La curva de resistencia o polar de resistencia es la relación entre la resistencia de una aeronave y otras variables, como la sustentación, el coeficiente de sustentación, el ángulo de ataque o la velocidad. Puede describirse mediante una ecuación o mostrarse como un gráfico (a veces llamado "diagrama polar"). [1] La resistencia puede expresarse como resistencia real o como coeficiente de resistencia.
Las curvas de resistencia están estrechamente relacionadas con otras curvas que no muestran resistencia, como la curva de potencia requerida/velocidad o la curva de tasa de caída/velocidad.



Las propiedades aerodinámicas significativas de las alas de los aviones se resumen en dos magnitudes adimensionales, los coeficientes de sustentación y de resistencia CL y CD . Al igual que otras magnitudes aerodinámicas similares , son funciones únicamente del ángulo de ataque α , el número de Reynolds R e y el número de Mach M. CL y CD se pueden representar gráficamente en función de α o entre sí. [ 2] [3]
Las fuerzas de sustentación y arrastre, L y D , se escalan por el mismo factor para obtener C L y C D , por lo que L / D = C L / C D. L y D están en ángulos rectos, con D paralelo a la velocidad de la corriente libre (la velocidad relativa del aire distante circundante), por lo que la fuerza resultante R se encuentra en el mismo ángulo con D que la línea desde el origen del gráfico hasta el punto C L , C D correspondiente y el eje C D.
Si una superficie aerodinámica se mantiene en un ángulo de ataque fijo en un túnel de viento , y se miden la magnitud y la dirección de la fuerza resultante, se pueden representar gráficamente utilizando coordenadas polares . Cuando esta medición se repite en diferentes ángulos de ataque, se obtiene la curva de resistencia. Los datos de sustentación y resistencia se recopilaron de esta manera en la década de 1880 por Otto Lilienthal y alrededor de 1910 por Gustav Eiffel , aunque no se presentaron en términos de los coeficientes más recientes. Eiffel fue el primero en utilizar el nombre "arrastre polar", [4] sin embargo, las curvas de resistencia rara vez se representan gráficamente hoy en día utilizando coordenadas polares.
Dependiendo del tipo de aeronave, puede ser necesario trazar curvas de resistencia a distintos números de Reynolds y de Mach. El diseño de un caza requerirá curvas de resistencia a distintos números de Mach, mientras que los planeadores, que pasan su tiempo volando lentamente en corrientes térmicas o rápidamente entre ellas, pueden requerir curvas a distintos números de Reynolds, pero no se ven afectados por los efectos de compresibilidad. Durante la evolución del diseño, la curva de resistencia se irá perfeccionando. Una aeronave en particular puede tener curvas diferentes incluso con los mismos valores de Re y M, dependiendo, por ejemplo, de si el tren de aterrizaje y los flaps están desplegados. [2]

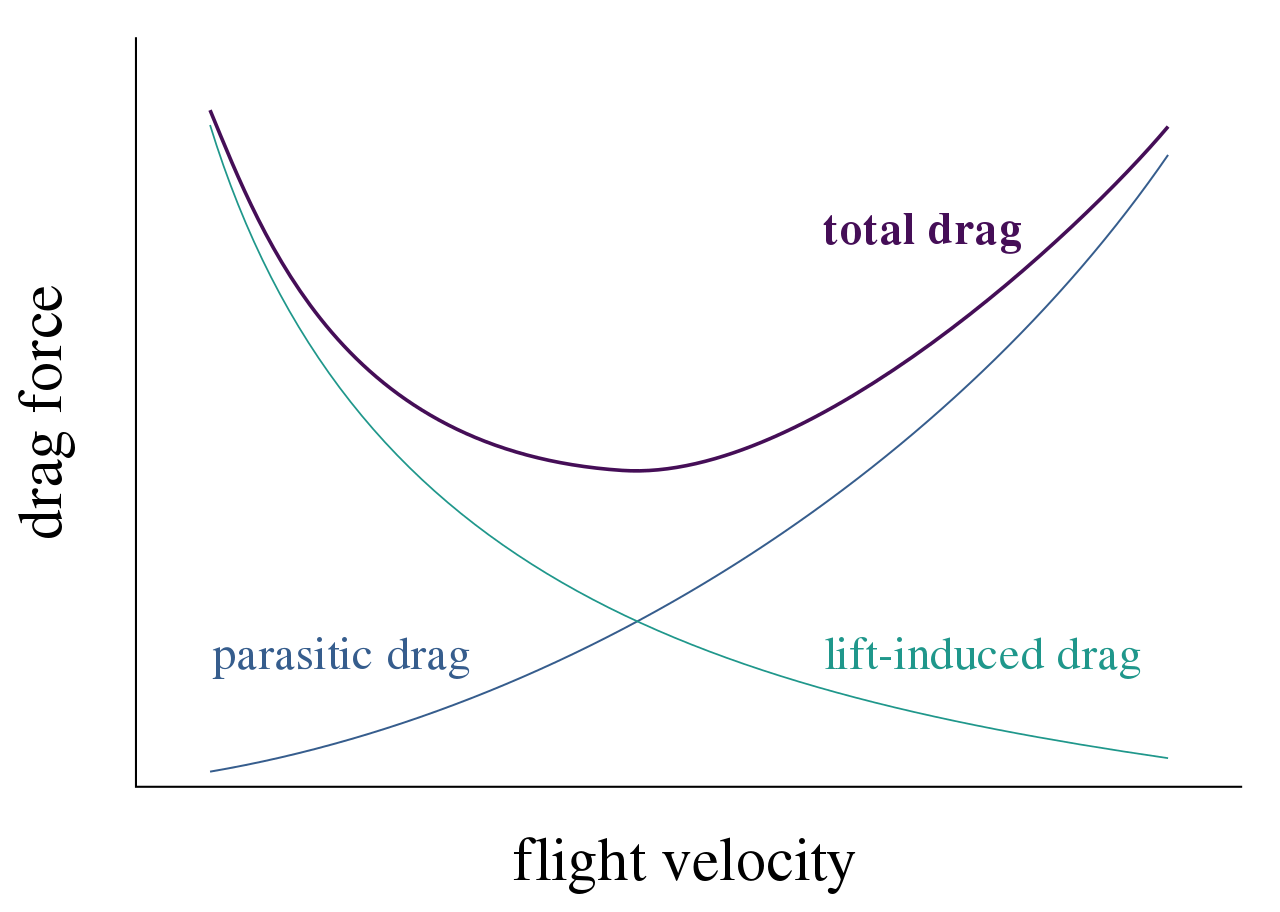
