Los filtros electrónicos son un tipo de filtro de procesamiento de señales en forma de circuitos eléctricos. En este artículo se tratan aquellos filtros que consisten en componentes electrónicos agrupados , a diferencia de los filtros de elementos distribuidos . Es decir, que utilizan componentes e interconexiones que, en el análisis, se puede considerar que existen en un único punto. Estos componentes pueden estar en paquetes discretos o formar parte de un circuito integrado .
Los filtros electrónicos eliminan los componentes de frecuencia no deseados de la señal aplicada, mejoran los deseados o ambas cosas. Pueden ser:
Los tipos más comunes de filtros electrónicos son los filtros lineales , independientemente de otros aspectos de su diseño. Consulte el artículo sobre filtros lineales para obtener más detalles sobre su diseño y análisis.
Las formas más antiguas de filtros electrónicos son filtros lineales analógicos pasivos, construidos utilizando solo resistencias y condensadores o resistencias e inductores . Estos se conocen como filtros unipolares RC y RL respectivamente. Sin embargo, estos filtros simples tienen usos muy limitados. Los filtros LC multipolares proporcionan un mayor control de la forma de respuesta, el ancho de banda y las bandas de transición . El primero de estos filtros fue el filtro k constante , inventado por George Campbell en 1910. El filtro de Campbell era una red en escalera basada en la teoría de líneas de transmisión . Junto con los filtros mejorados de Otto Zobel y otros, estos filtros se conocen como filtros de parámetros de imagen . Un gran paso adelante lo dio Wilhelm Cauer , quien fundó el campo de la síntesis de redes en la época de la Segunda Guerra Mundial . La teoría de Cauer permitió construir filtros que seguían con precisión alguna función de frecuencia prescrita.
