La ventaja mecánica es una medida de la amplificación de fuerza lograda al usar una herramienta, un dispositivo mecánico o un sistema de máquina. El dispositivo compensa las fuerzas de entrada con el movimiento para obtener una amplificación deseada en la fuerza de salida. El modelo para esto es la ley de la palanca . Los componentes de la máquina diseñados para gestionar las fuerzas y el movimiento de esta manera se denominan mecanismos . [1] Un mecanismo ideal transmite potencia sin agregarle ni restarle. Esto significa que la máquina ideal no incluye una fuente de energía, no tiene fricción y está construida a partir de cuerpos rígidos que no se desvían ni se desgastan. El rendimiento de un sistema real en relación con este ideal se expresa en términos de factores de eficiencia que tienen en cuenta las desviaciones del ideal.
La palanca es una barra móvil que pivota sobre un punto de apoyo unido o colocado sobre un punto fijo. La palanca funciona aplicando fuerzas a diferentes distancias del punto de apoyo o pivote. La ubicación del punto de apoyo determina la clase de una palanca . Cuando una palanca gira continuamente, funciona como una palanca rotatoria de segunda clase. El movimiento del punto final de la palanca describe una órbita fija, donde se puede intercambiar energía mecánica (véase una manivela como ejemplo).
En la actualidad, este tipo de palanca rotatoria se utiliza ampliamente; véase palanca (rotativa) de segunda clase; véase engranajes, poleas o transmisión por fricción, que se utiliza en un esquema de transmisión de potencia mecánica. Es habitual que la ventaja mecánica se manipule de forma "colapsada", mediante el uso de más de un engranaje (un conjunto de engranajes). En un conjunto de engranajes de este tipo, se utilizan engranajes que tienen radios más pequeños y menos ventaja mecánica inherente. Para hacer uso de la ventaja mecánica no colapsada, es necesario utilizar una palanca rotatoria de "longitud real". Véase también la incorporación de la ventaja mecánica en el diseño de ciertos tipos de motores eléctricos; un diseño es un "outrunner".

A medida que la palanca gira sobre el punto de apoyo, los puntos más alejados de este pivote se mueven más rápido que los puntos más cercanos al pivote. La potencia que entra y sale de la palanca es la misma, por lo que debe salir igual cuando se realizan los cálculos. La potencia es el producto de la fuerza y la velocidad, por lo que las fuerzas aplicadas a los puntos más alejados del pivote deben ser menores que las aplicadas a los puntos más cercanos. [1]
Si a y b son distancias desde el fulcro a los puntos A y B y si la fuerza F A aplicada a A es la fuerza de entrada y F B ejercida en B es la de salida, la relación de las velocidades de los puntos A y B está dada por a / b por lo que la relación entre la fuerza de salida y la fuerza de entrada, o ventaja mecánica, está dada por
Esta es la ley de la palanca , que Arquímedes formuló utilizando el razonamiento geométrico. [2] Muestra que si la distancia a desde el fulcro hasta donde se aplica la fuerza de entrada (punto A ) es mayor que la distancia b desde el fulcro hasta donde se aplica la fuerza de salida (punto B ), entonces la palanca amplifica la fuerza de entrada. Si la distancia desde el fulcro hasta la fuerza de entrada es menor que desde el fulcro hasta la fuerza de salida, entonces la palanca reduce la fuerza de entrada. A Arquímedes, quien reconoció las profundas implicaciones y aspectos prácticos de la ley de la palanca, se le ha atribuido la famosa afirmación: "Dadme un punto de apoyo y con una palanca moveré el mundo entero". [3]
El uso de la velocidad en el análisis estático de una palanca es una aplicación del principio del trabajo virtual .
El requisito de que la potencia de entrada a un mecanismo ideal sea igual a la potencia de salida proporciona una forma sencilla de calcular la ventaja mecánica a partir de la relación de velocidad de entrada-salida del sistema.
La potencia de entrada a un tren de engranajes con un par T A aplicado a la polea motriz que gira a una velocidad angular de ω A es P=T A ω A .
