Lunokhod 1 ( ruso: Луноход-1 "Moonwalker 1"), también conocido como Аппарат 8ЕЛ № 203 ("Dispositivo 8EL No. 203") fue el primer rover robótico en la Luna y el primero en moverse libremente a través de la superficie de un astronómico. objeto más allá de la Tierra. [1] Enviado por la Unión Soviética, formó parte del programa de rovers robóticos Lunokhod . La nave espacial Luna 17 llevó el Lunokhod 1 a la Luna en 1970. Lunokhod 0 (No.201) , el anterior y primer intento de aterrizar un rover, se lanzó en febrero de 1969 pero no logró alcanzar la órbita terrestre.
Aunque sólo fue diseñado para una vida útil de tres días lunares (aproximadamente tres meses terrestres), Lunokhod 1 operó en la superficie lunar durante once días lunares (321 días terrestres) y recorrió una distancia total de 10,54 km. [2]
Lunokhod 1 era un vehículo lunar formado por un compartimento en forma de bañera con una gran tapa convexa sobre ocho ruedas motrices independientes. El rover medía 135 centímetros (4 pies y 5 pulgadas) de alto y tenía una masa de 840 kg (1.850 libras). Medía unos 170 centímetros (5 pies y 7 pulgadas) de largo y 160 centímetros (5 pies y 3 pulgadas) de ancho.
Lunokhod 1 estaba equipado con una antena en forma de cono , una antena helicoidal altamente direccional , cuatro cámaras de televisión y dispositivos extensibles especiales para probar la densidad del suelo y las propiedades mecánicas del suelo lunar .
También se incluyeron un espectrómetro de rayos X , un telescopio de rayos X , detectores de rayos cósmicos y un retrorreflector láser (suministrado por Francia [3] ).
El vehículo funcionaba con baterías que se recargaban durante el día lunar mediante un conjunto de células solares montadas en la parte inferior de la tapa. Para poder trabajar en vacío, se utilizó un lubricante especial a base de fluoruro para las piezas mecánicas y los motores eléctricos (uno en cada cubo de rueda) se encerraron en recipientes presurizados. [4] [5]
Durante las noches lunares, la tapa estaba cerrada y una unidad calentadora de radioisótopos de polonio-210 mantenía los componentes internos a la temperatura de funcionamiento .
Lunokhod 1 estaba destinado a funcionar durante tres días lunares (aproximadamente tres meses terrestres), pero en realidad funcionó durante once días lunares.
Luna 17 se lanzó el 10 de noviembre de 1970 a las 14:44:01 UTC. Después de alcanzar la órbita de estacionamiento terrestre, la etapa final del cohete de lanzamiento de Luna 17 se disparó para colocarlo en una trayectoria hacia la Luna (1970-11-10 a las 14:54 UTC). Después de dos maniobras de corrección de rumbo (los días 12 y 14 de noviembre), entró en órbita lunar el 15 de noviembre de 1970 a las 22:00 UTC.

