
El servocontrol es un método para controlar muchos tipos de servos RC/hobbyist enviando al servo una señal PWM ( modulación de ancho de pulso ), una serie de pulsos repetidos de ancho variable donde el ancho del pulso (servos de hobby modernos más comunes) o el ciclo de trabajo de un tren de pulsos (menos común hoy en día) determina la posición que debe alcanzar el servo. La señal PWM puede provenir de un receptor de radiocontrol al servo o de microcontroladores comunes como el Arduino .
Los pequeños servos de hobby (a menudo llamados radiocontrol o servos RC) se conectan a través de una conexión estándar de tres cables: dos cables para una fuente de alimentación de CC y uno para control, que transporta los pulsos de control.
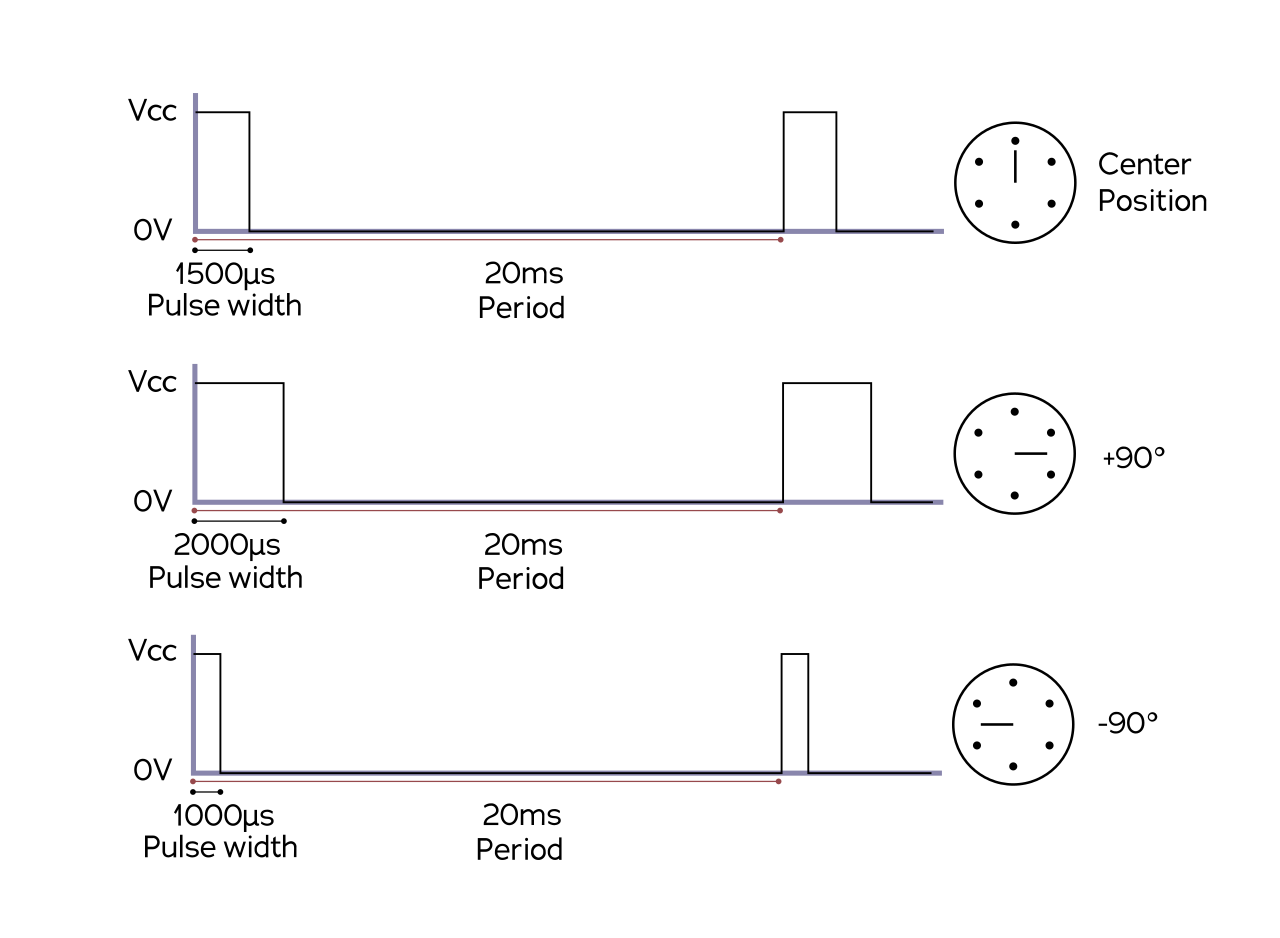
Los parámetros para los pulsos son el ancho mínimo del pulso, el ancho máximo del pulso y la tasa de repetición. Dadas las limitaciones de rotación del servo, el neutro se define como el centro de rotación. Diferentes servos tendrán diferentes restricciones en su rotación, pero la posición neutral siempre es de alrededor de 1,5 milisegundos (ms) de ancho de pulso.
