

El Sistema de Servicio Móvil ( MSS ), es un sistema robótico a bordo de la Estación Espacial Internacional (ISS). Lanzado a la ISS en 2001, desempeña un papel clave en el montaje y mantenimiento de la estación; mueve equipos y suministros alrededor de la estación, apoya a los astronautas que trabajan en el espacio y da servicio a los instrumentos y otras cargas útiles conectadas a la ISS y se utiliza para mantenimiento externo. Los astronautas reciben formación especializada que les permite realizar estas funciones con los distintos sistemas del MSS.
El MSS se compone de tres componentes:
El sistema puede moverse a lo largo de rieles en la estructura de armadura integrada encima del carro transportador móvil proporcionado en EE. UU. que alberga el sistema base MRS. El software de control del sistema fue escrito en el lenguaje de programación Ada 95 . [1]
El MSS fue diseñado y fabricado por MDA (anteriormente divisiones de MacDonald Dettwiler Associates llamadas MDA Space Missions , MD Robotics y anteriormente llamada SPAR Aerospace) para la contribución de la Agencia Espacial Canadiense a la Estación Espacial Internacional.

.jpg/1280px-Canadarm2_Latching_End_Effector_and_joints_(ISS052e000402).jpg)

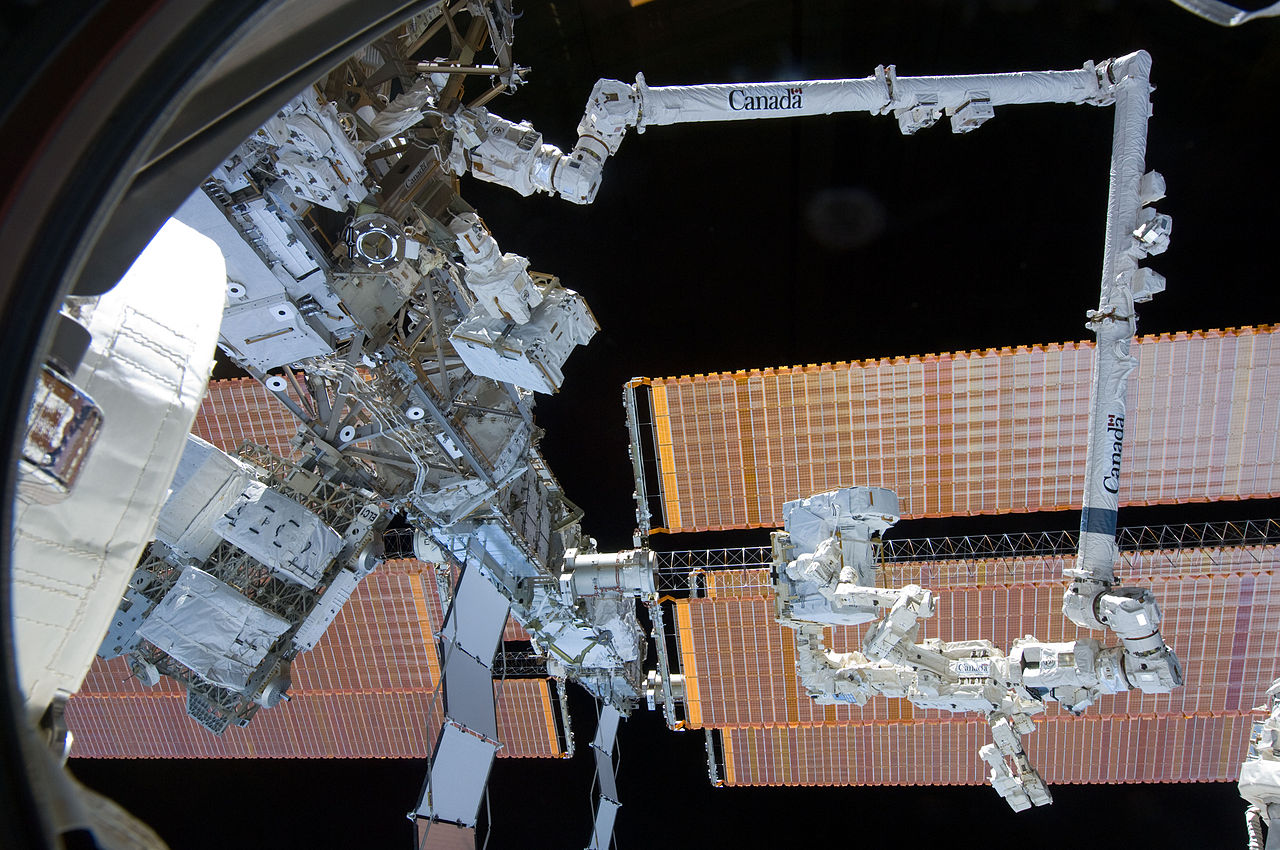

Conocido oficialmente como Sistema de manipulación remota de la estación espacial (SSRMS). Lanzado en la misión STS-100 en abril de 2001, este brazo de segunda generación es una versión más grande y avanzada del Canadarm original del transbordador espacial . Canadarm2 mide 17,6 m (58 pies) cuando está completamente extendido y tiene siete articulaciones motorizadas (una bisagra de "codo" en el medio y tres articulaciones giratorias en cada uno de los extremos de "muñeca/hombro"). Tiene una masa de 1.800 kg (4.000 lb) y un diámetro de 35 cm (14 pulgadas) y está hecho de titanio. El brazo es capaz de manejar grandes cargas útiles de hasta 116.000 kg (256.000 lb) y pudo ayudar a atracar el transbordador espacial. Es auto-reubicable y puede moverse de un extremo a otro para llegar a muchas partes de la Estación Espacial en un movimiento similar al de un gusano . En este movimiento, está limitado únicamente por la cantidad de dispositivos de agarre de datos de energía (PDGF) en la estación. Los PDGF ubicados alrededor de la estación proporcionan energía, datos y video al brazo a través de cualquiera de sus dos efectores finales de enganche (LEE). El brazo también puede recorrer toda la longitud de la estructura de la estación espacial utilizando el Sistema de Base Móvil.