La nave espacial aterrizó suavemente en la Luna en el Mare Imbrium ( Mar de Lluvias ) el 17 de noviembre a las 03:47 UTC. Aterrizó en el oeste de Mare Imbrium, a unos 60 km al sur del Promontorium Heraclides . El módulo de aterrizaje tenía rampas dobles desde las cuales la carga útil, Lunokhod 1 , podía descender a la superficie lunar .
A las 06:28 UTC el rover avanzó hacia la superficie de la Luna. El rover funcionaría durante el día lunar, deteniéndose ocasionalmente para recargar sus baterías a través de los paneles solares. Por la noche, el rover hibernó hasta el siguiente amanecer, calentado por la fuente radiactiva.
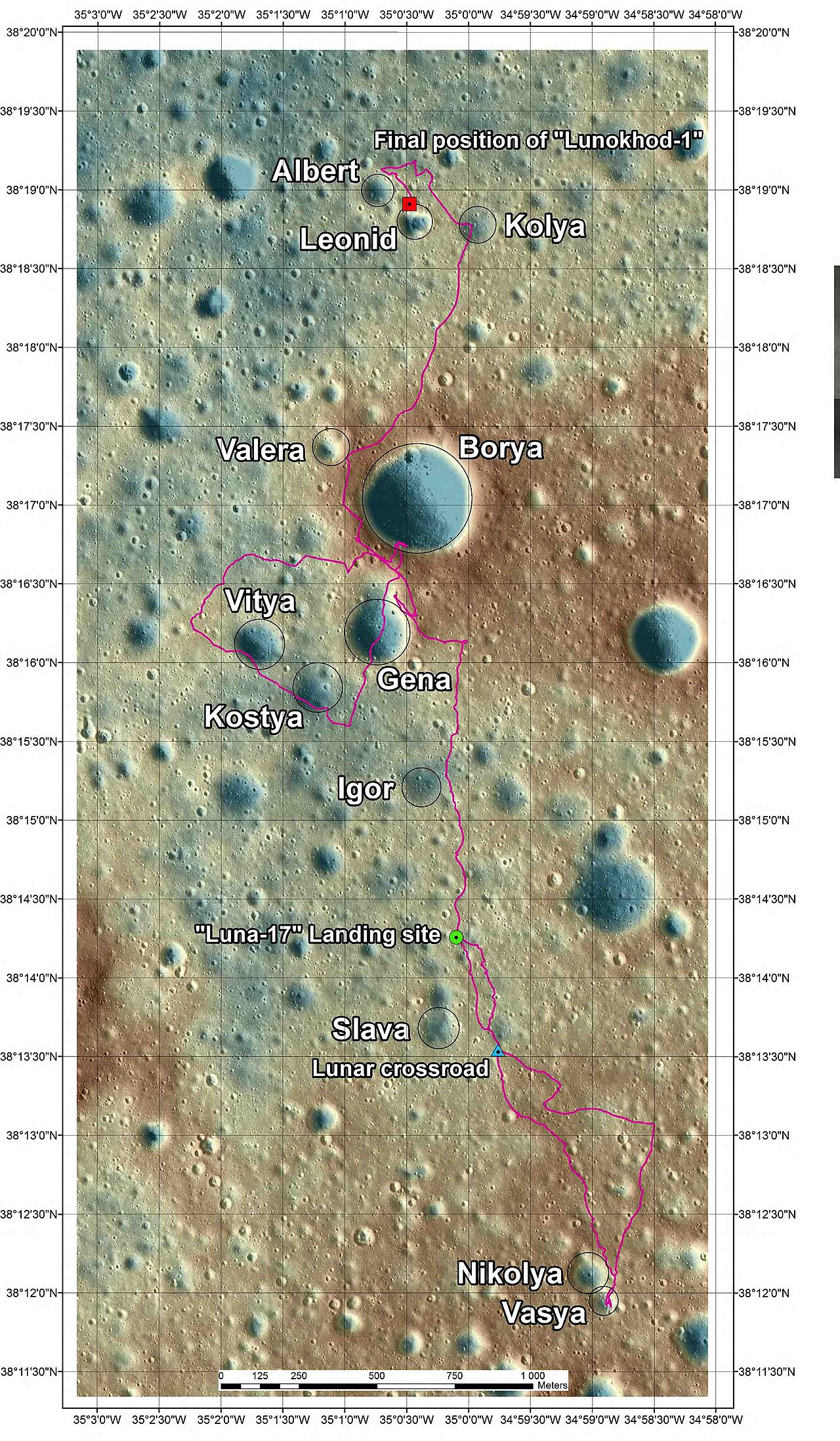
Los pequeños cráteres a lo largo de su recorrido fueron nombrados extraoficialmente durante la misión. Los nombres fueron aprobados oficialmente por la IAU en 2012. [6] Se llaman Albert , Leonid , Kolya , Valera , Borya , Gena , Vitya , Kostya , Igor , Slava , Nikolya y Vasya .
Operaciones durante 1970:
Operaciones durante 1971:



La ubicación final de Lunokhod 1 fue incierta hasta 2010, ya que los experimentos de alcance con láser lunar no habían logrado detectar una señal de retorno desde 1971. El 17 de marzo de 2010, Albert Abdrakhimov encontró tanto el módulo de aterrizaje como el rover [7] en Lunar Reconnaissance Orbiter. imagen M114185541RC (Línea 21977, Muestra 3189). [8] En abril de 2010, el equipo de Operación de alcance láser lunar del Observatorio Apache Point (APOLLO) de la Universidad de California en San Diego utilizó las imágenes del LRO para localizar el rover lo suficientemente cerca como para realizar mediciones de alcance (distancia) del láser. El 22 de abril de 2010 y los días siguientes, el equipo midió con éxito la distancia varias veces. La intersección de las esferas descritas por las distancias medidas indica la ubicación actual de Lunokhod 1 con una precisión de 1 metro. [9] [10] APOLLO está utilizando ahora el reflector de Lunokhod 1 para experimentos, ya que descubrieron, para su sorpresa, que devolvía mucha más luz que otros reflectores de la Luna. Según un comunicado de prensa de la NASA, el investigador de APOLLO, Tom Murphy, dijo: "Obtuvimos alrededor de 2.000 fotones de Lunokhod 1 en nuestro primer intento. Después de casi 40 años de silencio, este rover todavía tiene mucho que decir". [11]
En noviembre de 2010, se había determinado la ubicación del rover con un margen de error de aproximadamente un centímetro. La ubicación cerca del borde de la Luna , combinada con la capacidad de desplazar el rover incluso cuando está a la luz del sol, promete ser particularmente útil para determinar aspectos del sistema Tierra-Luna. [12]
En un informe publicado en mayo de 2013, los científicos franceses del Observatorio de la Costa Azul dirigidos por Jean-Marie Torre informaron que habían replicado los experimentos de alcance láser de 2010 realizados por científicos estadounidenses después de una investigación utilizando imágenes del Lunar Reconnaissance Orbiter de la NASA . En ambos casos, los pulsos láser fueron devueltos desde el retrorreflector Lunokhod 1 . [13]
Los controladores finalizaron la última sesión de comunicaciones con Lunokhod 1 a las 13:05 UT del 14 de septiembre de 1971. Los intentos de restablecer el contacto finalmente se interrumpieron y las operaciones de Lunokhod 1 cesaron oficialmente el 4 de octubre de 1971, aniversario del Sputnik 1 . Durante sus 322 días terrestres de operaciones, Lunokhod 1 viajó 10.540 metros (6,55 millas) y produjo más de 20.000 imágenes de televisión y 206 panoramas de alta resolución. Además, realizó 25 análisis del suelo lunar con su espectrómetro de fluorescencia de rayos X RIFMA y utilizó su penetrómetro en 500 lugares diferentes.
.jpg/1280px-FP2A3576_(23497689198).jpg)



{kind=link}