La resolución óptica describe la capacidad de un sistema de imágenes para captar detalles del objeto que se está captando. Un sistema de imágenes puede tener muchos componentes individuales, entre ellos una o más lentes y/o componentes de grabación y visualización. Cada uno de ellos contribuye (si se diseña y alinea adecuadamente) a la resolución óptica del sistema; el entorno en el que se captan las imágenes suele ser otro factor importante.
La resolución depende de la distancia entre dos puntos de radiación distinguibles. Las secciones siguientes describen las estimaciones teóricas de la resolución, pero los valores reales pueden diferir. Los resultados que se muestran a continuación se basan en modelos matemáticos de discos de Airy , que suponen un nivel adecuado de contraste. En sistemas de bajo contraste, la resolución puede ser mucho menor que la predicha por la teoría que se describe a continuación. Los sistemas ópticos reales son complejos y las dificultades prácticas a menudo aumentan la distancia entre fuentes puntuales distinguibles.
La resolución de un sistema se basa en la distancia mínima a la que los puntos pueden distinguirse como individuos. Se utilizan varios estándares para determinar, cuantitativamente, si los puntos pueden distinguirse o no. Uno de los métodos especifica que, en la línea entre el centro de un punto y el siguiente, el contraste entre la intensidad máxima y mínima sea al menos un 26% menor que la máxima. Esto corresponde a la superposición de un disco de Airy sobre el primer anillo oscuro del otro. Este estándar de separación también se conoce como criterio de Rayleigh . En símbolos, la distancia se define de la siguiente manera: [1]
dónde
Esta fórmula es adecuada para la microscopía confocal, pero también se utiliza en la microscopía tradicional. En los microscopios confocales de escaneo láser , a menudo se utiliza la mitad del máximo de ancho completo (FWHM) de la función de dispersión de puntos para evitar la dificultad de medir el disco de Airy. [1] Esto, combinado con el patrón de iluminación rasterizado, da como resultado una mejor resolución, pero sigue siendo proporcional a la fórmula basada en Rayleigh indicada anteriormente.
También es común en la literatura sobre microscopía una fórmula para la resolución que trata las preocupaciones mencionadas anteriormente sobre el contraste de manera diferente. [2] La resolución predicha por esta fórmula es proporcional a la fórmula basada en Rayleigh, y difiere en aproximadamente un 20 %. Para estimar la resolución teórica, puede ser adecuada.
Cuando se utiliza un condensador para iluminar la muestra, también debe incluirse la forma del lápiz de luz que emana del condensador. [3]
En un microscopio correctamente configurado, .
Las estimaciones de resolución anteriores son específicas para el caso en el que dos muestras idénticas muy pequeñas irradian de manera incoherente en todas las direcciones. Se deben tener en cuenta otras consideraciones si las fuentes irradian a diferentes niveles de intensidad, son coherentes, grandes o irradian en patrones no uniformes.
La capacidad de una lente para resolver detalles suele estar determinada por la calidad de la lente, pero en última instancia está limitada por la difracción . La luz que proviene de una fuente puntual en el objeto se difracta a través de la apertura de la lente de manera que forma un patrón de difracción en la imagen, que tiene un punto central y anillos brillantes circundantes, separados por nulos oscuros; este patrón se conoce como patrón de Airy y el lóbulo brillante central como disco de Airy . El radio angular del disco de Airy (medido desde el centro hasta el primer nulo) viene dado por: donde
Dos puntos adyacentes en el objeto dan lugar a dos patrones de difracción. Si la separación angular de los dos puntos es significativamente menor que el radio angular del disco de Airy, entonces los dos puntos no pueden resolverse en la imagen, pero si su separación angular es mucho mayor que esto, se forman imágenes distintas de los dos puntos y, por lo tanto, pueden resolverse. Rayleigh definió el " criterio de Rayleigh ", un tanto arbitrario, según el cual dos puntos cuya separación angular es igual al radio del disco de Airy hasta el primer nulo pueden considerarse resueltos. Se puede ver que cuanto mayor sea el diámetro de la lente o su apertura, mayor será la resolución. Los telescopios astronómicos tienen lentes cada vez más grandes para poder "ver" detalles cada vez más finos en las estrellas.
