuaciones como
y reescrito además como
y finalmente reescrito como
; forma adecuada para expresarse como un gráfico de flujo de señal.
El gráfico de flujo de señales ahora se organiza seleccionando una de estas ecuaciones y dirigiéndose al nodo del lado derecho. Este es el nodo para el cual el nodo se conecta a sí mismo con la rama de peso que incluye un '+1', formando un bucle automático en el gráfico de flujo. Los otros términos de esa ecuación conectan este nodo primero con la fuente en esta ecuación y luego con todas las demás ramas que inciden en este nodo. Cada ecuación se trata de esta manera, y luego cada rama incidente se une a su respectivo nodo emanante. Por ejemplo, en la figura se muestra el caso de tres variables y la primera ecuación es:
donde el lado derecho de esta ecuación es la suma de las flechas ponderadas que inciden en el nodo x 1 .
Como existe una simetría básica en el tratamiento de cada nodo, un punto de partida simple es una disposición de los nodos con cada nodo en un vértice de un polígono regular. Cuando se expresa utilizando los coeficientes generales { c in }, el entorno de cada nodo es igual que el resto, excepto una permutación de índices. En la figura se ve una implementación de este tipo para un conjunto de tres ecuaciones simultáneas. [34]
A menudo, los valores conocidos, y j, se toman como causas principales y los valores desconocidos, x j , como efectos, pero independientemente de esta interpretación, la última forma del conjunto de ecuaciones se puede representar como un gráfico de flujo de señales. Este punto se analiza con más detalle en la subsección Interpretación de la "causalidad".
Aplicando la fórmula de ganancia de Mason
En el caso más general, los valores de todas las variables x k se pueden calcular calculando la fórmula de ganancia de Mason para el camino desde cada y j hasta cada x k y usando superposición.
donde G kj = la suma de la fórmula de ganancia de Mason calculada para todos los caminos desde la entrada y j hasta la variable x k .
En general, hay N-1 caminos desde y j hasta la variable x k , por lo que el esfuerzo computacional para calcular G kj es proporcional a N-1. Dado que hay M valores de y j , G kj debe calcularse M veces para un solo valor de x k . El esfuerzo computacional para calcular una única variable xk es proporcional a (N-1)(M). El esfuerzo para calcular todas las variables xk es proporcional a (N)(N-1)(M). Si hay N ecuaciones y N incógnitas, entonces el esfuerzo de cálculo es del orden de N 3 .
Relación con los diagramas de bloques
Ejemplo: diagrama de bloques y dos representaciones de gráficos de flujo de señales equivalentes.
Para algunos autores, un gráfico de flujo de señal lineal es más restringido que un diagrama de bloques , [35] en el sentido de que el SFG describe rigurosamente ecuaciones algebraicas lineales representadas por un gráfico dirigido.
Para otros autores, los diagramas de bloques lineales y los gráficos de flujo de señales lineales son formas equivalentes de representar un sistema, y cualquiera de ellos puede usarse para resolver la ganancia. [36]
Bakshi & Bakshi, [37] proporcionan una tabulación de la comparación entre diagramas de bloques y gráficos de flujo de señales y otra tabulación de Kumar. [38] Según Barker et al. : [39]
"El gráfico de flujo de señales es el método más conveniente para representar un sistema dinámico. La topología del gráfico es compacta y las reglas para manipularlo son más fáciles de programar que las reglas correspondientes que se aplican a los diagramas de bloques".
En la figura, se muestra un diagrama de bloques simple para un sistema de retroalimentación con dos posibles interpretaciones como un gráfico de flujo de señal. La entrada R(s) es la señal de entrada transformada de Laplace; se muestra como un nodo fuente en el gráfico de flujo de señal (un nodo fuente no tiene bordes de entrada). La señal de salida C(s) es la variable de salida transformada de Laplace. Se representa como un nodo sumidero en el diagrama de flujo (un sumidero no tiene bordes de salida). G(s) y H(s) son funciones de transferencia, donde H(s) sirve para retroalimentar una versión modificada de la salida a la entrada, B(s) . Las dos representaciones del gráfico de flujo son equivalentes.
Interpretando la 'causalidad'
Mason aplicó el término "causa y efecto" a los SFG: [2]
"El proceso de construir un gráfico consiste en rastrear una sucesión de causas y efectos a través del sistema físico. Una variable se expresa como un efecto explícito debido a ciertas causas; estas, a su vez, se reconocen como efectos debido a otras causas".
— SJ Mason: Sección IV: Aplicaciones ilustrativas de la técnica del diagrama de flujo
y ha sido repetido por muchos autores posteriores: [40]
"El gráfico de flujo de señales es otra herramienta visual para representar relaciones causales entre los componentes del sistema. Es una versión simplificada de un diagrama de bloques presentado por SJ Mason como una representación de causa y efecto de sistemas lineales".
— Arthur GO Mutambara: Diseño y análisis de sistemas de control , p.238
Sin embargo, el artículo de Mason se preocupa por mostrar con gran detalle cómo un conjunto de ecuaciones está conectado a un SFG, un énfasis que no guarda relación con las nociones intuitivas de "causa y efecto". Las intuiciones pueden ser útiles para llegar a un GFS o para obtener información de un GFS, pero no son esenciales para el GFS. La conexión esencial del SFG es con su propio conjunto de ecuaciones, como lo describe, por ejemplo, Ogata: [41]
"Un gráfico de flujo de señales es un diagrama que representa un conjunto de ecuaciones algebraicas simultáneas. Al aplicar el método del gráfico de flujo de señales al análisis de sistemas de control, primero debemos transformar ecuaciones diferenciales lineales en ecuaciones algebraicas en [la variable transformada de Laplace ] s . ".
