La teoría de control clásica es una rama de la teoría de control que trata del comportamiento de sistemas dinámicos con entradas, y cómo su comportamiento es modificado por la retroalimentación , utilizando la transformada de Laplace como herramienta básica para modelar dichos sistemas.
El objetivo habitual de la teoría de control es controlar un sistema, a menudo llamado planta , de modo que su salida siga una señal de control deseada, llamada referencia , que puede ser un valor fijo o cambiante. Para ello se diseña un controlador , que supervisa la salida y la compara con la referencia. La diferencia entre la salida real y la deseada, llamada señal de error , se aplica como retroalimentación a la entrada del sistema, para acercar la salida real a la referencia.
La teoría de control clásica se ocupa de sistemas lineales invariantes en el tiempo (LTI) de una sola entrada y una sola salida (SISO). [1] Se puede calcular la transformada de Laplace de la señal de entrada y salida de dichos sistemas. La función de transferencia relaciona la transformada de Laplace de la entrada y la salida.
Para superar las limitaciones del controlador de lazo abierto , la teoría de control clásica introduce la retroalimentación . Un controlador de lazo cerrado utiliza la retroalimentación para controlar estados o salidas de un sistema dinámico . Su nombre proviene de la ruta de información en el sistema: las entradas del proceso (por ejemplo, voltaje aplicado a un motor eléctrico ) tienen un efecto en las salidas del proceso (por ejemplo, velocidad o par del motor), que se mide con sensores y procesa por el controlador; el resultado (la señal de control) se "realimenta" como entrada al proceso, cerrando el lazo.
Los controladores de circuito cerrado tienen las siguientes ventajas sobre los controladores de circuito abierto :
En algunos sistemas, se utilizan simultáneamente el control de bucle cerrado y el de bucle abierto. En dichos sistemas, el control de bucle abierto se denomina " feedforward" y sirve para mejorar aún más el rendimiento del seguimiento de referencia.
Una arquitectura de controlador de circuito cerrado común es el controlador PID .
Un sistema físico se puede modelar en el " dominio del tiempo ", donde la respuesta de un sistema dado es una función de las diversas entradas, los valores anteriores del sistema y el tiempo. A medida que pasa el tiempo, el estado del sistema y su respuesta cambian. Sin embargo, los modelos de dominio del tiempo para sistemas se modelan con frecuencia utilizando ecuaciones diferenciales de alto orden que pueden llegar a ser imposibles de resolver para los humanos y algunas de las cuales pueden incluso llegar a ser imposibles de resolver de manera eficiente para los sistemas informáticos modernos.
Para contrarrestar este problema, la teoría de control clásica utiliza la transformada de Laplace para convertir una ecuación diferencial ordinaria (EDO) en el dominio del tiempo en un polinomio algebraico regular en el dominio de la frecuencia. Una vez que un sistema dado se ha convertido al dominio de la frecuencia, se puede manipular con mayor facilidad.
La teoría de control moderna , en lugar de cambiar los dominios para evitar las complejidades de las matemáticas de EDO del dominio del tiempo, convierte las ecuaciones diferenciales en un sistema de ecuaciones del dominio del tiempo de orden inferior llamadas ecuaciones de estado , que luego pueden manipularse utilizando técnicas de álgebra lineal. [2]
La teoría de control clásica utiliza la transformada de Laplace para modelar los sistemas y las señales. La transformada de Laplace es un enfoque en el dominio de la frecuencia para señales de tiempo continuo independientemente de si el sistema es estable o inestable. La transformada de Laplace de una función f ( t ) , definida para todos los números reales t ≥ 0 , es la función F ( s ) , que es una transformada unilateral definida por
donde s es un parámetro de frecuencia de número complejo
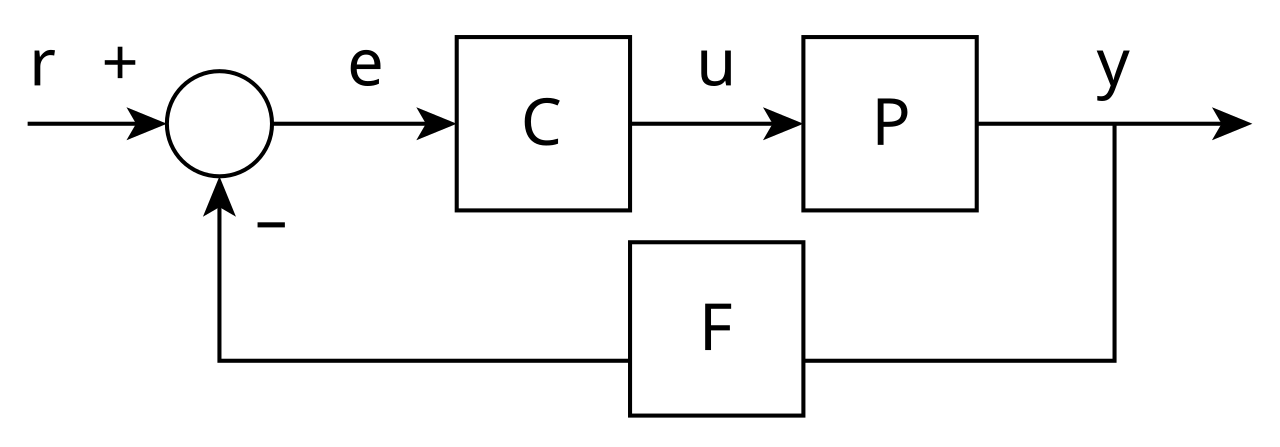
Una arquitectura de control de retroalimentación común es el bucle servo, en el que la salida del sistema y(t) se mide utilizando un sensor F y se resta del valor de referencia r(t) para formar el error servo e . El controlador C utiliza entonces el error servo e para ajustar la entrada u a la planta (sistema que se está controlando) P con el fin de impulsar la salida de la planta hacia la referencia. Esto se muestra en el diagrama de bloques a continuación. Este tipo de controlador es un controlador de bucle cerrado o controlador de retroalimentación.