Sin embargo, sólo las lentes de la más alta calidad tienen una resolución limitada por difracción y, normalmente, la calidad de la lente limita su capacidad para resolver detalles. Esta capacidad se expresa mediante la función de transferencia óptica , que describe la variación espacial (angular) de la señal de luz como una función de la frecuencia espacial (angular). Cuando la imagen se proyecta sobre una superficie plana, como una película fotográfica o un detector de estado sólido, la frecuencia espacial es el dominio preferido, pero cuando la imagen se refiere únicamente a la lente, se prefiere la frecuencia angular. La OTF se puede desglosar en los componentes de magnitud y fase de la siguiente manera: donde
La OTF tiene en cuenta la aberración , algo que no ocurre con la expresión de frecuencia límite anterior. La magnitud se conoce como función de transferencia de modulación (MTF) y la parte de fase se conoce como función de transferencia de fase (PTF) .
En los sistemas de obtención de imágenes, el componente de fase no suele ser captado por el sensor. Por lo tanto, la medida importante con respecto a los sistemas de obtención de imágenes es la MTF.
La fase es de vital importancia para la óptica adaptativa y los sistemas holográficos.
Algunos sensores ópticos están diseñados para detectar diferencias espaciales en la energía electromagnética . Entre ellos se incluyen películas fotográficas , dispositivos de estado sólido ( CCD , sensores CMOS y detectores infrarrojos como PtSi e InSb ), detectores de tubo ( vidicones , plumbicones y tubos fotomultiplicadores utilizados en dispositivos de visión nocturna), detectores de barrido (utilizados principalmente para IR), detectores piroeléctricos y detectores microbolómetros . La capacidad de un detector de este tipo para resolver esas diferencias depende principalmente del tamaño de los elementos de detección.
La resolución espacial se expresa normalmente en pares de líneas por milímetro (lppmm), líneas (de resolución, principalmente para vídeo analógico), contraste vs. ciclos/mm o MTF (el módulo de OTF). La MTF se puede encontrar tomando la transformada de Fourier bidimensional de la función de muestreo espacial. Los píxeles más pequeños dan como resultado curvas MTF más anchas y, por lo tanto, una mejor detección de energía de mayor frecuencia.
Esto es análogo a tomar la transformada de Fourier de una función de muestreo de señal ; en ese caso, el factor dominante es el período de muestreo, que es análogo al tamaño del elemento de la imagen ( píxel ).
Otros factores incluyen el ruido de píxeles, la diafonía de píxeles, la penetración del sustrato y el factor de relleno.
Un problema común entre los no técnicos es el uso del número de píxeles del detector para describir la resolución. Si todos los sensores tuvieran el mismo tamaño, esto sería aceptable. Como no lo tienen, el uso del número de píxeles puede ser engañoso. Por ejemplo, una cámara de 2 megapíxeles con píxeles cuadrados de 20 micrómetros tendrá una resolución peor que una cámara de 1 megapíxel con píxeles de 8 micrómetros, en igualdad de condiciones.
Para la medición de la resolución, los fabricantes de películas suelen publicar un gráfico de la respuesta (%) frente a la frecuencia espacial (ciclos por milímetro). El gráfico se deriva experimentalmente. Los fabricantes de cámaras y sensores de estado sólido normalmente publican especificaciones a partir de las cuales el usuario puede derivar una MTF teórica según el procedimiento que se describe a continuación. Algunos también pueden publicar curvas MTF, mientras que otros (especialmente los fabricantes de intensificadores) publicarán la respuesta (%) en la frecuencia de Nyquist o, alternativamente, publicarán la frecuencia en la que la respuesta es del 50%.