— Katsuhiko Ogata: Ingeniería de control moderna , p. 104
Aquí no hay ninguna referencia a "causa y efecto", y como dijo Barutsky: [42]
"Al igual que los diagramas de bloques, los gráficos de flujo de señales representan la estructura computacional, no física, de un sistema".
— Wolfgang Borutzky, Metodología del gráfico de bonos , p. 10
El término "causa y efecto" puede malinterpretarse en su aplicación al SFG y tomarse incorrectamente para sugerir una visión sistémica de la causalidad, [43] en lugar de un significado computacional . Para mantener clara la discusión, puede ser aconsejable utilizar el término "causalidad computacional", como se sugiere para los gráficos de bonos : [44]
"La literatura sobre gráficos de Bond utiliza el término causalidad computacional, que indica el orden de cálculo en una simulación, para evitar cualquier interpretación en el sentido de causalidad intuitiva".
El término "causalidad computacional" se explica utilizando el ejemplo de corriente y voltaje en una resistencia: [45]
"Por lo tanto, la causalidad computacional de las leyes físicas no puede estar predeterminada, sino que depende del uso particular de esa ley. No podemos concluir si es la corriente que fluye a través de una resistencia la que causa una caída de voltaje, o si es la diferencia de potenciales en los dos extremos de la resistencia que hacen que la corriente fluya. Físicamente, estos son simplemente dos aspectos concurrentes de un mismo fenómeno físico. Computacionalmente, es posible que tengamos que asumir a veces una posición y otras veces la otra.
— François Cellier y Ernesto Kofman: §1.5 Software de simulación hoy y mañana , p. 15
Se puede organizar un programa o algoritmo de computadora para resolver un conjunto de ecuaciones utilizando varias estrategias. Se diferencian en cómo priorizan la búsqueda de algunas de las variables en términos de otras, y estas decisiones algorítmicas, que se refieren simplemente a la estrategia de solución, luego configuran las variables expresadas como variables dependientes anteriormente en la solución como "efectos", determinados por el resto de variables que ahora son "causas", en el sentido de "causalidad computacional".
Usando esta terminología, es la causalidad computacional , no la causalidad del sistema , lo que es relevante para el SFG. Existe un amplio debate filosófico, que no se ocupa específicamente del SFG, sobre las conexiones entre la causalidad computacional y la causalidad sistémica. [46]
Gráficos de flujo de señales para análisis y diseño.
Los gráficos de flujo de señales se pueden utilizar para análisis, es decir, para comprender un modelo de un sistema existente, o para síntesis, es decir, para determinar las propiedades de una alternativa de diseño.
Gráficos de flujo de señales para análisis de sistemas dinámicos.
Al construir un modelo de un sistema dinámico, Dorf & Bishop proporcionan una lista de pasos: [47]
Definir el sistema y sus componentes.
Formule el modelo matemático y enumere los supuestos necesarios.
Escribe las ecuaciones diferenciales que describen el modelo.
Resuelva las ecuaciones para las variables de salida deseadas.
Examinar las soluciones y los supuestos.
Si es necesario, vuelva a analizar o rediseñar el sistema.
—RC Dorf y RH Bishop, Sistemas de control modernos , Capítulo 2, pág. 2
En este flujo de trabajo, se utilizan ecuaciones del modelo matemático del sistema físico para derivar las ecuaciones del gráfico de flujo de señales.
Gráficos de flujo de señales para síntesis de diseño.
Los gráficos de flujo de señales se han utilizado en Design Space Exploration (DSE) , como una representación intermedia hacia una implementación física. El proceso DSE busca una solución adecuada entre diferentes alternativas. En contraste con el flujo de trabajo de análisis típico, donde primero se modela un sistema de interés con las ecuaciones físicas de sus componentes, la especificación para sintetizar un diseño podría ser una función de transferencia deseada. Por ejemplo, diferentes estrategias crearían diferentes gráficos de flujo de señales, de los cuales se derivan las implementaciones. [48]
Otro ejemplo utiliza un SFG anotado como expresión del comportamiento de tiempo continuo, como entrada a un generador de arquitectura [49]
Fórmulas de Shannon y Shannon-Happ
La fórmula de Shannon es una expresión analítica para calcular la ganancia de un conjunto interconectado de amplificadores en una computadora analógica. Durante la Segunda Guerra Mundial, mientras investigaba el funcionamiento funcional de una computadora analógica, Claude Shannon desarrolló su fórmula. Debido a las restricciones de la guerra, el trabajo de Shannon no se publicó en ese momento y, en 1952, Mason redescubrió la misma fórmula.
William W. Happ generalizó la fórmula de Shannon para sistemas topológicamente cerrados. [50] La fórmula de Shannon-Happ se puede utilizar para derivar funciones de transferencia, sensibilidades y funciones de error. [51]
Para un conjunto consistente de relaciones unilaterales lineales, la fórmula de Shannon-Happ expresa la solución mediante sustitución directa (no iterativa). [51] [52]
El software de circuitos eléctricos de la NASA, NASAP, se basa en la fórmula de Shannon-Happ. [51] [52]
Ejemplos de gráficos de flujo de señal lineal
Amplificador de voltaje simple
Figura 1: SFG de un amplificador simple
La amplificación de una señal V 1 por un amplificador con ganancia a 12 se describe matemáticamente por
Esta relación representada por el gráfico de flujo de señal de la Figura 1 es que V 2 depende de V 1 pero implica que no hay dependencia de V 1 de V 2 . Ver Kou página 57. [53]
La interpretación de los parámetros es la siguiente: T = relación de retorno , G ∞ = ganancia directa del amplificador, G 0 = feedforward (lo que indica la posible naturaleza bilateral de la realimentación, posiblemente deliberada como en el caso de la compensación feedforward ). La Figura 3 tiene el aspecto interesante de que se parece a la Figura 2 para la red de dos puertos con la adición de la relación de retroalimentación adicional x 2 = T y 1 .