Las implementaciones pasivas de filtros lineales se basan en combinaciones de resistencias (R), inductores (L) y condensadores (C). Estos tipos se conocen colectivamente como filtros pasivos , porque no dependen de una fuente de alimentación externa y no contienen componentes activos como transistores .
Los inductores bloquean las señales de alta frecuencia y conducen las señales de baja frecuencia, mientras que los condensadores hacen lo contrario. Un filtro en el que la señal pasa a través de un inductor , o en el que un condensador proporciona un camino a tierra, presenta menos atenuación a las señales de baja frecuencia que a las señales de alta frecuencia y, por lo tanto, es un filtro de paso bajo . Si la señal pasa a través de un condensador, o tiene un camino a tierra a través de un inductor, entonces el filtro presenta menos atenuación a las señales de alta frecuencia que a las señales de baja frecuencia y, por lo tanto, es un filtro de paso alto . Las resistencias por sí solas no tienen propiedades selectivas de frecuencia, pero se agregan a los inductores y condensadores para determinar las constantes de tiempo del circuito y, por lo tanto, las frecuencias a las que responde.
Los inductores y los condensadores son los elementos reactivos del filtro. La cantidad de elementos determina el orden del filtro. En este contexto, un circuito sintonizado LC que se utiliza en un filtro de paso de banda o de supresión de banda se considera un solo elemento aunque consta de dos componentes.
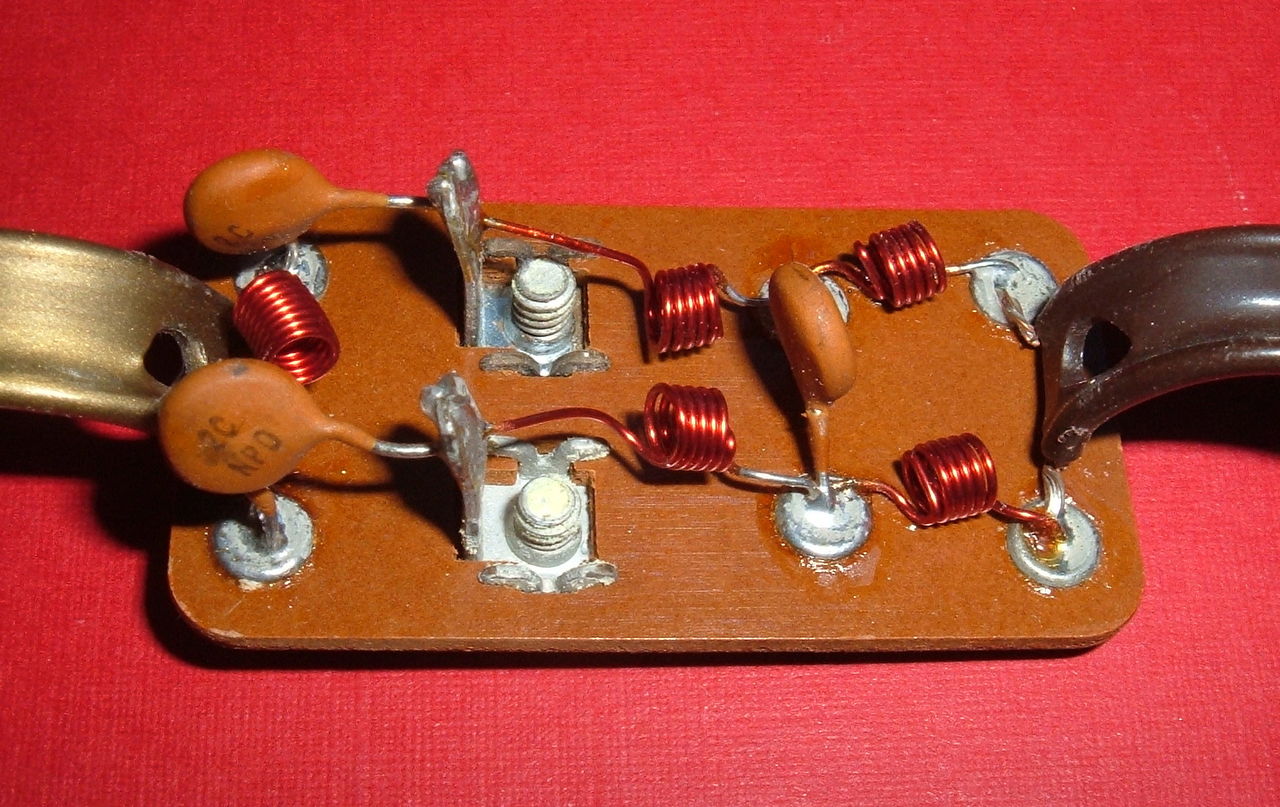
A frecuencias altas (por encima de los 100 megahercios ), a veces los inductores están formados por bucles individuales o tiras de chapa metálica, y los condensadores están formados por tiras de metal adyacentes. Estas piezas de metal inductivas o capacitivas se denominan stubs .

