Reconocimiento de gestos
[1] El reconocimiento de gestos puede ser visto como una manera para que las computadoras empiecen a entender el lenguaje corporal humano, construyendo así una relación más sólida entre máquinas y seres humanos.
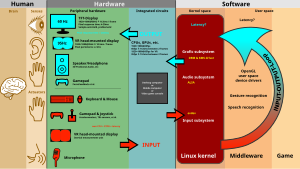
El reconocimiento de gestos permite a seres humanos comunicarse con la máquina (HMI) e interactuar naturalmente sin dispositivos mecánicos.
Esto podría hacer que los dispositivos convencionales de entrada, tales como ratón, teclados e incluso pantallas táctiles sean redundantes.
La siguiente literatura incluye trabajos en curso en el campo de la visión artificial en la captura de gestos o acciones más humanas en general y movimientos por cámaras conectadas a un ordenador.
[2][3][4][5] Esta tecnología no sólo va a reducir el impacto del hardware en el sistema, también aumentará el rango de usos aplicables desde un objeto en el mundo físico a un objeto en el mundo digital, como teclados, mouses, etc.
[13][14][15] Los dispositivos, tales como la varita mágica de LG Electronics, el lazo y la primicia utilizar Hillcrest Laboratories ' tecnología Freespace, que utilizan acelerómetros MEMS, giroscopios y otros sensores para traducir los gestos en el movimiento del cursor.
[16][17][18] Los sensores inteligentes de estos cubos emisores de luz se pueden utilizar para detectar manos y dedos, así como otros objetos cercanos, y se pueden utilizar para procesar los datos.
Por ejemplo, en lengua de signos cada gesto representa una palabra o frase.
Por otro lado, los sistemas basados en apariencia utilizan imágenes o vídeos para la interpretación directa.
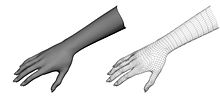
Los modelos se crean generalmente con superficies 3D complicadas, como NURBS o mallas poligonales.
Por el momento, un enfoque más interesante sería asignar objetos primitivos simples a más importantes partes del cuerpo de la persona (por ejemplo, cilindros de los brazos y el cuello, esfera para la cabeza) y analizar la forma en que éstos interactúan entre sí.
Además, algunas estructuras abstractas como super-cuádricas y cilindros generalizados pueden ser aún más conveniente para la aproximación de las partes del cuerpo.
Lo emocionante de este enfoque es que los parámetros para estos objetos son muy simples.
La versión esquelética (a la derecha) está modelando efectivamente la mano (izquierda).
Los antecedentes o rasgos distintivos de los usuarios pueden hacer más difícil el reconocimiento.
Además, la distancia desde la cámara, la resolución y la calidad de la misma también causan variaciones en la precisión del reconocimiento.
[31][32] Con el fin de medir la fatiga del brazo y el efecto secundario brazo gorila, los investigadores desarrollaron una técnica llamada Consumer Endurance (Persistencia del consumidor).