De esta expresión de ganancia resulta evidente una interpretación de los parámetros G 0 y G ∞ , a saber:
Hay muchos SFG posibles asociados con cualquier relación de ganancia particular. La Figura 4 muestra otro SFG para el modelo de ganancia asintótica que puede ser más fácil de interpretar en términos de un circuito. En este gráfico, el parámetro β se interpreta como un factor de retroalimentación y A como un "parámetro de control", posiblemente relacionado con una fuente dependiente en el circuito. Usando este gráfico, la ganancia es
Para conectarse al modelo de ganancia asintótica, los parámetros A y β no pueden ser parámetros de circuito arbitrarios, sino que deben relacionarse con la relación de retorno T mediante:
y a la ganancia asintótica como:
Sustituyendo estos resultados en la expresión de ganancia,
que es la fórmula del modelo de ganancia asintótica.
Circuito eléctrico que contiene una red de dos puertos.
Gráfico de flujo de señal de un circuito que contiene dos puertos. La ruta de avance desde la entrada hasta la salida se muestra en un color diferente. El rectángulo de línea de puntos encierra la parte del SFG que constituye los dos puertos.
La figura de la derecha muestra un circuito que contiene una red de dos puertos con parámetros y . V in es la entrada del circuito y V 2 es la salida. Las ecuaciones de dos puertos imponen un conjunto de restricciones lineales entre los voltajes y corrientes de sus puertos. Las ecuaciones terminales imponen otras restricciones. Todas estas limitaciones están representadas en el SFG (gráfico de flujo de señal) debajo del circuito. Sólo hay un camino de entrada a salida que se muestra en un color diferente y tiene una ganancia (de voltaje) de -R L y 21 . También hay tres bucles: -R en y 11 , -R L y 22 , R en y 21 R L y 12 . A veces, un bucle indica retroalimentación intencional, pero también puede indicar una restricción en la relación de dos variables. Por ejemplo, la ecuación que describe una resistencia dice que la relación entre el voltaje a través de la resistencia y la corriente a través de la resistencia es una constante que se llama resistencia. Esto se puede interpretar como que el voltaje es la entrada y la corriente es la salida, o la corriente es la entrada y el voltaje es la salida, o simplemente que el voltaje y la corriente tienen una relación lineal. Prácticamente todos los dispositivos pasivos de dos terminales en un circuito aparecerán en el SFG como un bucle.
El SFG y el esquema representan el mismo circuito, pero el esquema también sugiere el propósito del circuito. En comparación con el esquema, el SFG es incómodo pero tiene la ventaja de que la ganancia de entrada a salida se puede anotar mediante inspección utilizando la regla de Mason .
Mecatrónica: servo de posición con retroalimentación de bucles múltiples
Servo de posición angular y gráfico de flujo de señal. θ C = comando de ángulo deseado, θ L = ángulo de carga real, K P = ganancia del bucle de posición, V ωC = comando de velocidad, V ωM = voltaje de detección de velocidad del motor, K V = ganancia del bucle de velocidad, V IC = comando de corriente, V IM = voltaje de detección de corriente, K C = ganancia de bucle de corriente, V A = voltaje de salida del amplificador de potencia, L M = inductancia del motor, V M = voltaje a través de la inductancia del motor, I M = corriente del motor, R M = resistencia del motor, R S = corriente resistencia de detección, K M = constante de par del motor (Nm/amp), T = par, M = momento de inercia de todos los componentes giratorios α = aceleración angular, ω = velocidad angular, β = amortiguación mecánica, G M = constante de fuerza electromagnética del motor , G T = constante de ganancia de conversión del tacómetro. Hay una ruta de avance (que se muestra en un color diferente) y seis bucles de retroalimentación. Se supone que el eje de transmisión es lo suficientemente rígido como para no tratarlo como un resorte. Las constantes se muestran en negro y las variables en violeta.
Este ejemplo es representativo de un SFG (gráfico de flujo de señal) utilizado para representar un sistema de servocontrol e ilustra varias características de los SFG. Algunos de los bucles (bucle 3, bucle 4 y bucle 5) son bucles de retroalimentación extrínsecos diseñados intencionalmente. Estos se muestran con líneas de puntos. También hay bucles intrínsecos (bucle 0, bucle1, bucle2) que no son bucles de retroalimentación intencionales, aunque pueden analizarse como si lo fueran. Estos bucles se muestran con líneas continuas. Los bucles 3 y 4 también se conocen como bucles menores porque están dentro de un bucle más grande.
El camino hacia adelante comienza con θ C , el comando de posición deseada. Esto se multiplica por K P , que podría ser una constante o una función de la frecuencia. K P incorpora la ganancia de conversión del DAC y cualquier filtrado en la salida del DAC. La salida de K P es el comando de velocidad V ωC que se multiplica por K V , que puede ser una constante o una función de la frecuencia. La salida de K V es el comando actual, V IC que se multiplica por K C , que puede ser una constante o una función de la frecuencia. La salida de K C es el voltaje de salida del amplificador , VA . La corriente, IM , que circula por el devanado del motor es la integral del voltaje aplicado a la inductancia. El motor produce un par, T , proporcional a IM . Los motores de imanes permanentes tienden a tener una función lineal de corriente a par. La constante de conversión de corriente a par es K M . El par, T , dividido por el momento de inercia de la carga, M, es la aceleración, α , que se integra para dar la velocidad de carga ω que se integra para producir la posición de la carga, θ LC .