Además de moverse por la estación, el brazo puede mover cualquier objeto con un gancho . En la construcción de la estación, el brazo se utilizó para colocar grandes segmentos en su lugar. También se puede utilizar para capturar naves no tripuladas como el SpaceX Dragon , la nave espacial Cygnus y el vehículo de transferencia japonés H-II (HTV), que están equipados con un dispositivo de agarre estándar que el Canadarm2 utiliza para capturar y atracar la nave espacial. El brazo también se utiliza para desatracar y liberar la nave espacial después de su uso.
Los operadores a bordo ven lo que están haciendo mirando las tres pantallas LCD de la estación de trabajo robótica (RWS). El MSS cuenta con dos unidades RWS: una en el módulo Destiny y otra en la Cúpula . Sólo un RWS controla el MSS a la vez. El RWS tiene dos juegos de palancas de control: un controlador manual rotacional (RHC) y un controlador manual traslacional (THC). Además de esto, se encuentra el panel de control y visualización (DCP) y el sistema informático portátil (PCS).
En los últimos años, la mayoría de las operaciones robóticas son comandadas remotamente por controladores de vuelo en tierra en el Centro de Control de Misión Christopher C. Kraft Jr. , o desde el Centro Espacial John H. Chapman de la Agencia Espacial Canadiense . Los operadores pueden trabajar en turnos para lograr objetivos con más flexibilidad que cuando lo hacen los operadores de la tripulación a bordo, aunque a un ritmo más lento. Los operadores de astronautas se utilizan para operaciones en las que el tiempo es crítico, como capturas de vehículos visitantes y actividades extravehiculares respaldadas por robótica .
Algún tiempo antes del 12 de mayo de 2021, Canadarm2 fue alcanzado por un pequeño trozo de escombros orbitales que dañó sus mantas térmicas y una de las barreras. [2] Su funcionamiento no pareció verse afectado. [2]
Canadarm 2 también ayudará a atracar los módulos de la estación espacial Axiom en la ISS . [3] [4]
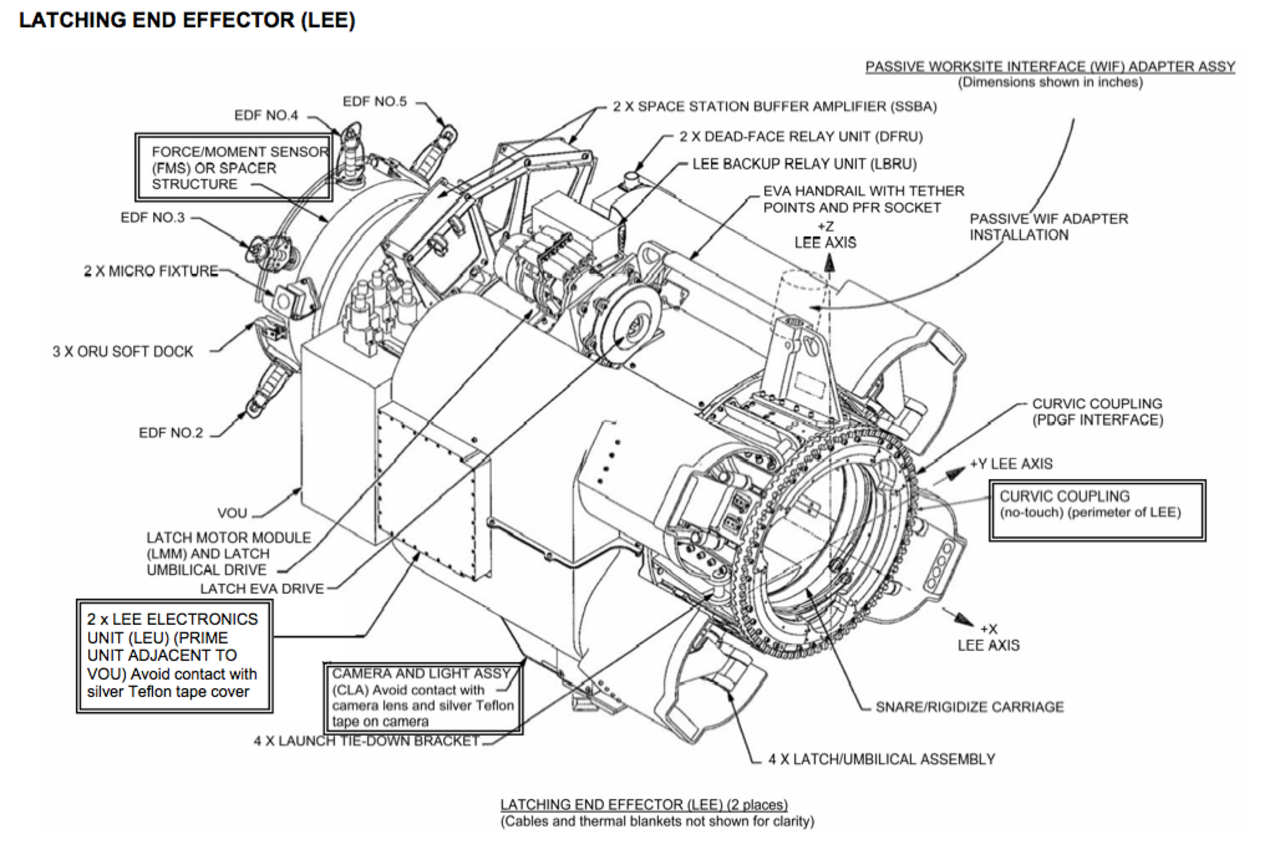