Para encontrar una curva MTF teórica para un sensor, es necesario conocer tres características del sensor: el área de detección activa, el área que comprende el área de detección y las estructuras de interconexión y soporte ("superficie"), y el número total de esas áreas (el recuento de píxeles). Casi siempre se proporciona el recuento total de píxeles. A veces se proporcionan las dimensiones generales del sensor, a partir de las cuales se puede calcular el área de superficie. Ya sea que el área de superficie se proporcione o se derive, si no se proporciona el área de píxeles activos, se puede derivar del área de superficie y el factor de relleno , donde el factor de relleno es la relación entre el área activa y el área de superficie dedicada. donde
En la notación de Gaskill, el área de detección es una función 2D comb( x , y ) de la distancia entre píxeles (el pitch ), convolucionada con una función 2D rect( x , y ) del área activa del píxel, limitada por una función 2D rect( x , y ) de la dimensión general del sensor. La transformada de Fourier de esto es una función gobernada por la distancia entre píxeles, convolucionada con una función gobernada por el número de píxeles y multiplicada por la función correspondiente al área activa. Esa última función sirve como una envolvente general de la función MTF; siempre que el número de píxeles sea mucho mayor que uno, entonces el tamaño del área activa domina la MTF.
Función de muestreo:
donde el sensor tiene M × N píxeles
Un sistema de obtención de imágenes que funciona a 24 fotogramas por segundo es, en esencia, un sistema de muestreo discreto que toma muestras de un área 2D. Las mismas limitaciones descritas por Nyquist se aplican a este sistema y a cualquier otro sistema de muestreo de señales.
Todos los sensores tienen una respuesta temporal característica. La película está limitada tanto en los extremos de resolución corta como de resolución larga por la ruptura de reciprocidad . Por lo general, se considera que estos valores son superiores a 1 segundo y inferiores a 1/10 000 de segundo. Además, la película requiere un sistema mecánico para avanzarla a través del mecanismo de exposición o un sistema óptico móvil para exponerla. Estos limitan la velocidad a la que se pueden exponer los fotogramas sucesivos.
Los sensores CCD y CMOS son las opciones modernas para los sensores de vídeo. Los CCD tienen una velocidad limitada por la velocidad a la que se puede mover la carga de un sitio a otro. Los CMOS tienen la ventaja de tener celdas direccionables individualmente, lo que ha dado lugar a su ventaja en la industria de la fotografía de alta velocidad .
Los vidicones, plumbicones e intensificadores de imagen tienen aplicaciones específicas. La velocidad a la que se pueden muestrear depende de la tasa de decaimiento del fósforo utilizado. Por ejemplo, el fósforo P46 tiene un tiempo de decaimiento de menos de 2 microsegundos, mientras que el tiempo de decaimiento del P43 es del orden de 2-3 milisegundos. Por lo tanto, el P43 no se puede utilizar a velocidades de cuadro superiores a 1000 cuadros por segundo (cuadro/s). Consulte § Enlaces externos para obtener información sobre fósforos.
Los detectores piroeléctricos responden a los cambios de temperatura, por lo que no se detectará una escena estática, por lo que requieren choppers . También tienen un tiempo de decaimiento, por lo que la respuesta temporal del sistema piroeléctrico será un paso de banda, mientras que los otros detectores comentados serán un paso bajo.
Si los objetos dentro de la escena están en movimiento en relación con el sistema de imágenes, el desenfoque de movimiento resultante dará como resultado una resolución espacial menor. Los tiempos de integración cortos minimizarán el desenfoque, pero los tiempos de integración están limitados por la sensibilidad del sensor. Además, el movimiento entre fotogramas en las películas afectará los esquemas de compresión de películas digitales (por ejemplo, MPEG-1, MPEG-2). Finalmente, existen esquemas de muestreo que requieren movimiento real o aparente dentro de la cámara (espejos de escaneo, obturadores giratorios) que pueden dar como resultado una representación incorrecta del movimiento de la imagen. Por lo tanto, la sensibilidad del sensor y otros factores relacionados con el tiempo tendrán un impacto directo en la resolución espacial.
La resolución espacial de los sistemas digitales (por ejemplo, HDTV y VGA ) se fija independientemente del ancho de banda analógico porque cada píxel se digitaliza, se transmite y se almacena como un valor discreto. Las cámaras, grabadoras y pantallas digitales deben seleccionarse de modo que la resolución sea idéntica de una cámara a otra. Sin embargo, en los sistemas analógicos, la resolución de la cámara, la grabadora, el cableado, los amplificadores, los transmisores, los receptores y la pantalla pueden ser independientes y la resolución general del sistema está determinada por el ancho de banda del componente de menor rendimiento.