La trayectoria directa del bucle 0 afirma que la aceleración es proporcional al par y la velocidad es la integral de tiempo de la aceleración. El camino hacia atrás dice que a medida que aumenta la velocidad hay una fricción o arrastre que contrarresta el torque. El par sobre la carga disminuye proporcionalmente a la velocidad de la carga hasta que se alcanza el punto en que todo el par se utiliza para superar la fricción y la aceleración cae a cero. El bucle 0 es intrínseco.
Loop1 representa la interacción de la corriente de un inductor con su resistencia en serie interna y externa. La corriente a través de una inductancia es la integral de tiempo del voltaje a través de la inductancia. Cuando se aplica un voltaje por primera vez, todo aparece a través del inductor. Esto se muestra en el camino hacia adelante a través de . A medida que aumenta la corriente, el voltaje cae a través de la resistencia interna del inductor RM y la resistencia externa R S. Esto reduce el voltaje a través del inductor y está representado por la ruta de retroalimentación -(R M + R S ). La corriente continúa aumentando, pero a una velocidad cada vez menor hasta que alcanza el punto en el que todo el voltaje cae (R M + R S ). El bucle 1 es intrínseco.
Loop2 expresa el efecto de la fuerza electromagnética del motor. Siempre que un motor de imán permanente gira, actúa como un generador y produce un voltaje en sus devanados. No importa si la rotación es causada por un par aplicado al eje motor o por la corriente aplicada a los devanados. Este voltaje se conoce como EMF inverso. La ganancia de conversión de la velocidad de rotación a EMF posterior es G M . La polaridad del EMF posterior es tal que disminuye el voltaje a través de la inductancia del devanado. El bucle 2 es intrínseco.
El bucle 3 es extrínseco. La corriente en el devanado del motor pasa a través de una resistencia sensora. El voltaje, VIM , desarrollado a través de la resistencia de detección se retroalimenta al terminal negativo del amplificador de potencia KC . Esta retroalimentación hace que el amplificador de voltaje actúe como una fuente de corriente controlada por voltaje. Dado que el par del motor es proporcional a la corriente del motor, el subsistema V IC para el par de salida actúa como una fuente de par controlada por voltaje. Este subsistema puede denominarse "bucle de corriente" o "bucle de torsión". El bucle 3 disminuye efectivamente los efectos del bucle 1 y del bucle 2.
El bucle 4 es extrínseco. Un tacómetro (en realidad, un generador de CC de baja potencia) produce un voltaje de salida V ωM que es proporcional a su velocidad angular. Este voltaje se alimenta a la entrada negativa de KV . Esta retroalimentación hace que el subsistema desde V ωC hasta la velocidad angular de la carga actúe como una fuente de voltaje a velocidad. Este subsistema puede denominarse "bucle de velocidad". El bucle 4 disminuye efectivamente los efectos del bucle 0 y del bucle 3.
El bucle 5 es extrínseco. Este es el circuito de retroalimentación de posición general. La retroalimentación proviene de un codificador angular que produce una salida digital. La posición de salida se resta de la posición deseada mediante hardware digital que controla un DAC que controla KP . En el SFG, la ganancia de conversión del DAC se incorpora a KP .
Consulte la regla de Mason para el desarrollo de la fórmula de ganancia de Mason para ver este ejemplo.
Terminología y clasificación de gráficos de flujo de señales.
Existe cierta confusión en la literatura sobre qué es un gráfico de flujo de señales; Henry Paynter , inventor de los gráficos de bonos , escribe: "Pero gran parte del declive de los gráficos de flujo de señales [...] se debe en parte a la noción errónea de que las ramas deben ser lineales y los nodos deben ser sumativos. Ninguna suposición fue abrazado por el propio Mason!" [55]
Normas que cubren gráficos de flujo de señales.
IEEE Std 155-1960, Estándares IEEE sobre circuitos: definiciones de términos para gráficos de flujo de señales lineales, 1960.
Este estándar IEEE define un gráfico de flujo de señales como una red de ramas dirigidas que representan señales dependientes e independientes como nodos . Las ramas entrantes transportan señales de rama a las señales del nodo dependiente. Una señal de nodo dependiente es la suma algebraica de las señales de rama entrantes en ese nodo, es decir, los nodos son sumativos.
Gráfico de flujo de señal de transición de estado
Gráfico de flujo de señal de transición de estado. Cada condición inicial se considera como una fuente (se muestra en azul).
Un SFG de transición de estado o diagrama de estado es un diagrama de simulación para un sistema de ecuaciones, incluidas las condiciones iniciales de los estados. [56]
Diagrama de flujo cerrado
Un sistema RC simple y su diagrama de flujo cerrado. Se introduce una transmitancia "ficticia" Z(s) para cerrar el sistema. [50]
Los diagramas de flujo cerrados describen sistemas cerrados y se han utilizado para proporcionar una base teórica rigurosa para técnicas topológicas de análisis de circuitos. [50]
La terminología para la teoría del diagrama de flujo cerrado incluye:
Nodo contributivo. Punto de suma de dos o más señales entrantes que da como resultado una sola señal saliente.
Nodo distributivo. Punto de muestreo para dos o más señales salientes resultantes de una sola señal entrante.
Nodo compuesto. Contracción de un nodo contributivo y un nodo distributivo.
Nodo estrictamente dependiente y estrictamente independiente. Un nodo estrictamente independiente representa una fuente independiente; un nodo estrictamente dependiente representa un metro.