Canadarm2 tiene dos LEE, uno en cada extremo. Un LEE tiene 3 cables trampa para atrapar el eje del dispositivo de agarre . [5] Otro LEE se encuentra en la unidad de alojamiento ORU de carga útil (POA) del sistema de base móvil. El POA LEE se utiliza para albergar temporalmente grandes componentes de la ISS. Uno más es el manipulador diestro de propósito especial (SPDM, también conocido como "Dextre" o "mano de Canadá"). Se han fabricado y utilizado seis LEE en varios lugares de la ISS [ cita requerida ] .
El manipulador diestro de propósito especial, o " Dextre ", es un robot más pequeño de dos brazos que puede conectarse a Canadarm2, la ISS o el sistema de base móvil. Los brazos y sus herramientas eléctricas son capaces de realizar delicadas tareas de montaje y cambiar las Unidades de Reemplazo Orbital (ORU) que actualmente manejan los astronautas durante las caminatas espaciales. Aunque Canadarm2 puede moverse por la estación con un "movimiento de gusano", no puede transportar nada consigo a menos que Dextre esté conectado. Las pruebas se realizaron en las cámaras de simulación espacial del Laboratorio David Florida de la Agencia Espacial Canadiense en Ottawa , Ontario. El manipulador fue lanzado a la estación el 11 de marzo de 2008 en la STS-123 .