Debido a que el flujo de potencia es constante, el par T B y la velocidad angular ω B del engranaje de salida deben satisfacer la relación
que produce
Esto demuestra que, en un mecanismo ideal, la relación de velocidad de entrada y salida es igual a la ventaja mecánica del sistema. Esto se aplica a todos los sistemas mecánicos, desde robots hasta sistemas de acoplamiento .
Los dientes de los engranajes están diseñados de modo que la cantidad de dientes de un engranaje sea proporcional al radio de su círculo primitivo y de modo que los círculos primitivos de los engranajes engranados rueden uno sobre el otro sin deslizarse. La relación de velocidad de un par de engranajes engranados se puede calcular a partir de la relación de los radios de los círculos primitivos y la relación de la cantidad de dientes de cada engranaje, su relación de transmisión .
La velocidad v del punto de contacto en los círculos primitivos es la misma en ambos engranajes y está dada por
donde el engranaje de entrada A tiene radio r A y engrana con el engranaje de salida B de radio r B , por lo tanto,
donde N A es el número de dientes del engranaje de entrada y N B es el número de dientes del engranaje de salida.
La ventaja mecánica de un par de engranajes engranados en los que el engranaje de entrada tiene N A dientes y el engranaje de salida tiene N B dientes viene dada por
Esto demuestra que si el engranaje de salida G B tiene más dientes que el engranaje de entrada G A , entonces el tren de engranajes amplifica el par de entrada. Y, si el engranaje de salida tiene menos dientes que el engranaje de entrada, entonces el tren de engranajes reduce el par de entrada.
Si el engranaje de salida de un tren de engranajes gira más lentamente que el de entrada, entonces el tren de engranajes se denomina reductor de velocidad (multiplicador de fuerza). En este caso, debido a que el engranaje de salida debe tener más dientes que el de entrada, el reductor de velocidad amplificará el par de entrada.
Los mecanismos que consisten en dos ruedas dentadas conectadas por una cadena o dos poleas conectadas por una correa están diseñados para proporcionar una ventaja mecánica específica en los sistemas de transmisión de potencia.
La velocidad v de la cadena o correa es la misma cuando está en contacto con las dos ruedas dentadas o poleas:
donde la rueda dentada o polea de entrada A engrana con la cadena o correa a lo largo del radio de paso r A y la rueda dentada o polea de salida B engrana con esta cadena o correa a lo largo del radio de paso r B ,
por lo tanto
donde N A es el número de dientes de la rueda dentada de entrada y N B es el número de dientes de la rueda dentada de salida. Para una transmisión por correa dentada , se puede utilizar el número de dientes de la rueda dentada. Para transmisiones por correa de fricción, se debe utilizar el radio de paso de las poleas de entrada y salida.
La ventaja mecánica de un par de transmisión por cadena o transmisión por correa dentada con una rueda dentada de entrada con N A dientes y una rueda dentada de salida con N B dientes viene dada por
La ventaja mecánica de las transmisiones por correa de fricción viene dada por
Las cadenas y correas disipan potencia por fricción, estiramiento y desgaste, lo que significa que la potencia de salida es en realidad menor que la potencia de entrada, lo que significa que la ventaja mecánica del sistema real será menor que la calculada para un mecanismo ideal. Una transmisión por cadena o correa puede perder hasta un 5% de la potencia a través del sistema en calor por fricción, deformación y desgaste, en cuyo caso la eficiencia de la transmisión es del 95%.