En los sistemas analógicos, cada línea horizontal se transmite como una señal analógica de alta frecuencia. Por lo tanto, cada elemento de la imagen (píxel) se convierte en un valor eléctrico analógico (voltaje) y, por lo tanto, los cambios de valores entre píxeles se convierten en cambios de voltaje. Los estándares de transmisión requieren que el muestreo se realice en un tiempo fijo (descrito a continuación), por lo que se requieren más píxeles por línea para más cambios de voltaje por unidad de tiempo, es decir, una frecuencia más alta. Dado que estas señales suelen estar limitadas por la banda mediante cables, amplificadores, grabadoras, transmisores y receptores, la limitación de banda en la señal analógica actúa como un filtro de paso bajo eficaz en la resolución espacial. La diferencia en las resoluciones entre VHS (240 líneas discernibles por línea de exploración), Betamax (280 líneas) y el nuevo formato ED Beta (500 líneas) se explica principalmente por la diferencia en el ancho de banda de grabación.
En el estándar de transmisión NTSC , cada campo contiene 262,5 líneas y se transmiten 59,94 campos cada segundo. Por lo tanto, cada línea debe tardar 63 microsegundos, de los cuales 10,7 son para restablecer la línea siguiente. Por lo tanto, la tasa de retroceso es de 15,734 kHz. Para que la imagen parezca tener aproximadamente la misma resolución horizontal y vertical (consulte el factor Kell ), debe poder mostrar 228 ciclos por línea, lo que requiere un ancho de banda de 4,28 MHz. Si se conoce el ancho de la línea (del sensor), se puede convertir directamente en ciclos por milímetro, la unidad de resolución espacial.
Las señales del sistema de televisión B/G/I/K (generalmente utilizadas con codificación de color PAL ) transmiten cuadros con menor frecuencia (50 Hz), pero el cuadro contiene más líneas y es más ancho, por lo que los requisitos de ancho de banda son similares.
Tenga en cuenta que una "línea discernible" forma la mitad de un ciclo (un ciclo requiere una línea oscura y una clara), por lo que "228 ciclos" y "456 líneas" son medidas equivalentes.
Existen dos métodos para determinar la "resolución del sistema" (en el sentido de que se omite el ojo u otro receptor final de la información óptica). El primero consiste en realizar una serie de convoluciones bidimensionales , primero con la imagen y la lente, y luego, con el resultado de ese procedimiento y un sensor (y así sucesivamente con todos los componentes del sistema). Esto no sólo es costoso desde el punto de vista computacional, sino que normalmente también requiere la repetición del proceso para cada objeto adicional que se va a fotografiar.
El otro método consiste en transformar cada uno de los componentes del sistema en el dominio de frecuencia espacial y luego multiplicar los resultados en 2D. Se puede determinar una respuesta del sistema sin hacer referencia a un objeto. Aunque este método es considerablemente más difícil de comprender conceptualmente, resulta más fácil de utilizar computacionalmente, especialmente cuando se deben probar diferentes iteraciones de diseño u objetos en imágenes.
La transformación a utilizar es la transformada de Fourier.
El ojo humano es una característica limitante de muchos sistemas, cuando el objetivo del sistema es presentar datos a los humanos para su procesamiento.
Por ejemplo, en una función de seguridad o de control del tráfico aéreo, la pantalla y el puesto de trabajo deben construirse de modo que un ser humano medio pueda detectar problemas y dirigir medidas correctivas. Otros ejemplos son cuando un ser humano utiliza los ojos para llevar a cabo una tarea crítica, como volar (pilotar por referencia visual), conducir un vehículo, etc.
La mejor agudeza visual del ojo humano en su centro óptico (la fóvea) es inferior a 1 minuto de arco por par de líneas y se reduce rápidamente a medida que se aleja de la fóvea.
El cerebro humano necesita más que un par de líneas para comprender lo que el ojo está captando. Los criterios de Johnson definen la cantidad de pares de líneas de resolución ocular, o resolución del sensor, necesarios para reconocer o identificar un elemento.