El diagrama adjunto muestra C L contra C D para una aeronave ligera típica. El punto C D mínimo está en el punto más a la izquierda del gráfico. Un componente de la resistencia es la resistencia inducida (un efecto secundario inevitable de producir sustentación, que se puede reducir aumentando la velocidad aerodinámica indicada ). Esta es proporcional a C L 2 . Los otros mecanismos de resistencia, la resistencia parásita y la resistencia ondulatoria , tienen componentes constantes, que suman C D0 , y contribuciones dependientes de la sustentación que aumentan en proporción a C L 2 . En total, entonces
El efecto de C L0 es desplazar la curva hacia arriba en el gráfico; físicamente, esto es causado por alguna asimetría vertical, como un ala curvada o un ángulo de incidencia finito , que garantiza que la actitud de arrastre mínimo produzca sustentación y aumente la relación sustentación-arrastre máxima . [2] [5]
Un ejemplo de la forma en que se utiliza la curva en el proceso de diseño es el cálculo de la curva de potencia requerida ( P R ), que representa gráficamente la potencia necesaria para un vuelo estable y nivelado en el rango de velocidad de operación. Las fuerzas involucradas se obtienen a partir de los coeficientes mediante la multiplicación por (ρ/2).S V 2 , donde ρ es la densidad de la atmósfera a la altitud de vuelo, S es el área del ala y V es la velocidad. En vuelo nivelado, la sustentación es igual al peso W y el empuje es igual a la resistencia, por lo que

El factor extra de V /η, con η la eficiencia de la hélice , en la segunda ecuación entra porque P R = (empuje requerido) × V /η. La potencia en lugar del empuje es apropiada para una aeronave impulsada por hélice, ya que es aproximadamente independiente de la velocidad; los motores a reacción producen un empuje constante. Dado que el peso es constante, la primera de estas ecuaciones determina cómo CL cae con el aumento de la velocidad. Poner estos valores CL en la segunda ecuación con C D de la curva de resistencia produce la curva de potencia. La región de baja velocidad muestra una caída en la resistencia inducida por sustentación, a través de un mínimo seguido de un aumento en la resistencia del perfil a velocidades más altas. La potencia mínima requerida, a una velocidad de 195 km/h (121 mph) es de aproximadamente 86 kW (115 hp); se requieren 135 kW (181 hp) para una velocidad máxima de 300 km/h (186 mph). El vuelo al mínimo de potencia proporcionará la máxima resistencia ; La velocidad para el mayor alcance es aquella en la que la tangente a la curva de potencia pasa por el origen, aproximadamente 240 km/h (150 mph). [6 ]
Si se dispone de una expresión analítica para la curva, se pueden desarrollar relaciones útiles mediante la diferenciación . Por ejemplo, la forma anterior, simplificada ligeramente poniendo C L0 = 0, tiene un C L / C D máximo en C L 2 = C D0 /K . Para un avión de hélice, esta es la condición de máxima resistencia y da una velocidad de 185 km/h (115 mph). La condición de alcance máximo correspondiente es el máximo de C L 3/2 / C D , en C L 2 = 3.C D0 /K , y por lo tanto la velocidad óptima es 244 km/h (152 mph). Los efectos de la aproximación C L0 = 0 son menores del 5%; por supuesto, con un C L0 = 0,1 finito, los métodos analíticos y gráficos dan los mismos resultados. [6]