En los servos RC modernos, el ángulo de rotación mecánica está determinado por el ancho de un pulso eléctrico que se aplica al cable de control. Esta es una forma de modulación por ancho de pulso . El servo RC típico espera ver un pulso cada 20 ms, sin embargo, esto puede variar dentro de un amplio rango que difiere de un servo a otro. El ancho del pulso determinará qué tan lejos gira el motor. Por ejemplo, en muchos servos RC, un pulso de 1,5 ms hará que el motor gire a la posición de 90° (posición neutral). El tiempo bajo (y el período total) puede variar en un amplio rango y variar de un pulso a otro, sin ningún efecto sobre la posición del servomotor.
La posición del servo RC moderno no está definida por el ciclo de trabajo PWM (es decir, tiempo de ENCENDIDO versus APAGADO) sino solo por el ancho del pulso. (Esto es diferente del PWM utilizado, por ejemplo, en algunos controles de velocidad de motores de CC). La mayoría de los servos RC se mueven a la misma posición cuando reciben un pulso de 1,5 ms cada 6 ms (un ciclo de trabajo del 25%) que cuando reciben un pulso de 1,5 ms cada 25 ms (un ciclo de trabajo del 6%) – en ambos casos, giran a la posición central (posición neutral). Con muchos servos RC, siempre que la frecuencia de actualización (cuántas veces por segundo se envía el pulso, también conocida como frecuencia de repetición del pulso) esté en un rango de 40 Hz a 200 Hz, el valor exacto de la frecuencia de actualización es irrelevante. [1] [2] [3] [4] [5] [6] [7] [8] [9]
El período de 20 ms (50 Hz) proviene de los días en que la señal se codificaba en formato PPM ( modulación de posición de pulso ) para ser enviada por aire. [10] El período de PPM fue de alrededor de 22,5 ms, y la conversión a PWM fue trivial: el tiempo del estado alto de PWM fue la posición temporal del pulso de PPM para ese servo.
La mayoría de los receptores RC envían pulsos al servo RC a una velocidad de cuadros constante, cambiando solo el tiempo alto. Sin embargo, es posible ordenar a un servo RC que se mueva en todo su rango con un generador de funciones configurado en un ciclo de trabajo constante del 10% cambiando solo la frecuencia (velocidad de fotogramas). [11]
Cuando a estos servos se les ordena moverse, se moverán a la posición y mantendrán esa posición. Si una fuerza externa empuja contra el servo mientras el servo mantiene una posición, el servo se resistirá a salir de esa posición. La cantidad máxima de fuerza que el servo puede ejercer es el par nominal del servo. Sin embargo, los servos sólo mantendrán su posición durante el tiempo de espera; El pulso de posición debe repetirse, generalmente dentro de 20 ms, para indicarle al servo que permanezca en su posición.
Cuando se envía un pulso a un servo que dura menos de 1,5 ms, el servo gira a una posición y mantiene su eje de salida a una cierta cantidad de grados en sentido antihorario desde el punto neutral. Cuando el pulso tiene una duración superior a 1,5 ms ocurre lo contrario. Los anchos de pulso mínimo y máximo que ordenarán al servo que gire a una posición válida son funciones de cada servo. Diferentes marcas, e incluso diferentes servos de la misma marca, tendrán máximos y mínimos diferentes. Generalmente, el pulso mínimo tendrá aproximadamente 1 ms de ancho y el pulso máximo tendrá 2 ms de ancho.