Diagramas de flujo abiertos y cerrados. Un diagrama de flujo abierto contiene nodos estrictamente dependientes o estrictamente independientes; de lo contrario, es un diagrama de flujo cerrado.
Gráficos de flujo no lineales
Mason introdujo gráficos de flujo lineales y no lineales. Para aclarar este punto, Mason escribió: "Un gráfico de flujo lineal es aquel cuyas ecuaciones asociadas son lineales". [2]
Ejemplos de funciones de rama no lineales
Si denotamos por x j la señal en el nodo j , los siguientes son ejemplos de funciones de nodo que no pertenecen a un sistema lineal invariante en el tiempo :
Ejemplos de modelos de gráficos de flujo de señales no lineales
Aunque generalmente no se pueden transformar entre representaciones en el dominio del tiempo y en el dominio de la frecuencia para el análisis de la teoría de control clásica, los gráficos de flujo de señales no lineales se pueden encontrar en la literatura de ingeniería eléctrica. [57] [58]
Los gráficos de flujo de señales no lineales también se pueden encontrar en las ciencias biológicas, por ejemplo, el modelo del sistema cardiovascular del Dr. Arthur Guyton . [59]
Aplicaciones de las técnicas SFG en diversos campos de la ciencia.
^ abc CE Shannon (enero de 1942). "La teoría y diseño de máquinas de ecuaciones diferenciales lineales". Control de incendios del Comité de Investigación de Defensa Nacional de EE. UU.: Informe 411, Sección D-2.{{cite journal}}: Cite Journal requiere |journal=( ayuda ) Reimpreso en NJA Sloane; Aaron D. Wyner, eds. (1993). Claude E. Shannon: artículos recopilados. Prensa Wiley IEEE. pag. 514.ISBN _ 978-0-7803-0434-5.
^ abcdef Mason, Samuel J. (septiembre de 1953). "Teoría de la retroalimentación: algunas propiedades de los gráficos de flujo de señales" (PDF) . Actas del IRE . 41 (9): 1144-1156. doi :10.1109/jrproc.1953.274449. S2CID 17565263. El diagrama de flujo puede interpretarse como un sistema de transmisión de señales en el que cada nodo es una pequeña estación repetidora. La estación recibe señales a través de las ramas entrantes, combina la información de alguna manera y luego transmite los resultados a lo largo de cada rama saliente.
^ Jørgen Bang-Jensen; Gregorio Z. Gutin (2008). Digrafos. Saltador. ISBN9781848009981.
^ Bela Bollobas (1998). Teoría de grafos moderna. Medios de ciencia y negocios de Springer. pag. 8.ISBN _9781461206194.i
^ SJ Mason (julio de 1956). "Teoría de la retroalimentación: otras propiedades de los gráficos de flujo de señales". Actas del IRE . 44 (7): 920–926. doi :10.1109/JRPROC.1956.275147. hdl : 1721.1/4778 . S2CID 18184015.Versión en línea encontrada en el Laboratorio de Investigación de Electrónica del MIT.
^ Chen, Wai Kai (1976). Teoría de grafos aplicada: gráficos y redes eléctricas. Elsevier . ISBN9781483164151.(WKC 1976, pág. 167) harv error: no target: CITEREFWKC1976 (help)
^ Lorens, Charles Stanton (15 de julio de 1956), Vogel, Dan (ed.), Informe técnico 317 - Teoría y aplicaciones de gráficos de flujo (PDF) , Laboratorio de investigación de electrónica, MIT
^ (WKC 1976, pag.169) harv error: no target: CITEREFWKC1976 (help)
^ abc Louis PA Robichaud; Mauricio Boisvert; Juan Robert (1962). "Prefacio". Gráficos de flujo de señales y aplicaciones . Serie de ingeniería eléctrica de Prentice-Hall. Prentice Hall. pag. X. COMO EN B0000CLM1G.
^ Horacio M. Trent (1955). "Isomorfismos entre gráficos lineales orientados y sistemas físicos agrupados". Revista de la Sociedad de Acústica de América . 27 (3): 500–527. Código bibliográfico : 1955ASAJ...27..500T. doi :10.1121/1.1907949.
^ Narsingh Deo (2004). Teoría de grafos con aplicaciones a la ingeniería y la informática. PHI Aprendizaje Pvt. Limitado. Ltd. pág. 418.ISBN _9788120301450.
^ Kofránek, J; Mateják, M; Privitzer, P; Tribula, M (2008), Modelado causal o acausal: trabajo para humanos o trabajo para máquinas (PDF) , Technical Computing Prague 2008. Actas de la conferencia., Praga, p. 16, archivado desde el original (PDF) el 29 de diciembre de 2009.{{citation}}: CS1 maint: location missing publisher (link)
^ J Choma, Jr (abril de 1990). "Análisis de flujo de señales de redes de retroalimentación". Transacciones IEEE sobre circuitos y sistemas . 37 (4): 455–463. Código Bib : 1990ITCS...37..455C. doi : 10.1109/31.52748.
^ Wai-Kai Chen (1971). "Capítulo 3: Soluciones gráficas dirigidas de ecuaciones algebraicas lineales". Teoría de grafos aplicada . Pub de Holanda Septentrional. Co.p. 140.ISBN _978-0444101051.Parcialmente accesible mediante la función de búsqueda interna de Amazon.