La región de vuelo de baja velocidad se conoce como la "parte posterior de la curva de potencia" o "detrás de la curva de potencia" [7] [8] (a veces "parte posterior de la curva de resistencia"), donde se requiere más empuje para mantener el vuelo a velocidades más bajas. Es una región de vuelo ineficiente porque una disminución de la velocidad requiere un mayor empuje y un aumento resultante en el consumo de combustible. Se considera una región de vuelo de "velocidad inestable", porque a diferencia de las circunstancias normales, una disminución de la velocidad debido a un mayor ángulo de ataque a partir de una entrada de control de cabeceo con el morro hacia arriba no se corregirá por sí sola cuando cese la entrada de control. En cambio, la velocidad permanecerá baja y la resistencia se acumulará progresivamente a medida que la velocidad continúa disminuyendo, lo que hace que la velocidad de descenso aumente o la velocidad de ascenso disminuya, y esta condición persistirá hasta que se aumente el empuje, se reduzca el ángulo de ataque (lo que reducirá la altitud) o se reduzca la resistencia de otra manera (por ejemplo, retrayendo el tren de aterrizaje ). El vuelo sostenido por detrás de la curva de potencia requiere un pilotaje alerta, ya que un empuje inadecuado provocará una disminución constante de la velocidad y un aumento constante correspondiente de la velocidad de descenso, lo que puede pasar desapercibido y puede ser difícil de corregir a baja altitud. Un resultado no infrecuente es que la aeronave se "deslice" y se estrelle antes del sitio de aterrizaje previsto porque el piloto no redujo el ángulo de ataque o no aumentó el empuje a tiempo, o porque no se dispone del empuje adecuado; este último es un peligro particular durante un aterrizaje forzoso después de una falla del motor. [8] [9]
La falta de control de la velocidad aerodinámica y la tasa de descenso mientras se vuela detrás de la curva de potencia se ha relacionado con una serie de accidentes de aviación importantes, como el vuelo 214 de Asiana Airlines . [9]
Para que un avión ascienda en un ángulo θ y a una velocidad V, su motor debe desarrollar más potencia P que la potencia requerida P R para equilibrar la resistencia experimentada a esa velocidad en vuelo nivelado y que se muestra en el gráfico de potencia requerida. En vuelo nivelado P R / V = D pero en el ascenso hay un componente de peso adicional que se debe incluir, es decir
Por lo tanto, la velocidad de ascenso RC = V .sin θ = ( P - P R )/ W . [10] Suponiendo que se instala el motor de 135 kW necesario para una velocidad máxima de 300 km/h, la potencia máxima excedente es 135 - 87 = 48 Kw con el mínimo de P R y la velocidad de ascenso de 2,4 m/s.