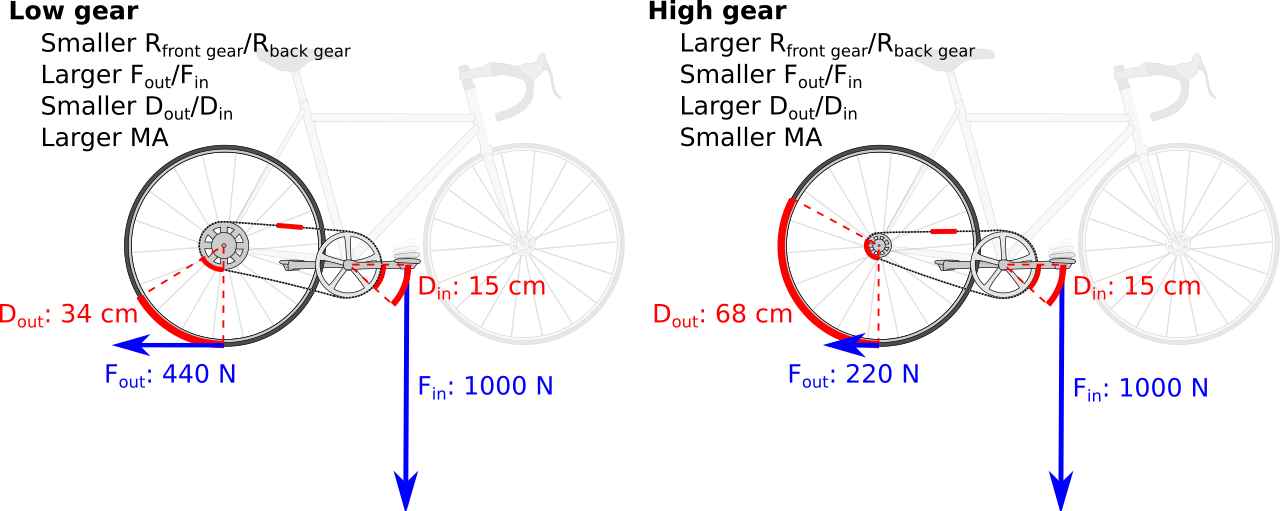
Considere la bicicleta de 18 velocidades con bielas de 7 pulgadas (radio) y ruedas de 26 pulgadas (diámetro). Si los piñones de la biela y de la rueda motriz trasera son del mismo tamaño, entonces la relación entre la fuerza de salida sobre el neumático y la fuerza de entrada sobre el pedal se puede calcular a partir de la ley de la palanca como
Ahora, supongamos que las ruedas dentadas delanteras tienen una opción de 28 y 52 dientes, y que las ruedas dentadas traseras tienen una opción de 16 y 32 dientes. Utilizando diferentes combinaciones, podemos calcular las siguientes relaciones de velocidad entre las ruedas dentadas delanteras y traseras
La relación entre la fuerza que impulsa la bicicleta y la fuerza sobre el pedal, que es la ventaja mecánica total de la bicicleta, es el producto de la relación de velocidad (o relación de los dientes de la rueda dentada de salida/rueda dentada de entrada) y la relación de la palanca de la cigüeñal-rueda.
Obsérvese que en todos los casos la fuerza sobre los pedales es mayor que la fuerza que impulsa la bicicleta hacia adelante (en la ilustración anterior, se indica la fuerza de reacción correspondiente dirigida hacia atrás en el suelo).
Un polipasto es un conjunto de cuerda y poleas que se utiliza para levantar cargas. Se ensamblan varias poleas para formar los polipastos, una que es fija y otra que se mueve con la carga. La cuerda se pasa a través de las poleas para proporcionar una ventaja mecánica que amplifica la fuerza aplicada a la cuerda. [4]
Para determinar la ventaja mecánica de un sistema de poleas y aparejos, considere el caso simple de una polea de cañón, que tiene una sola polea montada o fija y una sola polea móvil. La cuerda se enhebra alrededor de la polea fija y cae hasta la polea móvil, donde se enhebra alrededor de la polea y se vuelve a subir para anudarse a la polea fija.

Sea S la distancia desde el eje del bloque fijo hasta el extremo de la cuerda, que es A , donde se aplica la fuerza de entrada. Sea R la distancia desde el eje del bloque fijo hasta el eje del bloque móvil, que es B , donde se aplica la carga.
La longitud total de la cuerda L se puede escribir como
donde K es la longitud constante de la cuerda que pasa sobre las poleas y no cambia a medida que se mueve el polipasto.
Las velocidades V A y V B de los puntos A y B están relacionadas por la longitud constante de la cuerda, es decir
o
El signo negativo muestra que la velocidad de la carga es opuesta a la velocidad de la fuerza aplicada, lo que significa que cuando tiramos de la cuerda hacia abajo, la carga se mueve hacia arriba.
Sea V A positivo hacia abajo y V B positivo hacia arriba, por lo que esta relación se puede escribir como la relación de velocidad.
donde 2 es el número de secciones de cuerda que sostienen el bloque móvil.