Los filtros pasivos más simples, los filtros RC y RL , incluyen solo un elemento reactivo, a excepción del filtro LC híbrido , que se caracteriza por tener inductancia y capacitancia integradas en un solo elemento. [1]
Un filtro L consta de dos elementos reactivos, uno en serie y otro en paralelo.


Los filtros de tres elementos pueden tener una topología 'T' o 'π' y en cualquiera de las geometrías, es posible una característica de paso bajo , paso alto , paso banda o eliminación de banda . Los componentes pueden elegirse simétricos o no, dependiendo de las características de frecuencia requeridas. El filtro T de paso alto en la ilustración tiene una impedancia muy baja en frecuencias altas y una impedancia muy alta en frecuencias bajas. Eso significa que puede insertarse en una línea de transmisión, lo que da como resultado que las frecuencias altas pasen y las frecuencias bajas se reflejen. Del mismo modo, para el filtro π de paso bajo ilustrado, el circuito puede conectarse a una línea de transmisión, transmitiendo frecuencias bajas y reflejando frecuencias altas. Usando secciones de filtro derivadas de m con impedancias de terminación correctas, la impedancia de entrada puede ser razonablemente constante en la banda de paso. [2]
Los filtros de múltiples elementos se construyen generalmente como una red en escalera . Estos pueden considerarse como una continuación de los diseños de filtros L, T y π. Se necesitan más elementos cuando se desea mejorar algún parámetro del filtro, como el rechazo de banda de rechazo o la pendiente de transición de banda de paso a banda de rechazo.
Los filtros activos se implementan mediante una combinación de componentes pasivos y activos (amplificadores) y requieren una fuente de alimentación externa. Los amplificadores operacionales se utilizan con frecuencia en diseños de filtros activos. Estos pueden tener un factor Q alto y pueden lograr resonancia sin el uso de inductores. Sin embargo, su límite de frecuencia superior está limitado por el ancho de banda de los amplificadores.
Existen muchas tecnologías de filtrado distintas a la electrónica de componentes concentrados. Entre ellas se incluyen filtros digitales , filtros de cristal , filtros mecánicos , filtros de ondas acústicas de superficie (SAW), filtros basados en resonadores acústicos de película fina (TFBAR, FBAR), filtros de granate y filtros atómicos (utilizados en relojes atómicos ).
La función de transferencia de un filtro es la relación entre la señal de salida y la señal de entrada en función de la frecuencia compleja :
La función de transferencia de todos los filtros lineales invariantes en el tiempo, cuando se construyen con componentes concentrados (en oposición a componentes distribuidos como las líneas de transmisión), será el cociente de dos polinomios en , es decir, una función racional de . El orden de la función de transferencia será la potencia más alta de encontrada en el numerador o en el denominador.
Los filtros electrónicos se pueden clasificar según la tecnología utilizada para implementarlos. Los filtros que utilizan tecnología de filtro pasivo y filtro activo se pueden clasificar además según la topología de filtro electrónico particular utilizada para implementarlos.
Cualquier función de transferencia de filtro dada puede implementarse en cualquier topología de filtro electrónico .
Algunas topologías de circuitos comunes son:
Históricamente, el diseño de filtros analógicos lineales ha evolucionado a través de tres enfoques principales. Los diseños más antiguos son circuitos simples donde el criterio de diseño principal era el factor Q del circuito. Esto reflejaba la aplicación del filtrado en receptores de radio, ya que Q era una medida de la selectividad de frecuencia de un circuito de sintonización. A partir de la década de 1920, los filtros comenzaron a diseñarse desde el punto de vista de la imagen , impulsados principalmente por los requisitos de las telecomunicaciones. Después de la Segunda Guerra Mundial, la metodología dominante fue la síntesis de redes . Las matemáticas superiores utilizadas originalmente requerían que se publicaran extensas tablas de valores de coeficientes polinómicos, pero los recursos informáticos modernos han hecho que eso sea innecesario. [3]
Los filtros de orden bajo se pueden diseñar aplicando directamente leyes básicas de circuitos como las leyes de Kirchhoff para obtener la función de transferencia. Este tipo de análisis normalmente se lleva a cabo solo para filtros simples de primer o segundo orden.

Este enfoque analiza las secciones del filtro desde el punto de vista de que el filtro se encuentra en una cadena infinita de secciones idénticas. Tiene las ventajas de la simplicidad del enfoque y la capacidad de extenderse fácilmente a órdenes superiores. Tiene la desventaja de que la precisión de las respuestas predichas depende de las terminaciones del filtro en la impedancia de la imagen, lo que normalmente no es el caso. [4]




El método de síntesis de redes comienza con una función de transferencia requerida y luego la expresa como una ecuación polinómica de la impedancia de entrada del filtro. Los valores de los elementos reales del filtro se obtienen mediante expansiones de fracciones continuas o fracciones parciales de este polinomio. A diferencia del método de imágenes, no hay necesidad de redes de adaptación de impedancia en las terminaciones, ya que los efectos de las resistencias de terminación se incluyen en el análisis desde el principio. [4]
Aquí se muestra una imagen que compara los filtros Butterworth, Chebyshev y elípticos. Los filtros de esta ilustración son todos filtros de paso bajo de quinto orden. La implementación particular (analógica o digital, pasiva o activa) no hace ninguna diferencia; su salida sería la misma.

Como se ve claramente en la imagen, los filtros elípticos son más nítidos que todos los demás, pero muestran ondulaciones en todo el ancho de banda.
{{cite book}}: CS1 maint: multiple names: authors list (link)Catálogo de tipos de filtros pasivos y valores de componentes. La Biblia para el diseño práctico de filtros electrónicos.