En el caso de los aviones de hélice (incluidos los turbohélices ), el alcance máximo y, por lo tanto, la máxima eficiencia de combustible se logran volando a la velocidad que permita obtener la máxima relación sustentación-resistencia. Esta es la velocidad que cubre la mayor distancia con una cantidad determinada de combustible. La máxima autonomía (tiempo en el aire) se logra a una velocidad menor, cuando la resistencia se minimiza.
En el caso de los aviones a reacción, la máxima autonomía se produce cuando se maximiza la relación sustentación-resistencia. El alcance máximo se produce a una velocidad más alta. Esto se debe a que los motores a reacción producen empuje, no potencia. Los aviones de turbohélice producen algo de empuje a través de los gases de escape de la turbina, pero la mayor parte de su producción se produce en forma de potencia a través de la hélice.
La velocidad de crucero de largo alcance (LRC) se elige normalmente para ofrecer un 1% menos de eficiencia de combustible que la velocidad de alcance máximo, porque esto da como resultado un aumento de la velocidad del 3-5%. Sin embargo, el combustible no es el único costo marginal en las operaciones de las aerolíneas, por lo que la velocidad para la operación más económica (ECON) se elige en función del índice de costos (CI), que es la relación entre el costo del tiempo y el costo del combustible. [11]

Sin potencia, un avión planeador solo tiene la gravedad para impulsarlo. En un ángulo de planeo de θ, el peso tiene dos componentes, W .cos θ en ángulo recto con la línea de vuelo y W .sin θ paralelo a ella. Estos se equilibran con los componentes de fuerza y sustentación respectivamente, por lo que
Dividiendo una ecuación por la otra se obtiene que el ángulo de planeo se obtiene mediante tan θ = C D / C L . Las características de rendimiento de mayor interés en el vuelo sin motor son la velocidad en el suelo, por ejemplo V g , y la velocidad de caída V s ; estas se muestran al representar gráficamente V .sin θ = V s contra V .cos θ = V g . Estos gráficos se denominan generalmente polares y para producirlos se requiere el ángulo de planeo como función de V . [12]
Una forma de encontrar soluciones a las dos ecuaciones de fuerza es elevarlas al cuadrado y luego sumarlas; esto muestra que los posibles valores de CL, CD se encuentran en un círculo de radio 2. W / S .ρ . V 2 . Cuando esto se grafica en la polar de arrastre, la intersección de las dos curvas ubica la solución y se lee su valor θ. Alternativamente, teniendo en cuenta que los deslizamientos suelen ser poco profundos, la aproximación cos θ ≃ 1, buena para θ menor a 10°, se puede utilizar en la ecuación de sustentación y calcular el valor de CL para una V elegida, encontrando CL a partir de la polar de arrastre y luego calculando θ. [12]
El ejemplo polar que se muestra aquí muestra el rendimiento de planeo de la aeronave analizada anteriormente, suponiendo que su polar de arrastre no se altera mucho por la hélice estacionaria. Una línea recta desde el origen hasta algún punto de la curva tiene un gradiente igual al ángulo de planeo a esa velocidad, por lo que la tangente correspondiente muestra el mejor ángulo de planeo tan −1 ( C D / C L ) min ≃ 3,3°. Esta no es la tasa de caída más baja, pero proporciona el mayor alcance, requiriendo una velocidad de 240 km/h (149 mph); la tasa de caída mínima de aproximadamente 3,5 m/s es a 180 km/h (112 mph), velocidades vistas en los gráficos anteriores con motor. [12]


Un gráfico que muestra la tasa de caída de un avión (normalmente un planeador ) en función de su velocidad aerodinámica se conoce como curva polar. [14] Las curvas polares se utilizan para calcular la velocidad mínima de caída del planeador, la mejor sustentación sobre resistencia (L/D) y la velocidad de vuelo . [13]