^
Véase, por ejemplo, Katsuhiko Ogata (2004). "Capítulo 3-9: Representación gráfica de flujo de señales de sistemas lineales". Ingeniería de control moderna (4ª ed.). Prentice Hall. págs. 106 y siguientes . ISBN 978-0130609076.Sin embargo, no existe una correspondencia uno a uno: Narsingh Deo (2004). Teoría de grafos con aplicaciones a la ingeniería y la informática. PHI Aprendizaje Pvt. Limitado. Ltd. pág. 418.ISBN _ 9788120301450.
^ ab Kuo, Benjamín C. (1967). Sistemas de control automático (2ª ed.). Prentice Hall. págs. 59–60.
^ Luis PA Robichaud; Mauricio Boisvert; Juan Robert (1962). "§1-4: Definiciones y terminología". Gráficos de flujo de señales y aplicaciones . Serie de ingeniería eléctrica de Prentice-Hall. Prentice Hall. pag. 8. COMO EN B0000CLM1G.
^ J.R. Abrahams; GP Coverley (2014). "Capítulo 2: Operaciones con diagrama de flujo". Análisis del flujo de señales: la Commonwealth y la biblioteca internacional . Elsevier. págs. 21 y siguientes . ISBN9781483180700.
^ Isaac M. Horowitz (2013). "Reducción de gráficos de flujo de señales". Síntesis de Sistemas de Retroalimentación . Elsevier. págs. 18 y siguientes . ISBN9781483267708.
^ (Ogata 2002, págs.68, 106)
^ (Ogata 2002, págs.105, 106)
^ ab (Henley 1973, pag.12) harv error: no target: CITEREFHenley1973 (help)
^ (Phang 2001, pag.37) harv error: no target: CITEREFPhang2001 (help)
^ Se pueden encontrar ejemplos de reducción del gráfico de flujo de señales en (Robichaud 1962, p. 186, Sec. 7-3 Reducción algebraica de gráficos de flujo de señales) harv error: no target: CITEREFRobichaud1962 (help)
^ ab (Robichaud 1962, págs. 9-10, secciones 1-5: reducción del gráfico de flujo) harv error: no target: CITEREFRobichaud1962 (help)
^ (Robichaud 1962, págs. 182, 183 Sec. 7-1, 7-2 del Capítulo 7: Reducción algebraica de gráficos de flujo de señales utilizando una computadora digital) harv error: no target: CITEREFRobichaud1962 (help)
^ (Robichaud 1962, p. 185, Sec. 7-2: Generalización de gráficos de flujo) harv error: no target: CITEREFRobichaud1962 (help)
^ (Robichaud 1962, págs. 9, secciones 1 a 5 REDUCCIÓN DEL GRÁFICO DE FLUJO) harv error: no target: CITEREFRobichaud1962 (help)
^ Fakhfakh, Mourad; Tlelo-Cuautle, Esteban; V. Fernández, Francisco (2012). "Sección 4.1.2 Álgebra de gráficos de flujo de señales". En Fakhfakh (ed.). Diseño de Circuitos Analógicos Mediante Análisis Simbólico . Editores científicos de Bentham. pag. 418.ISBN _978-1-60805-425-1.
^ Carl Engelman , El legado de MATHLAB 68 , publicado en Actas SYMSAC '71 Actas del segundo simposio ACM sobre manipulación simbólica y algebraica, páginas 29-41 [1]
^ "... resolver un conjunto de ecuaciones algebraicas lineales simultáneas. Este problema, generalmente resuelto mediante métodos matriciales, también se puede resolver mediante la teoría de grafos". Deo, Narsingh (1974). Teoría de grafos con aplicaciones a la ingeniería y la informática . Prentice-Hall de la India. pag. 416.ISBN _ 978-81-203-0145-0.también en línea en [2]
^ Deo, Narsingh (1974). Teoría de grafos con aplicaciones a la ingeniería y la informática . Prentice-Hall de la India. pag. 417.ISBN _978-81-203-0145-0.también en línea en [3]
^
"Un gráfico de flujo de señales puede considerarse como una versión simplificada de un diagrama de bloques... para causa y efecto... de sistemas lineales... podemos considerar que los gráficos de flujo de señales están restringidos por reglas matemáticas más rígidas. , mientras que el uso de la notación de diagrama de bloques es menos estricto." Kuo, Benjamín C. (1991). Sistemas de control automático (6ª ed.). Prentice Hall. pag. 77.ISBN _ 978-0-13-051046-4.
^ Gene F. Franklin; et al. (29 de abril de 2014). "Reducción del diagrama de bloques del Apéndice W.3". Control de Retroalimentación de Sistemas Dinámicos . Prentice Hall.
^ VUBakshi UABakshi (2007). "Tabla 5.6: Comparación de métodos de diagrama de bloques y gráfico de flujo de señales". Ingeniería de control . Publicaciones técnicas. pag. 120.ISBN _9788184312935.
^ Un Anand Kumar (2014). "Tabla: Comparación de diagrama de bloques y métodos de flujo de señales". Sistemas de control (2ª ed.). PHI Aprendizaje Pvt. Limitado. Ltd. pág. 165.ISBN _9788120349391.
^ HA Barker; M Chen; P. Townsend (2014). "Algoritmos para transformaciones entre diagramas de bloques y gráficos de flujo digitales". Diseño asistido por computadora en sistemas de control 1988: artículos seleccionados del cuarto simposio de la IFAC, Beijing, República Popular China, 23 al 25 de agosto de 1988 . Elsevier. págs. 281 y siguientes . ISBN9781483298795.
^
Por ejemplo, consulte Arthur GO Mutambara (1999). Diseño y Análisis de Sistemas de Control. Prensa CRC. pag. 238.ISBN _ 9780849318986.
^ Katsuhiko Ogata (1997). "Gráficos de flujo de señales". Ingeniería de control moderna (4ª ed.). Prentice Hall. pag. 104.ISBN _978-0130432452.