Los sistemas que observan trayectorias atmosféricas largas pueden verse limitados por la turbulencia . Una medida clave de la calidad de la turbulencia atmosférica es el diámetro de visión , también conocido como diámetro de visión de Fried . Una trayectoria que es coherente temporalmente se conoce como parche isoplanático .
Las aperturas grandes pueden sufrir un problema de promedio de apertura , que es el resultado de la integración de varias rutas en una imagen.
La turbulencia aumenta con la longitud de onda aproximadamente a una potencia de 6/5. Por lo tanto, la visión es mejor en longitudes de onda infrarrojas que en longitudes de onda visibles.
Las exposiciones cortas sufren menos turbulencia que las exposiciones más largas debido a la turbulencia de escala "interna" y "externa"; se considera que una turbulencia corta es mucho menor que 10 ms para imágenes visibles (normalmente, cualquier valor inferior a 2 ms). La turbulencia de escala interna surge debido a los remolinos en el flujo turbulento, mientras que la turbulencia de escala externa surge del flujo de grandes masas de aire. Estas masas normalmente se mueven lentamente y, por lo tanto, se reducen al disminuir el período de integración.
Se dice que un sistema limitado únicamente por la calidad de la óptica está limitado por difracción . Sin embargo, dado que la turbulencia atmosférica es normalmente el factor limitante para los sistemas visibles que miran a través de trayectorias atmosféricas largas, la mayoría de los sistemas están limitados por la turbulencia. Se pueden realizar correcciones mediante óptica adaptativa o técnicas de posprocesamiento.
dónde
Hay una variedad de sistemas de medición disponibles y su uso puede depender del sistema que se esté probando.
Los gráficos de prueba típicos para la función de transferencia de contraste (CTF) consisten en patrones de barras repetidas (ver Discusión a continuación). La resolución límite se mide determinando el grupo más pequeño de barras, tanto verticales como horizontales, para el cual se puede ver la cantidad correcta de barras. Sin embargo, al calcular el contraste entre las áreas negras y blancas en varias frecuencias diferentes, se pueden determinar puntos de la CTF con la ecuación de contraste. donde
Cuando el sistema ya no puede resolver las barras, las áreas blancas y negras tienen el mismo valor, por lo que Contraste = 0. En frecuencias espaciales muy bajas, C máx = 1 y C mín = 0, por lo que Modulación = 1. Se puede observar cierta modulación por encima de la resolución límite; estas pueden presentar alias y fase invertida.
Al utilizar otros métodos, incluidos el interferograma, la sinusoide y el borde en el objetivo ISO 12233, es posible calcular la curva MTF completa. La respuesta al borde es similar a una respuesta escalonada y la transformada de Fourier de la primera diferencia de la respuesta escalonada produce la MTF.
Un interferograma creado entre dos fuentes de luz coherentes puede utilizarse al menos para dos fines relacionados con la resolución. El primero es determinar la calidad de un sistema de lentes (véase LUPI) y el segundo es proyectar un patrón sobre un sensor (especialmente una película fotográfica) para medir la resolución.
Esta tabla de prueba con resolución de 5 barras se utiliza a menudo para evaluar sistemas de microfilm y escáneres. Es conveniente para un rango de 1:1 (que normalmente cubre de 1 a 18 ciclos/mm) y está marcada directamente en ciclos/mm. Se pueden encontrar detalles en la norma ISO-3334.
El objetivo de prueba de resolución de la USAF de 1951 consta de un patrón de 3 objetivos de barra. A menudo se encuentran cubriendo un rango de 0,25 a 228 ciclos/mm. Cada grupo consta de seis elementos. El grupo se designa mediante un número de grupo (-2, -1, 0, 1, 2, etc.) que es la potencia a la que se debe elevar 2 para obtener la frecuencia espacial del primer elemento (por ejemplo, el grupo -2 es 0,25 pares de líneas por milímetro). Cada elemento es la sexta raíz de 2 más pequeña que el elemento anterior en el grupo (por ejemplo, el elemento 1 es 2^0, el elemento 2 es 2^(-1/6), el elemento 3 es 2(-1/3), etc.). Al leer el grupo y el número de elemento del primer elemento que no se puede resolver, se puede determinar la resolución límite mediante inspección. El complejo sistema de numeración y el uso de un cuadro de consulta se pueden evitar mediante el uso de un cuadro de diseño mejorado pero no estandarizado, que etiqueta las barras y los espacios directamente en ciclos/mm utilizando la fuente extendida OCR-A .