La curva polar de un planeador se obtiene a partir de cálculos teóricos o midiendo la velocidad de caída a distintas velocidades. Estos puntos de datos se conectan mediante una línea para formar la curva. Cada tipo de planeador tiene una curva polar única y los planeadores individuales varían un poco dependiendo de la suavidad del ala, la resistencia de la superficie de control o la presencia de insectos, suciedad y lluvia en el ala. Diferentes configuraciones de planeador tendrán diferentes curvas polares, por ejemplo, vuelo en solitario o en grupo, con y sin lastre de agua, diferentes configuraciones de flaps o con y sin extensiones de punta de ala. [14]
Conocer la mejor velocidad para volar es importante para aprovechar al máximo el rendimiento de un parapente. Dos de las medidas clave del rendimiento de un parapente son su tasa de caída mínima y su mejor relación de planeo , también conocida como el mejor "ángulo de planeo". Estas se producen a diferentes velocidades. Conocer estas velocidades es importante para un vuelo de distancia eficiente . En aire en calma, la curva polar muestra que volar a la velocidad de caída mínima permite al piloto permanecer en el aire durante el mayor tiempo posible y ascender lo más rápido posible, pero a esta velocidad el parapente no viajará tan lejos como si volara a la velocidad para el mejor planeo.
La mejor velocidad para volar con viento en contra se determina a partir del gráfico desplazando el origen hacia la derecha a lo largo del eje horizontal según la velocidad del viento en contra y dibujando una nueva línea tangente. Esta nueva velocidad aerodinámica será mayor a medida que aumente el viento en contra, pero dará como resultado la mayor distancia cubierta. Una regla general es sumar la mitad del componente del viento en contra a la mejor relación de vuelo/desviación para la distancia máxima. Para el viento de cola, el origen se desplaza hacia la izquierda según la velocidad del viento de cola y se dibuja una nueva línea tangente. La velocidad del viento de cola para volar se encontrará entre la caída mínima y la mejor relación de vuelo/desviación. [14]
En condiciones de aire descendiente, la curva polar se desplaza hacia abajo según la tasa de caída de la masa de aire y se dibuja una nueva línea tangente. Esto mostrará la necesidad de volar más rápido en condiciones de aire descendiente, lo que le da a este último menos tiempo para reducir la altitud del planeador. En consecuencia, la curva polar se desplaza hacia arriba según la tasa de sustentación y se dibuja una nueva línea tangente. [13]
El aumento de peso no afecta el alcance máximo de un avión planeador. El ángulo de planeo solo está determinado por la relación sustentación/resistencia. Un mayor peso requerirá una mayor velocidad aerodinámica para mantener el ángulo de planeo óptimo, por lo que un avión planeador más pesado tendrá una resistencia reducida, porque desciende a lo largo de la trayectoria de planeo óptima a un ritmo más rápido. [15]
En las carreras, los pilotos de planeadores suelen utilizar agua como lastre para aumentar el peso de su planeador. Esto aumenta la velocidad óptima, a costa de un rendimiento a baja velocidad y una menor tasa de ascenso en térmicas. [16] El lastre también se puede utilizar para ajustar el centro de gravedad del planeador, lo que puede mejorar el rendimiento.
Otra curva útil que se utiliza habitualmente para informar sobre datos de túneles de viento es la curva C L vs C D , que a veces se denomina diagrama polar .