^ Wolfgang Borutzky (2009). Metodología Bond Graph: desarrollo y análisis de modelos de sistemas dinámicos multidisciplinarios. Medios de ciencia y negocios de Springer. pag. 10.ISBN _9781848828827.
^ James J. Callahan (2000). "Causalidad: Definición 2.10". La geometría del espacio-tiempo: una introducción a la relatividad general y especial . Medios de ciencia y negocios de Springer. pag. 76.ISBN _9780387986418.
^ John JH Miller; Robert Vichnevetsky (22 al 26 de julio de 1991). John JH Miller; Robert Vichnevetsky (eds.). IMACS '91, Actas del 13º Congreso Mundial IMACS sobre Computación y Matemáticas Aplicadas: 22 al 26 de julio de 1991, Trinity College, Dublín, Irlanda. Asociación Internacional de Matemáticas y Computación en Simulación.
^ François E. Cellier; Ernesto Kofman (2006). Simulación de sistemas continuos. Medios de ciencia y negocios de Springer. pag. 15.ISBN _9780387261027.
^ Véase, por ejemplo, Stephan Lewandowsky; Simón Farrell (2010). Modelado computacional en cognición: principios y práctica. Publicaciones SAGE. ISBN 9781452236193.
^ Dorf, Richard C.; Obispo, Robert H. (2001). «Capítulo 2.-1: Introducción» (PDF) . Sistemas de control modernos . Prentice Hall. pag. 2.ISBN _978-0-13-030660-9.
^ Antão, BAA; Brodersen, AJ (junio de 1995). "ARCHGEN: Síntesis automatizada de sistemas analógicos". Transacciones IEEE en sistemas de integración a muy gran escala (VLSI) . 3 (2): 231–244. doi : 10.1109/92.386223.
^ Doboli, A.; Dhanwada, N.; Vemuri, R. (mayo de 2000). "Una técnica heurística para la generación de arquitectura a nivel de sistema a partir de representaciones de gráficos de flujo de señales de sistemas analógicos". 2000 Simposio internacional IEEE sobre circuitos y sistemas. Tecnologías emergentes para el siglo XXI. Actas (IEEE Cat No.00CH36353) . Circuitos y Sistemas, 2000. Actas. ISCAS 2000 Ginebra. El Simposio Internacional IEEE 2000 sobre. vol. 3. págs. 181–184. CiteSeerX 10.1.1.59.304 . doi :10.1109/ISCAS.2000.856026. ISBN978-0-7803-5482-1. S2CID 13948702.
^ abc Happ, William W. (1966). "Técnicas de diagrama de flujo para sistemas cerrados". Transacciones IEEE sobre sistemas aeroespaciales y electrónicos . AES-2 (3): 252–264. Código Bib :1966ITAES...2..252H. doi :10.1109/TAES.1966.4501761. S2CID 51651723.
^ abc Potasa, Hanan; McNamee, Lawrence P. (1968). "Aplicación de técnicas unilaterales y gráficas al análisis de circuitos lineales: Solución por métodos no iterativos". Actas, Conferencia Nacional ACM : 367–378. doi : 10.1145/800186.810601 . S2CID 16623657.
^ ab Okrent, Howard; McNamee, Lawrence P. (1970). "3. 3 Teoría del diagrama de flujo" (PDF) . Manual del usuario y programador NASAP-70 . Los Ángeles, California: Escuela de Ingeniería y Ciencias Aplicadas, Universidad de California en Los Ángeles. págs. 3–9.
^ Kou (1967, pág.57)
^ Arnaldo D'Amico, Christian Falconi, Gianluca Giustolisi, Gaetano Palumbo (abril de 2007). "Resistencia de los amplificadores de retroalimentación: una representación novedosa" (PDF) . Transacciones IEEE sobre circuitos y sistemas - II Express Briefs . 54 (4): 298–302. CiteSeerX 10.1.1.694.8450 . doi :10.1109/tcsii.2006.889713. S2CID 10154732.{{cite journal}}: CS1 maint: multiple names: authors list (link)
^ Paynter, Henry (1992). "Una prehistoria epistémica de los gráficos de bonos" (PDF) : 10, 15 páginas.{{cite journal}}: Citar diario requiere |journal=( ayuda )
^ Houpis, Constantino H.; Sheldon, Stuart N. (2013). "sección 8.8". Análisis y diseño de sistemas de control lineal con MATLAB®, sexta edición . Boca Ratón, FL: prensa CRC. págs. 171-172. ISBN9781466504264.
^ Por ejemplo: Baran, Thomas A.; Oppenhiem, Alan V. (2011), "Inversión de sistemas no lineales y variables en el tiempo", 2011 Reunión educativa sobre procesamiento de señales digitales y procesamiento de señales (DSP/SPE) , Taller sobre procesamiento de señales digitales y Taller educativo sobre procesamiento de señales IEEE (DSP/SPE) , IEEE, págs. 283–288, CiteSeerX 10.1.1.695.7460 , doi :10.1109/DSP-SPE.2011.5739226, ISBN 978-1-61284-226-4, S2CID 5758954
^ ab Guilherme, J.; Horta, Carolina del Norte; Franca, JE (1999). SÍNTESIS SIMBÓLICA DE CONVERTIDORES DE DATOS NO LINEALES (PDF) .