Sea F A la fuerza de entrada aplicada en A, en el extremo de la cuerda, y F B la fuerza en B sobre el bloque en movimiento. Al igual que las velocidades, F A se dirige hacia abajo y F B se dirige hacia arriba.
Para un sistema de polipasto ideal no hay fricción en las poleas ni deflexión ni desgaste en la cuerda, lo que significa que la potencia de entrada por la fuerza aplicada F A V A debe ser igual a la potencia de salida que actúa sobre la carga F B V B , es decir
La relación entre la fuerza de salida y la fuerza de entrada es la ventaja mecánica de un sistema de aparejo de pistola ideal.
Este análisis se generaliza a un bloque y aparejo ideal con un bloque móvil sostenido por n secciones de cuerda,
Esto demuestra que la fuerza ejercida por un bloque y aparejo ideal es n veces la fuerza de entrada, donde n es el número de secciones de cuerda que sostienen el bloque móvil.
La ventaja mecánica que se calcula asumiendo que no se pierde potencia por deflexión, fricción y desgaste de una máquina es el rendimiento máximo que se puede lograr. Por este motivo, a menudo se la denomina ventaja mecánica ideal (VMI). En funcionamiento, la deflexión, la fricción y el desgaste reducirán la ventaja mecánica. La cantidad de esta reducción de la ventaja mecánica ideal a la ventaja mecánica real (VMA) se define mediante un factor llamado eficiencia , una cantidad que se determina mediante experimentación.
A modo de ejemplo, utilizando un polipasto con seis secciones de cuerda y unCon una carga de 600 libras , el operador de un sistema ideal tendría que tirar de la cuerda seis pies y ejercer100 lb F de fuerza para levantar la carga un pie. Ambas relaciones F salida / F entrada y V entrada / V salida muestran que la IMA es seis. Para la primera relación,Una entrada de fuerza de 100 lb F da como resultado600 lb F de fuerza de salida. En un sistema real, la fuerza de salida sería menor a 600 libras debido a la fricción en las poleas. La segunda relación también produce una media móvil de 6 en el caso ideal, pero un valor menor en el escenario práctico; no tiene en cuenta adecuadamente las pérdidas de energía , como el estiramiento de la cuerda. Restando esas pérdidas de la media móvil o utilizando la primera relación se obtiene la media móvil ama.
La ventaja mecánica ideal (VMI), o ventaja mecánica teórica , es la ventaja mecánica de un dispositivo suponiendo que sus componentes no se flexionan, no hay fricción y no hay desgaste. Se calcula utilizando las dimensiones físicas del dispositivo y define el rendimiento máximo que puede alcanzar el dispositivo.
Los supuestos de una máquina ideal son equivalentes al requisito de que la máquina no almacene ni disipe energía; por lo tanto, la potencia que entra en la máquina es igual a la potencia que sale. Por lo tanto, la potencia P es constante a través de la máquina y la fuerza multiplicada por la velocidad que entra en la máquina es igual a la fuerza multiplicada por la velocidad que sale, es decir,
La ventaja mecánica ideal es la relación entre la fuerza que sale de la máquina (carga) y la fuerza que entra en la máquina (esfuerzo), o
La aplicación de la relación de potencia constante produce una fórmula para esta ventaja mecánica ideal en términos de la relación de velocidad:
La relación de velocidad de una máquina se puede calcular a partir de sus dimensiones físicas. La suposición de potencia constante permite utilizar la relación de velocidad para determinar el valor máximo de la ventaja mecánica.
La ventaja mecánica real (AMA) es la ventaja mecánica determinada por la medición física de las fuerzas de entrada y salida. La ventaja mecánica real tiene en cuenta la pérdida de energía debido a la deflexión, la fricción y el desgaste.
El AMA de una máquina se calcula como la relación entre la fuerza de salida medida y la fuerza de entrada medida.
donde las fuerzas de entrada y salida se determinan experimentalmente.
La relación entre la ventaja mecánica determinada experimentalmente y la ventaja mecánica ideal es la eficiencia mecánica η de la máquina,




