El objetivo NBS 1952 es un patrón de 3 barras (barras largas). La frecuencia espacial está impresa junto a cada conjunto de barras triples, por lo que la resolución límite se puede determinar mediante inspección. Esta frecuencia normalmente solo se marca después de que se haya reducido el tamaño del gráfico (normalmente 25 veces). La aplicación original requería colocar el gráfico a una distancia 26 veces la longitud focal de la lente de imagen utilizada. Las barras de arriba y de la izquierda están en secuencia, separadas aproximadamente por la raíz cuadrada de dos (12, 17, 24, etc.), mientras que las barras de abajo y de la izquierda tienen la misma separación pero un punto de inicio diferente (14, 20, 28, etc.)
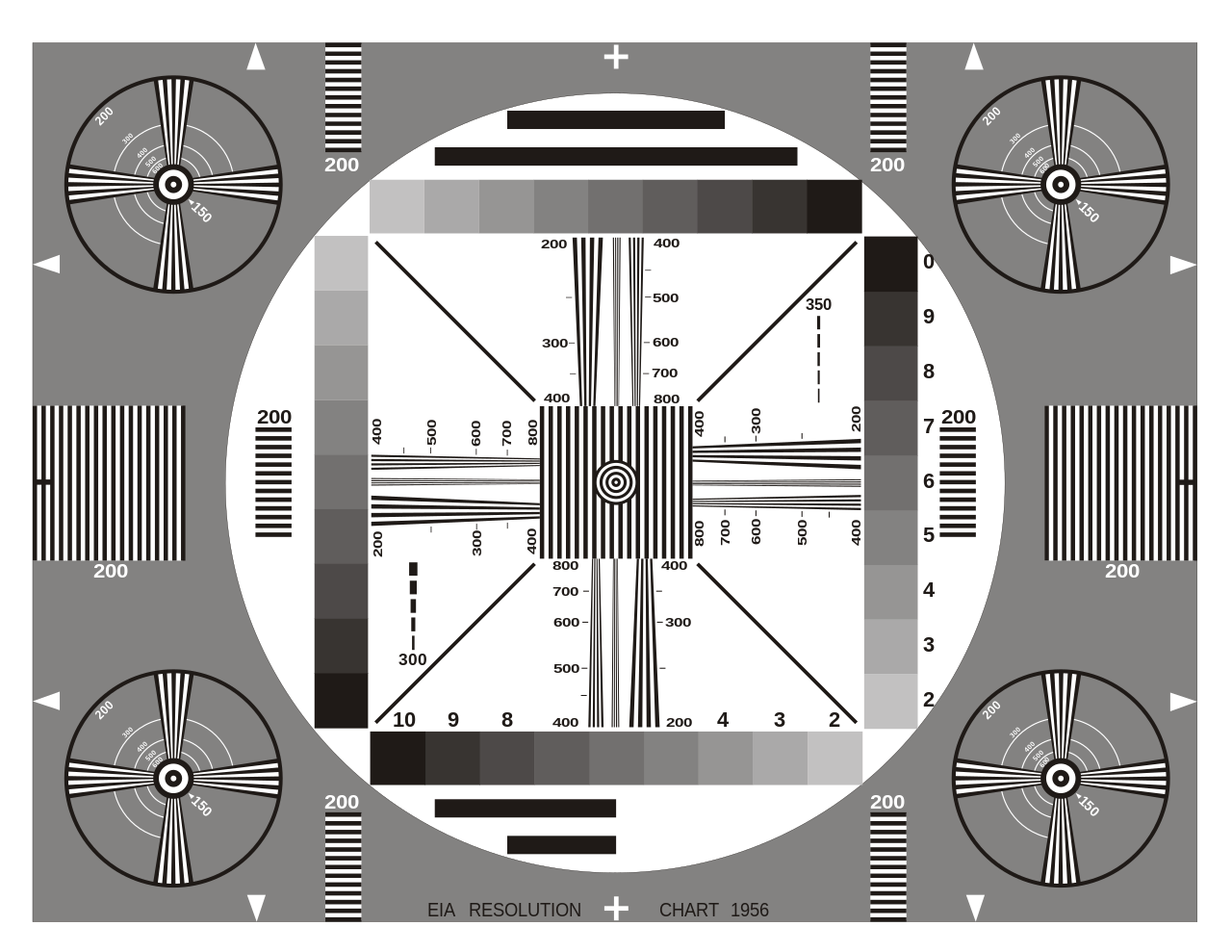
La tabla de resolución EIA 1956 fue diseñada específicamente para usarse con sistemas de televisión. Las líneas que se expanden gradualmente cerca del centro están marcadas con indicaciones periódicas de la frecuencia espacial correspondiente. La resolución límite se puede determinar mediante inspección. La medida más importante es la resolución horizontal límite, ya que la resolución vertical generalmente está determinada por el estándar de video aplicable (I/B/G/K/NTSC/NTSC-J).