^ Hall, John E. (1 de noviembre de 2004). "El uso pionero del análisis de sistemas para estudiar la regulación del gasto cardíaco". Revista americana de fisiología. Fisiología Reguladora, Integrativa y Comparada . 287 (5): R1009–R1011. doi :10.1152/classicessays.00007.2004. ISSN 0363-6119. PMID 15475497. Figura 2, modelo informático del sistema cardiovascular de Arthur Guyton, descargar jpeg{{cite journal}}: Enlace externo en |quote=( ayuda )
^ BRZOZOWSKI, JA; McCLUSKEY, EJ (1963). Técnicas de gráficos de flujo de señales para diagramas de estado de circuitos secuenciales . Transacciones IEEE en computadoras electrónicas. IEEE. pag. 97.
^ Barry, JR, Lee, EA y Messerschmitt, DG (2004). Comunicación digital (Tercera ed.). Nueva York: Springer. pag. 86.ISBN _978-0-7923-7548-7.{{cite book}}: CS1 maint: multiple names: authors list (link)
^ Feliz, William W. (1964). Goldberg, MF (ed.). "Aplicación de técnicas de diagramas de flujo a la solución de problemas de confiabilidad". Física de fallas en electrónica (AD434/329): 375–423. doi :10.1109/IRPS.1963.362257.
^ Hall, John E. (23 de agosto de 2004). "El uso pionero del análisis de sistemas para estudiar la regulación del gasto cardíaco". Am J Physiol Regul Integr Comp Physiol . 287 (5): R1009–R1011. doi :10.1152/classicessays.00007.2004. PMID 15475497.
^ (Robichaud 1962, capítulo 5 Simulación directa en computadoras analógicas mediante gráficos de flujo de señal) harv error: no target: CITEREFRobichaud1962 (help)
^ Izhikevich, Eugene M (febrero de 2006). "Policronización: cálculo con picos". Computación neuronal . 18 (2): 245–282. doi :10.1162/089976606775093882. PMID 16378515. S2CID 14253998.
^ Dolores-Cuenca, E.& Arciniega-Nevárez, JA& Nguyen, A.& Zou, AY& Van Popering, L.& Crock, N.& Erlebacher, G.& Mendoza-Cortes, JL (abril de 2023). "Policcronía como Chinampas". Algoritmos . 16 (4): 193. arXiv : 2103.15265 . doi : 10.3390/a16040193 .{{cite journal}}: CS1 maint: multiple names: authors list (link)
Referencias
Ernest J. Henley y RA Williams (1973). Teoría de grafos en la ingeniería moderna; Diseño, control, optimización y análisis de confiabilidad asistidos por computadora . Prensa académica. ISBN 978-0-08-095607-7.Libro dedicado casi en su totalidad a este tema.
Kou, Benjamin C. (1967), Sistemas de control automático , Prentice Hall
Robichaud, Luis PA; Mauricio Boisvert; Juan Robert (1962). Gráficos de flujo de señales y aplicaciones. Serie de ingeniería eléctrica de Prentice-Hall. Englewood Cliffs, Nueva Jersey: Prentice Hall. págs. xiv, 214 p.
Deo, Narsingh (1974), Teoría de grafos con aplicaciones a la ingeniería y la informática, PHI Learning Pvt. Limitado. Ltd., pág. 418, ISBN 978-81-203-0145-0
K Thulasiramen; Enjambre MNS (2011). "§6.11 Los gráficos de Coates y Mason". Gráficos: Teoría y algoritmos . John Wiley e hijos. págs. 163 y siguientes . ISBN 9781118030257.
Ogata, Katsuhiko (2002). "Sección 3-9 Gráficos de flujo de señal". Ingeniería de control moderna, cuarta edición . Prentice-Hal. ISBN 978-0-13-043245-2.
Wai-Kai Chen (1976). Teoría de grafos aplicada . Compañía Editorial de Holanda Septentrional. ISBN 978-0720423624.Capítulo 3 para lo esencial, pero las aplicaciones se encuentran dispersas a lo largo del libro.
Wai-Kai Chen (mayo de 1964). "Algunas aplicaciones de gráficas lineales". Contrato DA-28-043-AMC-00073 (E) . Laboratorio de Ciencias Coordinado, Universidad de Illinois, Urbana. Archivado desde el original el 10 de enero de 2015.
K. Thulasiraman y MNS Swamy (1992). Gráficos: teoría y algoritmos . John Wiley e hijos. 6.10-6.11 para la idea matemática esencial. ISBN 978-0-471-51356-8.
Shu-Park Chan (2006). "Teoría de grafos". En Richard C. Dorf (ed.). Circuitos, señales y procesamiento del habla y la imagen (3ª ed.). Prensa CRC. § 3.6. ISBN 978-1-4200-0308-6.Compara los enfoques de gráficos de Mason y Coates con el enfoque del árbol k de Maxwell.
RF Hoskins (2014). "Análisis de diagramas de flujo y diagramas de flujo de señales de sistemas lineales". En SR Deards (ed.). Desarrollos recientes en la teoría de redes: actas del simposio celebrado en la Facultad de Aeronáutica, Cranfield, septiembre de 1961 . Elsevier. ISBN 9781483223568.Una comparación de la utilidad del gráfico de flujo de Coates y el gráfico de flujo de Mason.
enlaces externos
El Wikibook Control Systems tiene una página sobre el tema: Ingeniería eléctrica: construcción de un diagrama de flujo para un circuito RC.
El Wikibook Control Systems tiene una página sobre el tema: Ejemplos de reducción sistemática
ML Edwards: parámetros S, gráficos de flujo de señales y otras representaciones matriciales. Todos los derechos reservados.
H Schmid: Gráficos de flujo de señales en 12 lecciones breves
Sistemas de control/Diagramas de flujo de señales en Wikilibros
Medios relacionados con gráficos de flujo de señales en Wikimedia Commons