El sistema base de servicio remoto móvil (MBS) es una plataforma base para los brazos robóticos. Fue agregada a la estación durante la STS-111 en junio de 2002. La plataforma descansa sobre el Mobile Transporter [6] (instalado en STS-110 , diseñado por Northrop Grumman en Carpinteria, CA ), lo que le permite deslizarse 108 metros por rieles. en la armadura principal de la estación . [7] Canadarm2 puede reubicarse por sí solo, pero no puede transportar al mismo tiempo, Dextre no puede reubicarse por sí solo. El MBS ofrece a los dos brazos robóticos la capacidad de viajar a los lugares de trabajo a lo largo de la estructura del truss y de bajarse de las grapas a lo largo del camino. Cuando Canadarm2 y Dextre están conectados al MBS, tienen una masa combinada de 4900 kg (10,800 lb). [8] Al igual que Canadarm2 , fue construido por MD Robotics y tiene una vida útil mínima de 15 años. [7] [9]
El MBS está equipado con cuatro dispositivos Power Data Grapple , uno en cada una de sus cuatro esquinas superiores. Cualquiera de estos puede usarse como base para los dos robots, Canadarm2 y Dextre, así como cualquiera de las cargas útiles que puedan contener. El MBS también tiene dos ubicaciones para adjuntar cargas útiles. El primero es el alojamiento de unidades de reemplazo orbital/carga útil (POA). Este es un dispositivo que se ve y funciona de manera muy similar a los efectores finales de enganche de Canadarm2. Se puede utilizar para estacionar, alimentar y comandar cualquier carga útil con un dispositivo de agarre, mientras se mantiene a Canadarm2 libre para hacer otras cosas. La otra ubicación del archivo adjunto es el Sistema de archivo adjunto común MBS (MCAS). Este es otro tipo de sistema de fijación que se utiliza para albergar experimentos científicos. [10]
El MBS también apoya a los astronautas durante sus actividades extravehiculares . Tiene ubicaciones para almacenar herramientas y equipos, reposapiés, pasamanos y puntos de sujeción de correas de seguridad, así como un conjunto de cámara. Si es necesario, un astronauta incluso puede "montar" el MBS mientras éste se mueve a una velocidad máxima de aproximadamente 1,5 metros por minuto. [6] A ambos lados del MBS se encuentran las ayudas de traducción para la tripulación y el equipo. Estos carros viajan sobre los mismos rieles que el MBS. Los astronautas los montan manualmente durante los EVA para transportar equipos y facilitar sus movimientos por la estación.
El 27 de mayo de 2011 se instaló una pluma de 15,24 metros (50 pies) con pasamanos y cámaras de inspección, unida al extremo del Canadarm2.
La estación recibió un segundo brazo robótico durante la misión STS-124 , el sistema de manipulación remota del módulo experimental japonés (JEM-RMS). El JEM-RMS se utiliza principalmente para dar servicio a la instalación expuesta JEM . El 15 de julio de 2021 se lanzó un brazo robótico adicional, el Brazo Robótico Europeo (ERA), junto con el Módulo de Laboratorio Multipropósito construido en Rusia .
Originalmente conectada a Pirs, la ISS también tiene dos grúas de carga Strela . Una de las grúas podría extenderse hasta llegar al final de Zarya . El otro podría extenderse al lado contrario y llegar al final del Zvezda . La primera grúa se montó en el espacio durante las misiones STS-96 y STS-101 . La segunda grúa se lanzó junto al propio Pirs. Posteriormente las grúas fueron trasladadas al compartimento de atraque del módulo Poisk y Zarya .


{kind=link}