El objetivo de resolución IEEE 208-1995 es similar al objetivo EIA. La resolución se mide en líneas de TV horizontales y verticales.
El objetivo ISO 12233 se desarrolló para aplicaciones de cámaras digitales, ya que la resolución espacial de las cámaras digitales modernas puede superar las limitaciones de los objetivos más antiguos. Incluye varios objetivos de borde afilado con el fin de calcular la MTF mediante la transformada de Fourier . Están desplazados de la vertical por 5 grados para que los bordes se muestreen en muchas fases diferentes, lo que permite la estimación de la respuesta de frecuencia espacial más allá de la frecuencia de Nyquist del muestreo.
La idea es análoga al uso de un patrón de ruido blanco en acústica para determinar la respuesta de frecuencia del sistema.
El interferograma utilizado para medir la resolución de la película se puede sintetizar en computadoras personales y utilizarse para generar un patrón para medir la resolución óptica. Véase especialmente las curvas MTF de Kodak.
Una señal multiráfaga es una forma de onda electrónica que se utiliza para probar sistemas analógicos de transmisión, grabación y visualización. El patrón de prueba consta de varios períodos cortos de frecuencias específicas. El contraste de cada uno de ellos se puede medir mediante inspección y registrar, lo que da como resultado un gráfico de atenuación en función de la frecuencia. El patrón multiráfaga NTSC3.58 consta de bloques de 500 kHz, 1 MHz, 2 MHz, 3 MHz y 3,58 MHz. 3,58 MHz es importante porque es la frecuencia de crominancia para el vídeo NTSC.
Utilizando una barra como objetivo, la medida resultante es la función de transferencia de contraste (CTF) y no la MTF. La diferencia surge de los subarmónicos de las ondas cuadradas y se puede calcular fácilmente.


















![{\displaystyle \mathbf {S} (x,y)=\left[\operatorname {comb} \left({\frac {x}{c}},{\frac {y}{d}}\right)*\operatorname {rect} \left({\frac {x}{a}},{\frac {y}{b}}\right)\right]\cdot \operatorname {rect} \left({\frac {x}{M\cdot c}},{\frac {y}{N\cdot d}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/760dfdb0138dd487deb7018dfd2707edb138e236)
![{\displaystyle {\begin{aligned}\mathbf {MTF_{sensor}} (\xi ,\eta )&={\mathcal {FF}}(\mathbf {S} (x,y))\\&=[\operatorname {sinc} ((M\cdot c)\cdot \xi ,(N\cdot d)\cdot \eta )*\operatorname {comb} (c\cdot \xi ,d\cdot \eta )]\cdot \operatorname {sinc} (a\cdot \xi ,b\cdot \eta )\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3fdd95d9f6c1d0711a4ad72696e40f62027513a)


![{\displaystyle \operatorname {MTF} _{s}(\nu )=e^{-3.44\cdot (\lambda f\nu /r_{0})^{5/3}\cdot [1-b\cdot (\lambda f\nu /D)^{1/3}]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4bbbd954db0b5e3114da7cd2b46f242774364115)