Esto se denomina sistema de control de una sola entrada y una sola salida ( SISO ); los sistemas MIMO (es decir, Multi-Input-Multi-Output), con más de una entrada/salida, son comunes. En tales casos, las variables se representan mediante vectores en lugar de valores escalares simples. Para algunos sistemas de parámetros distribuidos, los vectores pueden ser de dimensión infinita (normalmente funciones).
Si asumimos que el controlador C , la planta P y el sensor F son lineales e invariantes en el tiempo (es decir, los elementos de su función de transferencia C(s) , P(s) y F(s) no dependen del tiempo), los sistemas anteriores pueden analizarse utilizando la transformada de Laplace sobre las variables. Esto da las siguientes relaciones:
Resolviendo Y ( s ) en términos de R ( s ) obtenemos
La expresión se denomina función de transferencia de bucle cerrado del sistema. El numerador es la ganancia directa (de bucle abierto) de a , y el denominador es uno más la ganancia al pasar por el bucle de retroalimentación, la llamada ganancia de bucle. Si , es decir, tiene una norma grande con cada valor de s , y si , entonces es aproximadamente igual a y la salida sigue de cerca la entrada de referencia.
El controlador PID es probablemente el diseño de control de retroalimentación más utilizado (junto con el control Bang-bang, mucho más rudimentario). PID es una sigla de Proporcional-Integral-Derivativo , que hace referencia a los tres términos que operan sobre la señal de error para producir una señal de control. Si es la señal de control enviada al sistema, es la salida medida y es la salida deseada, y el error de seguimiento , un controlador PID tiene la forma general
La dinámica de bucle cerrado deseada se obtiene ajustando los tres parámetros , y , a menudo de forma iterativa mediante "ajuste" y sin conocimientos específicos de un modelo de planta. A menudo, la estabilidad se puede asegurar utilizando solo el término proporcional. El término integral permite el rechazo de una perturbación de paso (a menudo una especificación sorprendente en el control de procesos ). El término derivativo se utiliza para proporcionar amortiguación o modelado de la respuesta. Los controladores PID son la clase de sistemas de control mejor establecida: sin embargo, no se pueden utilizar en varios casos más complicados, especialmente si se consideran sistemas de múltiples entradas y múltiples salidas (MIMO).
La aplicación de la transformación de Laplace da como resultado la ecuación del controlador PID transformada
con la función de transferencia del controlador PID
Existe un buen ejemplo del sistema de circuito cerrado que analizamos anteriormente. Si tomamos
Función de transferencia del controlador PID en forma de serie
Filtro de primer orden en bucle de retroalimentación
Actuador lineal con entrada filtrada
e inserte todo esto en la expresión para la función de transferencia de bucle cerrado , entonces el ajuste es muy fácil: simplemente ponga
y obtener de forma idéntica.
En el caso de los controladores PID prácticos, un diferenciador puro no es ni físicamente factible ni deseable [3] debido a la amplificación del ruido y los modos resonantes en el sistema. Por lo tanto, se utiliza en su lugar un enfoque de tipo compensador de adelanto de fase o un diferenciador con reducción gradual de paso bajo.
La teoría de control clásica utiliza una serie de herramientas para analizar sistemas y diseñar controladores para dichos sistemas. Las herramientas incluyen el lugar de las raíces , el criterio de estabilidad de Nyquist , el diagrama de Bode , el margen de ganancia y el margen de fase . Las herramientas más avanzadas incluyen las integrales de Bode para evaluar las limitaciones y compensaciones de rendimiento, y las funciones descriptivas para analizar las no linealidades en el dominio de la frecuencia. [4]
y es eficaz para el análisis y diseño de sistemas lineales invariantes en el tiempo con una sola entrada y una sola salida.
teoría de control moderna, basada en el análisis y síntesis del dominio del tiempo utilizando variables de estado





























